








ويت موشن HWT601-AGV-485 IMU RS485 Modbus، IP67، 200 هرتز – جيروسكوب ومقياس تسارع وإمالة 6 محاور، متوافق مع ROS/Matlab
ويت موشن HWT601-AGV-485 IMU RS485 Modbus، IP67، 200 هرتز – جيروسكوب ومقياس تسارع وإمالة 6 محاور، متوافق مع ROS/Matlab
WitMotion
تعذر تحميل توفر الالتقاط
نظرة عامة
جهاز WitMotion HWT601-AGV-485 هو مستشعر للزاوية/الاتجاه بزاوية 6 محاور مصمم لروبوتات AGV والطائرات بدون طيار والمنصات المستقلة. يجمع بين 3 محاور تسارع + 3 محاور سرعة زاوية ويخرج زاوية 3 محاور &ورباعي عبر RS485 (Modbus) بسرعة تصل إلى 200 هرتز. يتميز الوحدة بـ تصفية ديناميكية باستخدام خوارزمية كالمان، معايرة دقيقة للدواليب، اكتساب انحياز تلقائي/يدوي، طاقة احتياطية لحفظ الاتجاه عند انقطاع الطاقة، وهيكل IP67 مقاوم للماء والغبار. كما يدعم تسلسل متعدد المستويات (حتى 32 وحدة) لقياس الزاوية المتزامن.
الميزات الرئيسية
-
زاوية عالية الدقة: دقة XY 0.1°; دقة Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
انحياز الجيروسكوب المستقر: XY 5°/ساعة; Z 2°/ساعة (HWT601-AGV-485) / 5°/ساعة (WT601-AGV-485).
-
مدخل واسع 9–36 فولت، تيار التشغيل ≈ 8 مللي أمبير @12 فولت.
-
RS485 Modbus، سرعة البود 4,800–230,400 بت في الثانية.
-
العينة: قراءة طلب–استجابة تصل إلى 200 هرتز.
-
الخوارزمية: دمج فلتر كالمان وخوارزمية اتجاه AGV المخصصة.
-
البرمجيات: مجموعة مجانية للكمبيوتر مع لوحات معلومات حية، مخططات منحنيات، تصور ثلاثي الأبعاد (سيارة/كرة/مكعب/طائرة)، تكوين (انحياز، مرجع الزاوية، معايرة التسارع، عوامل المقياس)، تسجيل البيانات &وحفظ مباشر، و استيراد Matlab.
html -
صديق للمطورين: برامج أمثلة ودعم كود لـ ROS، لينكس، C/C#، بايثون.
-
بيئي: IP67، -40~80 °C (نسخة الجدول -40~85 °C موضحة).
-
تسلسلي: حتى 32 مستشعر على RS485 لقياس الوضعية بشكل متزامن.
إرشادات التثبيت
-
قم بتركيب المستشعر على سطح مستقر، مسطح، وثابت؛ القواعد غير المستوية تسبب خطأ في الزاوية (انظر الشكل 1-2).
-
احتفظ بـ محور المستشعر موازياً للمحور المقاس؛ تجنب زوايا المحاور (انظر الشكل 3-4).
-
هذا الطراز يدعم التثبيت الأفقي فقط.
البرمجيات &والتصوير البياني
-
لوحة بيانات قوية (الزوايا، المعدل، التسارع، المغناطيسية، الكواتيرنيون، المنافذ، درجة الحرارة، الجهد، إلخ).
-
لوحة التكوين: معدل البود، عنوان الجهاز، اكتساب الانحياز التلقائي، إعادة تعيين المحور Z، معايرة التسارع، مرجع الزاوية، المعايرة اليدوية الإيجابية/السلبية وعوامل المقياس.
-
نماذج ثلاثية الأبعاد لمراقبة الحركة بشكل بديهي و المنحنيات في الوقت الحقيقي مع تحديثات ديناميكية.
-
عرض البيانات الخام وحفظ الملفات لجمع سهل؛ استيراد تحليل Matlab مدعوم.
