وحدة روبوت مشتركة مدمجة Ti5 Robot CRA-RI60-80-PRO-XX — محرك توافقي، 24–48 فولت، CAN/EtherCAT، جهاز تشفير 17 بت
وحدة روبوت مشتركة مدمجة Ti5 Robot CRA-RI60-80-PRO-XX — محرك توافقي، 24–48 فولت، CAN/EtherCAT، جهاز تشفير 17 بت
Ti5 Robot
تعذر تحميل توفر الالتقاط
ملخص
روبوت Ti5 CRA-RI60-80-PRO-XX مفصل مدمج ذو عمود مجوف، مُصمم خصيصًا للبشر، والروبوتات التعاونية، والمعالجات المتنقلة. يجمع بين مُخفِّض توافقي فائق الرقة، محرك عزم الدوران بدون إطار، محرك سيرفو FOC، و مشفر مغناطيسي مطلق في وحدة واحدة، تقديم ناتج رد فعل عنيف قريب من الصفر، ضوضاء منخفضة، وكثافة عزم دوران عالية. يدعم المفصل يستطيع أو إيثركات، مشفرات مفردة أو مزدوجة، و فرامل تثبيت اختياريةيتوفر طولان: PRO-XX القياسي والممتد برو-XX-بي (جسم أطول، عزم دوران أعلى، ثقب أكبر).
الميزات الرئيسية
-
مفصل الكل في واحد: مخفض التوافقيات + محرك عزم الدوران + محرك FOC + مشفر مطلق.
-
رد فعل عنيف قريب من الصفر عند الإخراج؛ التحكم السلس في السرعة المنخفضة والضوضاء الصوتية المنخفضة.
-
تصميم العمود المجوف لمرور الكابل/المجرى الهوائي؛ نسب تخفيض متعددة.
-
مُشفِّر مطلق، 17 بت، ذاكرة موضع فقدان الطاقة؛ اختياري مشفر مزدوج إصدار.
-
تواصل: يستطيع أو إيثركات قابلة للاختيار.
-
قوة: 24–48 فولت، محرك متكامل، فئة قوة المحرك 300 واط.
-
فرامل تثبيت اختيارية؛ IP/مقاوم للماء &درجة حرارة منخفضة التخصيص متاح.
-
جاهز للتطبيق للمحور المحوري، والإنسان الآلي، والروبوتات التعاونية، والمعدات الصناعية، وروبوتات الدورية، والأجهزة البحرية.
تحديد
كهربائي & Control (مشتركة بين PRO-XX/PRO-XX-B)
-
قوة المحرك المقدرة: 300 واط
-
جهد التغذية: 24–48 فولت تيار مستمر
-
أقصى تيار مستمر: 6.7 أ; التيار المقدر: 5 أ
-
مقاومة الطور: 0.33 أوم
-
ثابت عزم الدوران: 0.096 نيوتن متر/أمبير
-
المحاثة: 0.074 مللي هـ
-
أزواج الأقطاب: 10
-
المشفر: 17 بت مطلق؛ خيارات ترميز مفردة/مزدوجة
-
حافلة: يستطيع (قياسي) أو إيثركات (خيار)
ميكانيكي (عمود مجوف)
-
ثقب من خلال (PRO-XX): Ø15 ملم
-
ثقب من خلال (PRO-XX-B): Ø18 ملم
-
الطول (PRO-XX): 70.4 ± 0.5 ملم؛ وزن ≈1.01 كجم;قصور الدوار ≈441 جم·سم²
-
الطول (PRO-XX-B): 92.9 ± 0.5 ملم؛ وزن ≈1.17 كجم;قصور الدوار ≈595 جم·سم²
-
التركيب: دائرة مسمار الواجهة الأمامية (مخرج مجوف)؛ مخفض التوافقيات مدمج
-
الخيارات: فرامل التثبيت؛ مشفر واحد/مزدوج؛ CAN/EtherCAT؛ مقاومة للماء &حزمة منخفضة الحرارة
خيارات المخفض &الأداء (جانب الإخراج)
رد الفعل: منخفض مثل 10–20 ثانية قوسية اعتمادا على النسبة.
| نسبة التخفيض | عزم الدوران الأقصى للبدء/التوقف (نيوتن متر) | أقصى عزم دوران متوسط للحمل (نيوتن متر) | عزم الدوران المقدر عند 2000 دورة في الدقيقة/نسبة (نيوتن متر) | السرعة القصوى (دورة في الدقيقة) | السرعة المقدرة عند ½ عزم الدوران المقدر (دورة في الدقيقة) | رد الفعل العكسي (ثانية قوسية) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
ملحوظات:
• تمت قراءة البيانات أعلاه من أوراق المنتج الخاصة بـ CRA-RI60-80-PRO-XX و برو-XX-بي.
