







Unitree IM6014 Motor N6014B-12.6 RS485 Robot Joint Motor, φ65*60mm, 24v~75v, 535g, 34.4 N.m
Unitree IM6014 Motor N6014B-12.6 RS485 Robot Joint Motor, φ65*60mm, 24v~75v, 535g, 34.4 N.m
Unitree
تعذر تحميل توفر الالتقاط
Overview
Unitree IM6014 Motor is a robot joint motor (motor model: N6014B-12.6) designed for robotic joints and automation systems. It supports high-speed RS485 communication and features dual absolute encoders (rotor and output) for feedback and control in compact joint modules.
Key Features
- Bionic robot joint motor; compact size: φ65*60mm (Diameter × Length)
- Dual ports; daisy-chain ready (RS485 multi-drop bus)
- Dual encoder control: motor-side encoder + output-side encoder (dual absolute encoder)
- High-precision bearing (high precision, high load capacity, long life)
- Quick installation: quick disassembly and assembly under low load
- Clamp mounting; suitable for high-performance robotic joints
- Hybrid control algorithm; FOC control curve graph referenced at 25°C ambient, 60V, 12.66 gear ratio
- Thermal management description: real-time temperature monitoring “400 times per second” during high-speed forward/reverse switching
Applications
- Humanoid robots
- Quadruped robots
- Robotic arms / small robotic arms
- Exoskeletons
- AGV vehicles
- ARU robots
Specifications
| Motor Model | N6014B-12.6 |
| Motor Weight | 535g |
| Dimensions | φ65*60mm |
| Max (No-load) Speed | 54.2 rad/s (60v) |
| Input Voltage | 24v~75v |
| Reduction Ratio | 3:38 |
| Max Line Current | 40A |
| Peak Torque (Output torque opposite to rotation direction) | 34.4 N.m |
| Peak Torque (Output torque same as rotation direction) | 31.7 N.m |
| Operating Temperature (Min) | -20°C |
| Operating Temperature (Max) |
Drive board stops and reports overheat error if exceeding 90°C Winding stops and reports overheat error if exceeding 130°C |
| Baud Rate | 6000000bps/4000000bps |
| Control Algorithm | Hybrid Control |
| Gear Material | Metal |
| Housing Material | Aluminum alloy + high-strength engineering plastic |
| Encoder Resolution | 15bit |
| Protocol Type | High-speed RS485 communication (8bit, 1stop, No Parity) |
| Link (Physical) | RS485 Multi-drop Bus |
| ID | 0-14 |
| Position Sensor | Rotor, Output, Dual absolute encoder |
| Command Signal | Motor ID, Operation Mode, Timeout Protection, Feedforward Torque, Target Speed, Target Position, Position Stiffness, Velocity Stiffness |
| Operating Environment | Temperature: -5°C ~ 65°C; Relative Humidity: 10%RH ~ 85%RH. |
| Motor Feedback | Torque, Angle, Angular Velocity, Temperature, Voltage, Error Status |
| Motor Control | Torque, Angle, Angular Velocity, Feedforward Torque, Position Stiffness, Velocity Stiffness |
| Warranty | 3 Months |
For integration questions (wiring, RS485 bus setup, or multi-drop addressing), contact support at https://rcdrone.top/ or email support@rcdrone.top.
Details

Built for compact robotic joints, IM6014 integrates motor, gearbox, and feedback in a small joint module.

A φ65×60 mm package delivers up to 34.4 N·m torque at just 535 g for lightweight robotic limbs.

Dual RS485 ports simplify daisy-chain wiring and multi-drop bus setups in multi-joint robots.

High-precision bearings support joint loads while maintaining smooth motion over long duty cycles.

Dual absolute encoders provide rotor and output feedback for tighter position and torque control.

Quick-disassembly structure helps reduce maintenance time when swapping or servicing joint modules.
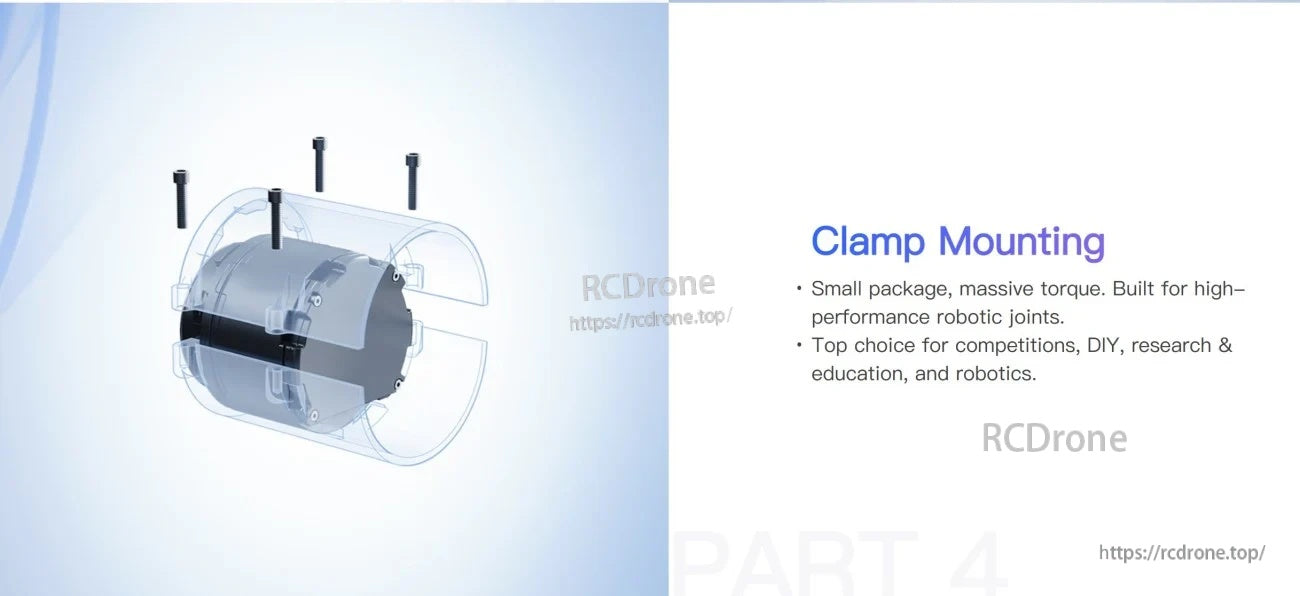
Clamp mounting enables secure integration into high-performance joint designs with minimal added hardware.