-
عروض ROS IMU INS: تصور تتبع الوضعية وعرض بيانات الوضعية (الزاوية/الدوران/الانحدار، السرعة الزاوية، التسارع الخطي).
html
المواصفات
الواجهة &والأداء
| البند | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| الواجهة / البروتوكول | RS485 / Modbus | RS485 / Modbus |
| معدل البود | 4,800–230,400 بت في الثانية | 4,800–230,400 بت في الثانية |
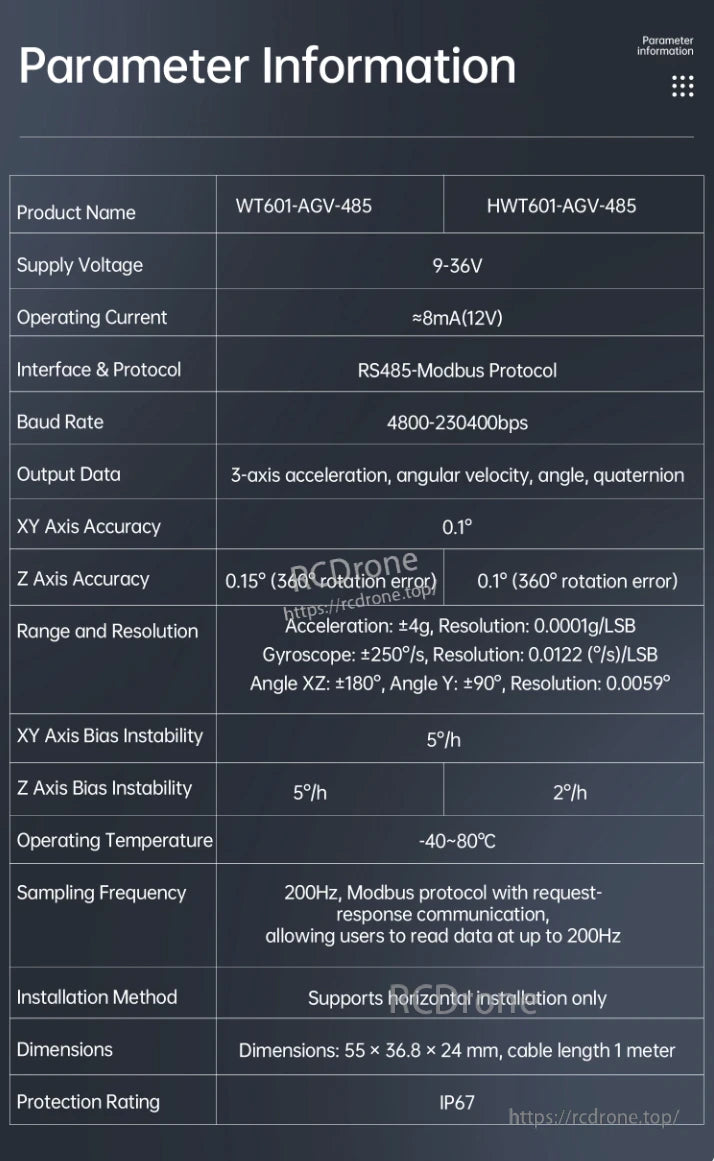
| بيانات الإخراج | تسارع ثلاثي المحاور، سرعة الزاوية، زاوية، كواتيرنيون | نفس |
| تردد العينة | حتى 200 هرتز (طلب–استجابة) | حتى 200 هرتز |
| دقة زاوية XY | 0.1° | 0. 1° |
| دقة زاوية Z (خطأ دوران 360°) | 0.1° | 0.15° |
| نطاق التسارع / الدقة | ±4 ج / 0.0001 ج/LSB | نفس الشيء |
| نطاق الجيروسكوب / الدقة | ±250 °/ث / 0.0122 (°/ث)/LSB | نفس الشيء |
| نطاق الزاوية / الدقة | XZ: ±180°; Y: ±90° / 0.0059° | نفس الشيء |
| عدم استقرار انحياز الجيروسكوب (XY / Z) | 5°/ساعة / 2°/ساعة | 5°/ساعة / 5°/ساعة |
| معامل الحرارة (XYZ) | 0.002°/°م | 0.002°/°C |
الكهربائية، الميكانيكية &والبيئة
-
جهد الإمداد: 9–36 فولت; التيار التشغيلي: ≈ 8 مللي أمبير (12 فولت)
-
الأبعاد: 55 × 36.8 × 24 مم; طول الكابل: 1 م
-
الحماية: IP67
-
درجة حرارة التشغيل: -40~80 °م (نسخة الجدول تظهر أيضًا -40~85 °م)
-
التثبيت: تركيب أفقي فقط
-
التسلسل: حتى 32 وحدة على RS485
مجالات التطبيق
روبوتات AGV/AMR والروبوتات المتنقلة، الطائرات بدون طيار/UAVs، المركبات اللوجستية غير المأهولة، ووحدات إدراك القيادة الذاتية.