• يتشارك PRO-XX-B نفس جدول عزم الدوران/السرعة؛ فهو يوفر فتحة مرور أكبر وقصور ذاتي أعلى مع الجسم الأطول.
التطبيقات
-
إنساني &الروبوتات الخدمية: مفاصل الكتف والكوع والورك والركبة والكاحل ذات كثافة عزم الدوران العالية.
-
أذرع الروبوت التعاونية: محاور دقيقة ذات رد فعل عكسي منخفض للتحكم السلس في القوة.
-
الجمبل أداة &وحدات التحريك والإمالة:تتبع هادئ ومستقر بسرعة منخفضة مع ذاكرة الموقع المطلقة.
-
المعدات الصناعية & AGV/AMR manipulators:تشغيل مدمج ومدمج للمساحات الضيقة.
-
روبوتات الدوريات والتفتيش القوية؛ الأجهزة البحرية/على متن السفينة (مع خيار مقاوم للماء).
تفاصيل
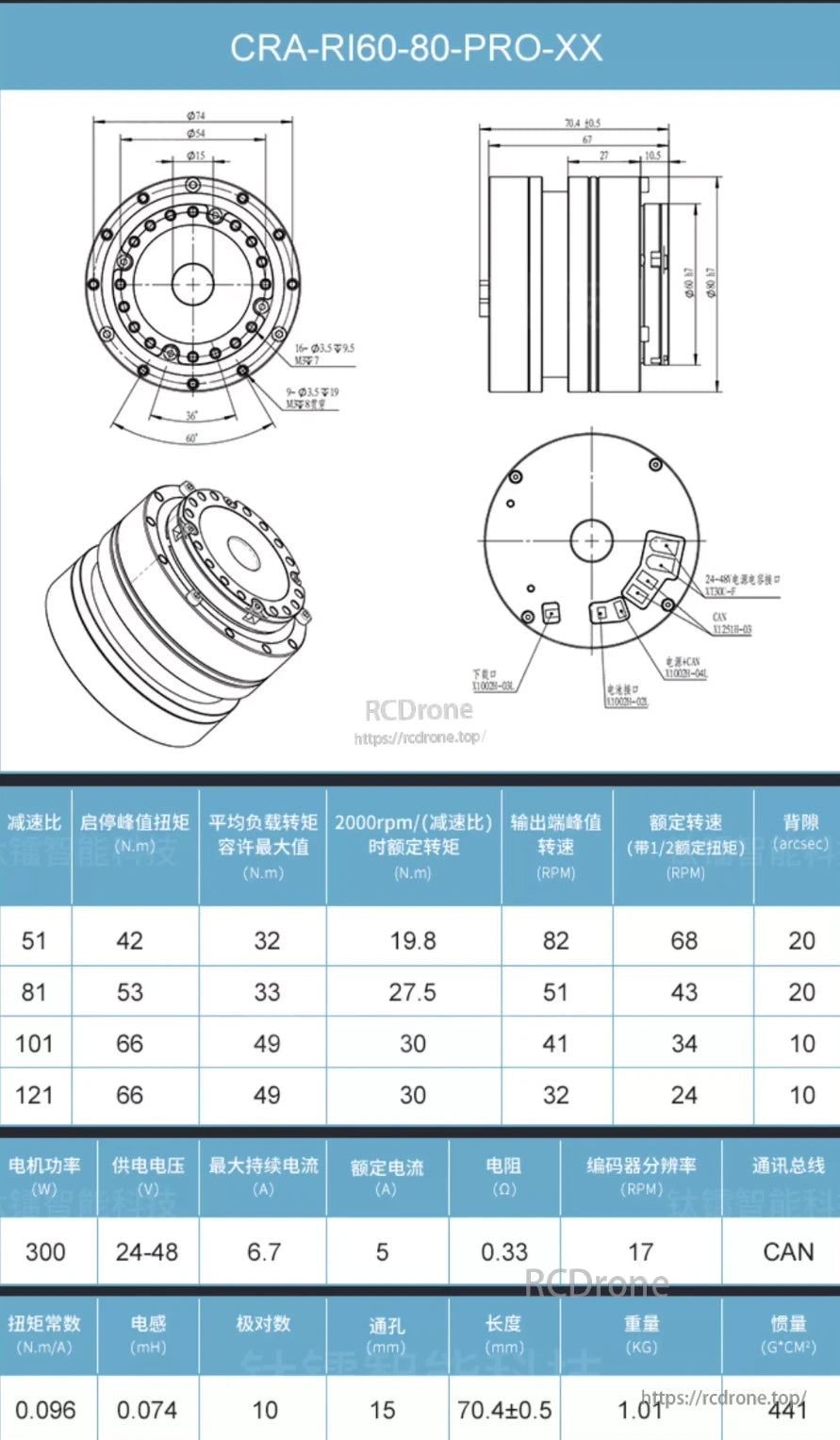
مواصفات وحدة الوصلة الروبوتية CRA-RI60-80-PRO-XX: محرك 300 واط، مدخل 24-48 فولت، ناقل CAN، مشفر 17 CPR، طول 70.4 مم، وزن 1.01 كجم، نسب تروس متعددة مع بيانات عزم الدوران والسرعة المقدمة.