Thermal design focuses on sustained output with improved heat dissipation during demanding motion cycles.

Real-time temperature monitoring supports safer operation during rapid forward/reverse switching.
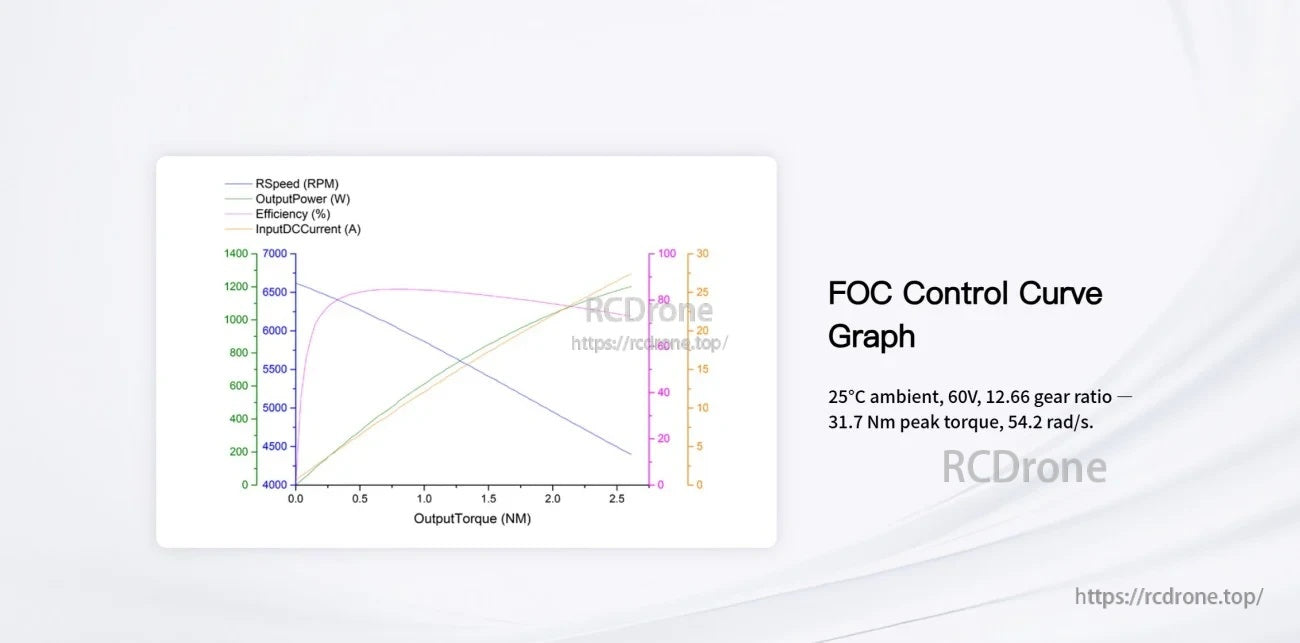
FOC control curves are referenced at 25°C ambient, 60 V, and 12.66 gear ratio for performance planning.
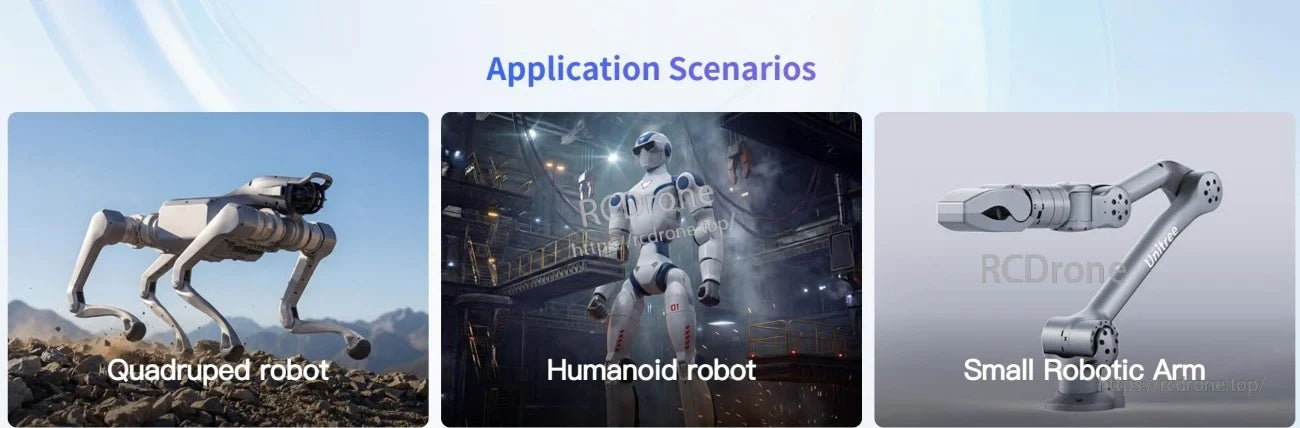
Designed for robotic joints in quadrupeds, humanoids, and compact robotic arms using RS485 control.
Related Collections