تسمية النموذج &واختيار
-
HWT601-AGV-485 – دقة أعلى في محور Z (0.1°) وعدم استقرار أقل في انحياز Z (2°/ساعة).
-
WT601-AGV-485 – مواصفات المحور Z القياسية (0.15°, 5°/h).
اختر HWT601 عندما تكون دقة الاتجاه Z حرجة.
التفاصيل

مستشعر وضعية عالي الدقة بزاوية 6 مع تسارع ثلاثي المحاور، سرعة زاوية، زاوية، وكواتيرنيون. يتميز بخوارزمية اتجاه AGV، حماية IP67، تصفية كالمان، اكتساب انحياز تلقائي، ودعم برامج الكمبيوتر.
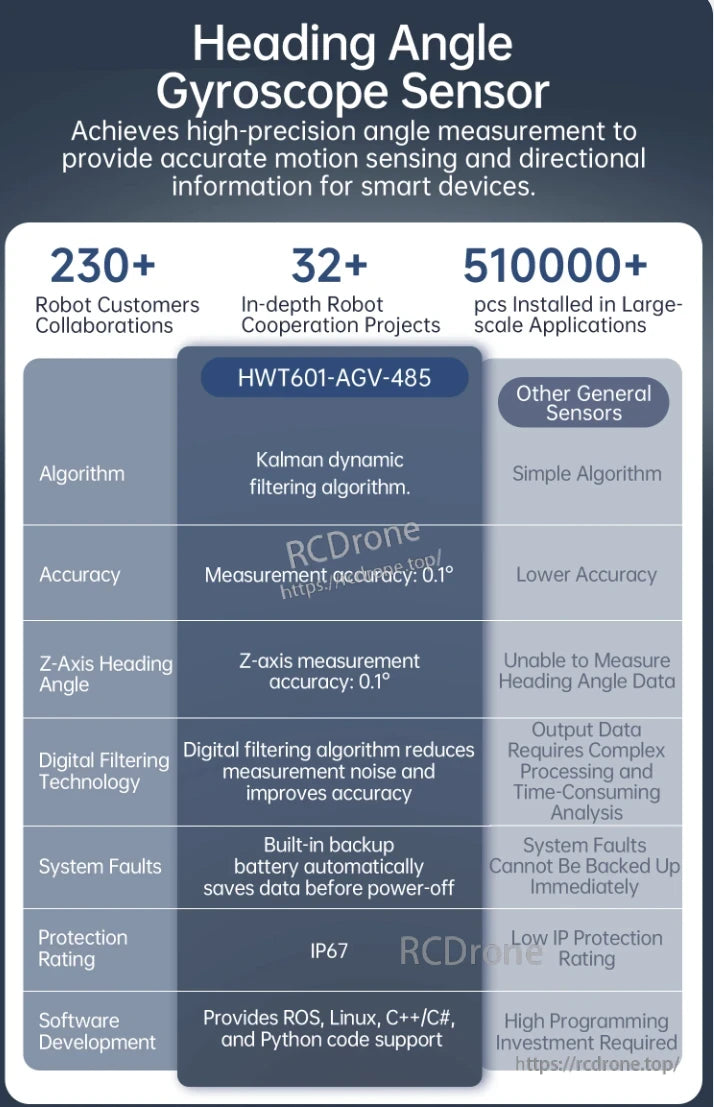
مستشعر جيروسكوب زاوية الاتجاه HWT601-AGV-485 يقدم قياس زاوية عالي الدقة مع تصفية كالمان، دقة 0.1°، تقليل الضوضاء الرقمية، حماية IP67، ويدعم ROS، Linux، C++، وPython. أكثر من 230 تعاون روبوتي و510,000+ تركيب.
جهاز HWT601-AGV-485 IMU يوفر إمدادًا من 9-36 فولت، RS485-Modbus، معدل أخذ عينات 200 هرتز، تسارع ±4g، جيروسكوب ±250°/ثانية، تصنيف IP67، ودرجة حرارة تشغيل من -40 إلى 80 درجة مئوية. يوفر بيانات ثلاثية المحاور بدقة عالية.