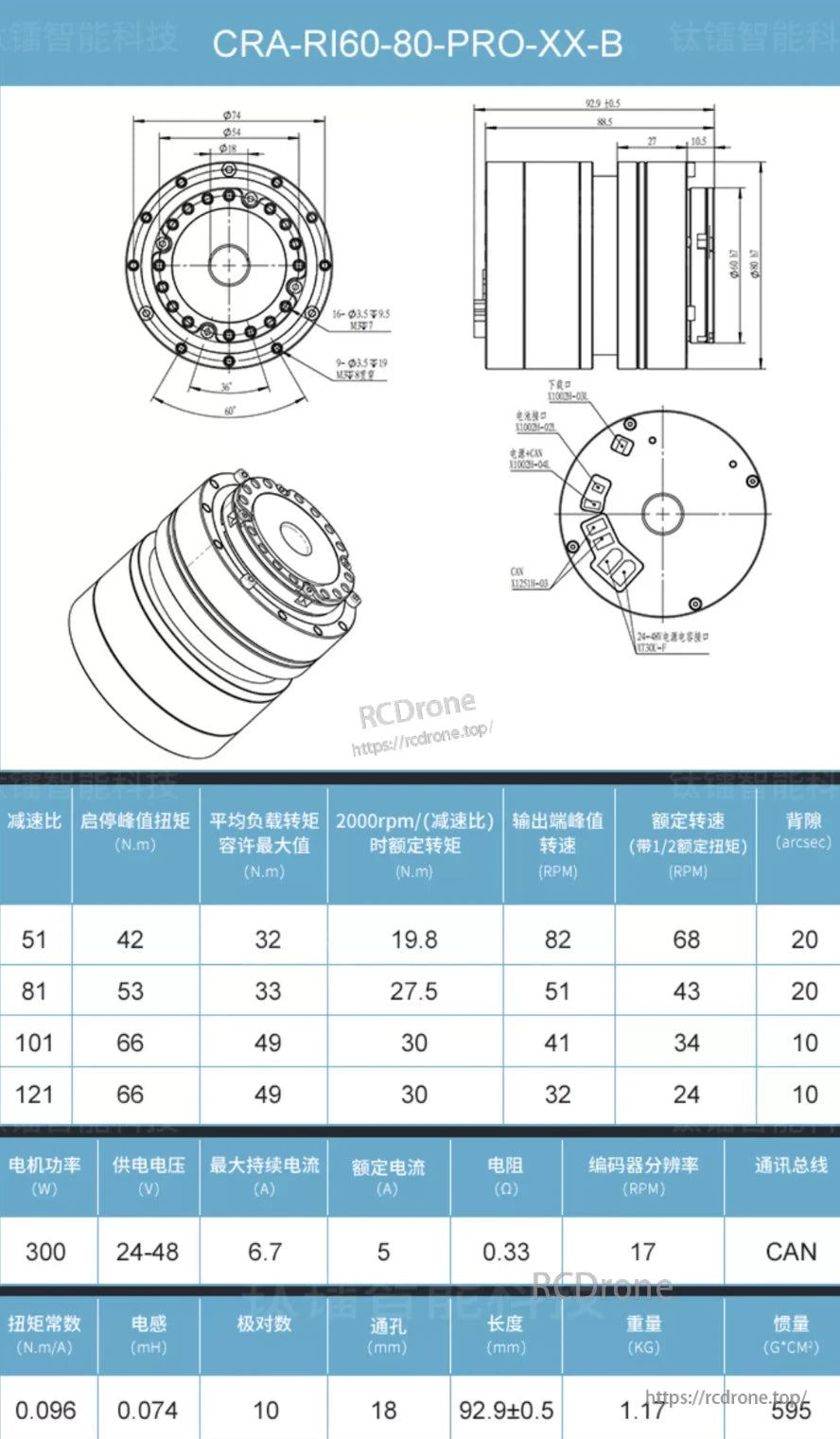
وحدة توصيل روبوت CRA-RI60-80-PRO-XX-B مزودة بمحرك 300 واط، ومصدر طاقة 24-48 فولت، وشبكة CAN، ودقة ترميز 17 دورة في الدقيقة، ونسب تروس متعددة. تشمل المواصفات الرئيسية عزم الدوران، والسرعة، والتيار، والأبعاد.
Related Collections