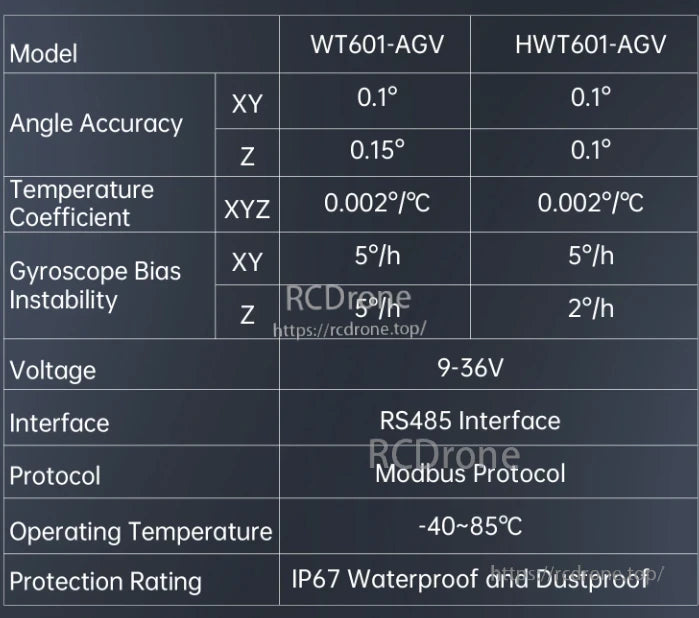
جهاز HWT601-AGV IMU يقدم دقة زاوية 0.1° في المحاور XY و Z مع معامل درجة حرارة 0.002°/°C عبر XYZ. عدم استقرار انحياز الجيروسكوب هو 5°/ساعة (XY) و 2°/ساعة (Z). يعمل على 9–36 فولت، ويستخدم RS485 مع Modbus، ويعمل من -40 إلى 85 درجة مئوية. بتصنيف IP67، يوفر حماية ضد الماء والغبار. النسخة WT601-AGV لها مواصفات مشابهة ولكن بدقة 0.15° في محور Z وعدم استقرار انحياز 5°/ساعة في محور Z. كلا الطرازين يضمنان أداءً موثوقًا في البيئات الصعبة.
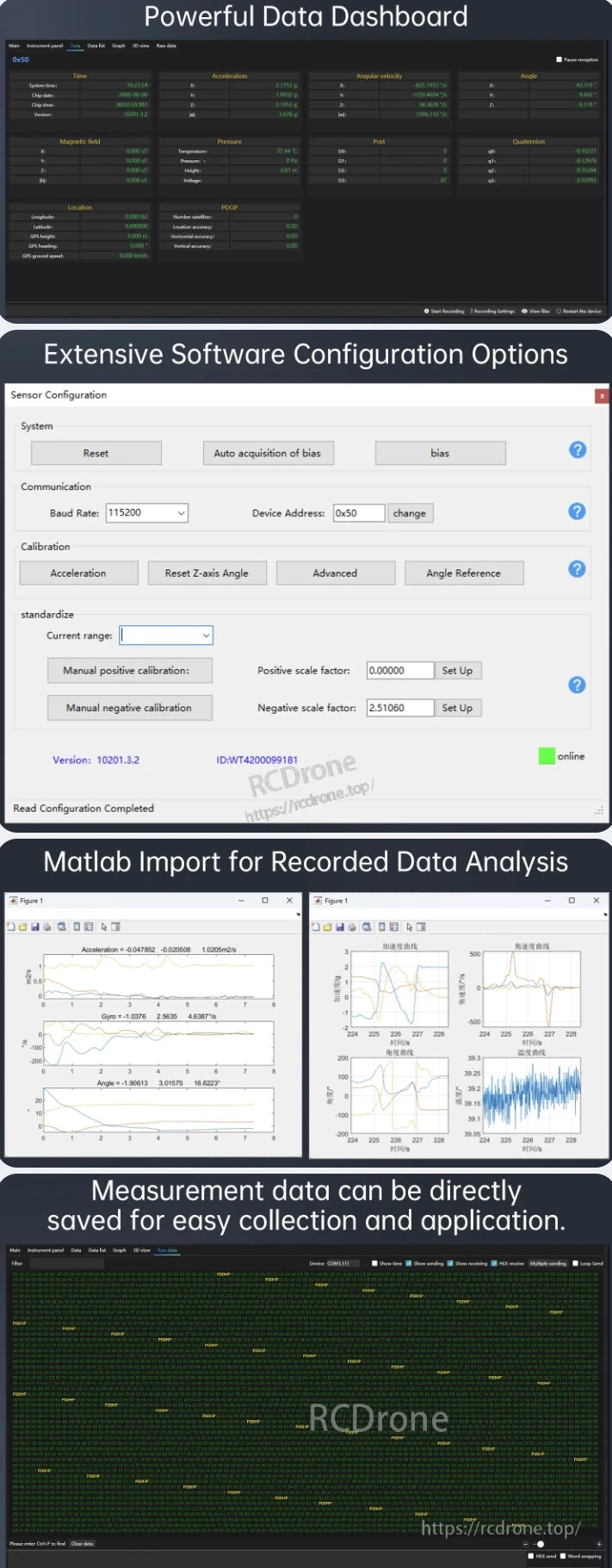
لوحة بيانات قوية مع قراءات حساسات في الوقت الحقيقي، تكوين برمجي موسع، استيراد MATLAB للتحليل، وحفظ البيانات مباشرة لجمعها وتطبيقها بسهولة.
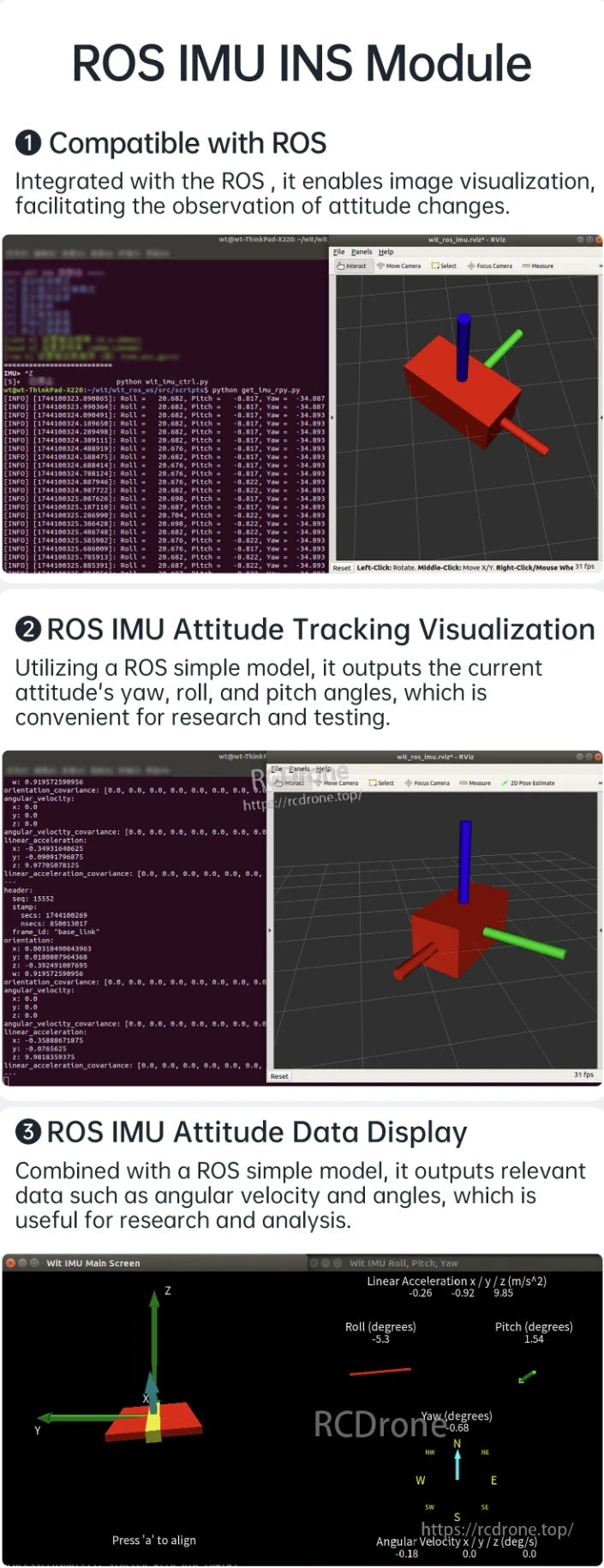
وحدة ROS IMU INS تقدم توافقية مع ROS، وتصور تتبع الاتجاه، وتعرض بيانات الدوران، الميل، الانحراف، السرعة الزاوية، والتسارع الخطي في الوقت الحقيقي للبحث والتحليل.
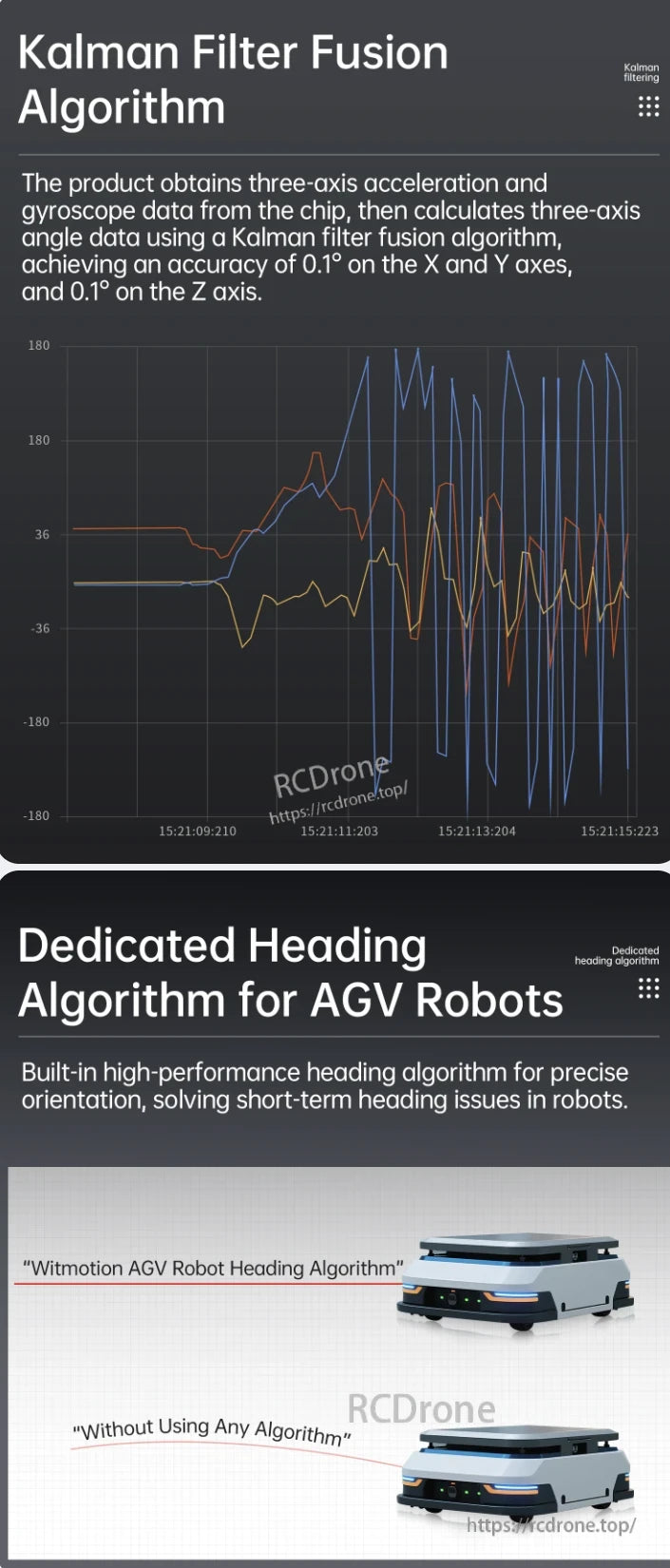
وحدة WitMotion HWT601 AGV IMU توفر بيانات زوايا دقيقة ثلاثية المحاور بدقة 0.1° باستخدام دمج فلتر كالمان. يضمن خوارزمية الاتجاه المخصصة لها استقرار توجيه الروبوت، مما يعزز الأداء بشكل كبير مقارنةً بالأنظمة التي لا تحتوي على مثل هذه الخوارزميات.
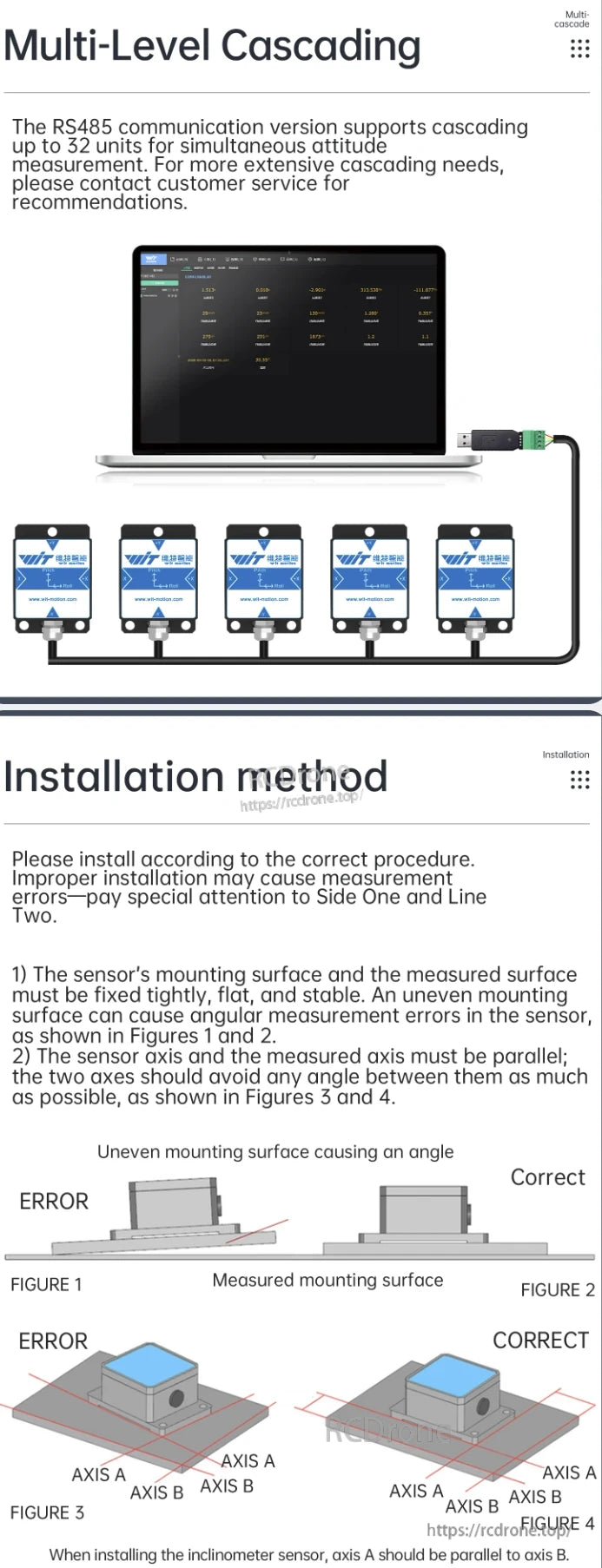
وحدة WitMotion HWT601 AGV IMU تدعم ما يصل إلى 32 وحدة متسلسلة عبر RS485 لقياس الاتجاه. تأكد من تثبيت مستوي ومستقر ومحاور متراصة لتحقيق الدقة.
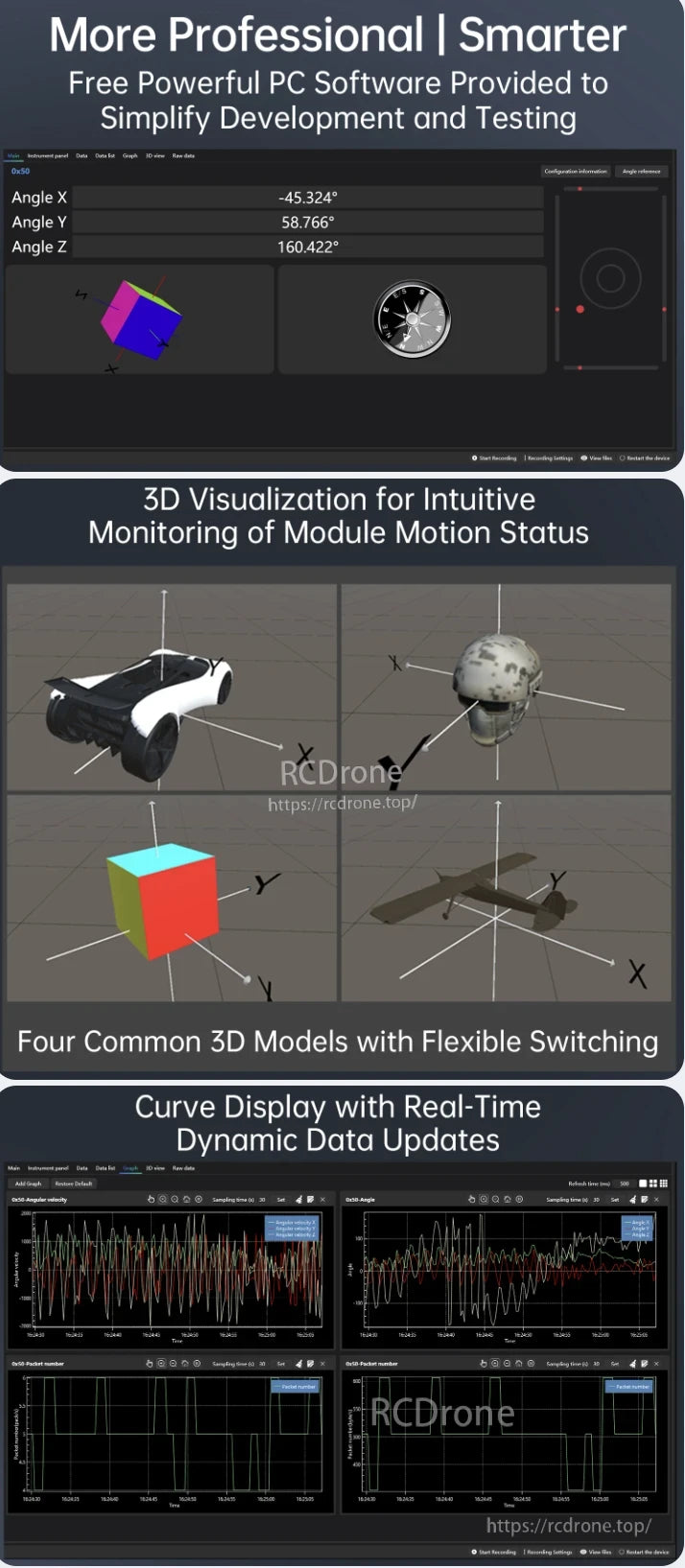
برنامج كمبيوتر احترافي لوحدة WitMotion HWT601 AGV IMU يقدم تصور ثلاثي الأبعاد في الوقت الحقيقي، ومراقبة الزوايا، وعرض المنحنيات الديناميكية.تتضمن الميزات تتبع الحركة البديهي، وتبديل النماذج المرن، وتحديثات البيانات الحية لتطوير واختبار فعال.
تشمل الوثائق الداعمة برامج مثال لـ STM32، Arduino، 51 UART، Windows C++، و Matlab لمساعدة المطورين في تطبيق المنتج باستخدام الدروس التعليمية وعينات الشيفرة.
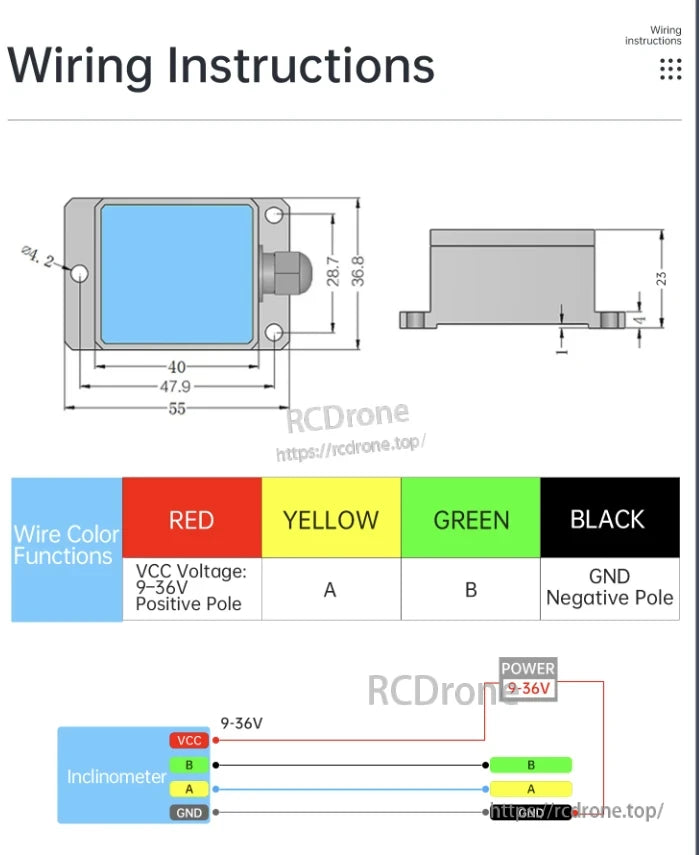
دليل توصيل WitMotion HWT601 AGV IMU: الأحمر (9-36V)، الأصفر (A)، الأخضر (B)، الأسود (GND). تم توفير الأبعاد ومخطط الاتصال.

WitMotion HWT601 AGV IMU للطائرات بدون طيار، القيادة الذاتية، الروبوتات المتنقلة، ومركبات اللوجستيات غير المأهولة.
Related Collections








