مستشعر الزاوية ثنائي المحور WitMotion WT1-IMU (مقياس تسارع + مقياس ميل)، جهد 3.3–5 فولت TTL، دقة 0.5°، تردد إخراج 20 هرتز
مستشعر الزاوية ثنائي المحور WitMotion WT1-IMU (مقياس تسارع + مقياس ميل)، جهد 3.3–5 فولت TTL، دقة 0.5°، تردد إخراج 20 هرتز
WitMotion
تعذر تحميل توفر الالتقاط
نظرة عامة
WitMotion WT1-IMU هو مستشعر زاوية مزدوج المحاور بتكلفة فعالة للغاية يقوم بدمج بيانات مقياس التسارع/الجيروسكوب/المغناطيسية مع خوارزمية قائمة على فلتر كالمان لإخراج زاوية X/Y في الوقت الحقيقي. يعمل الوحدة من 3.3–5 فولت، ويتواصل عبر TTL تسلسلي، ومبني على لوحة دوائر مطبوعة مدمجة مطلية بالذهب لسهولة التكامل مع SMT. دقة الزاوية النموذجية هي ±0.5° (X & Y) مع معدل عودة افتراضي قدره 20 هرتز. يوفر البرنامج الرسمي على الكمبيوتر لوحات معلومات، ومعايرة، وتسجيل، وتصدير؛ تدعم SDK/أمثلة MATLAB وPython وRaspberry Pi وSTM32 وROS وArduino وC/C#.
الميزات الرئيسية
-
إخراج زاوية مزدوجة المحاور (X، Y) لقياس الوضع/الإمالة
-
فلتر كالمان + خوارزمية دمج WitMotion لتحقيق استقرار عالٍ
-
الإمداد: 3.3–5 فولت , TTL UART; LDO مدمج
-
الدقة: ±0.5° (X & Y)
-
نطاق الزاوية: X ±180°, Y ±90°
-
معدل العودة الافتراضي: 20 هرتز (قابل للتكوين في البرمجيات)
-
استهلاك التيار: نموذجي ~5 مللي أمبير، <10 مللي أمبير
-
مضغوط 15.24 × 15.24 مم وحدة؛ ثقوب ختم مطلية بالذهب
-
برنامج كمبيوتر مجاني: لوحة التحكم، المعايرة، إعدادات النطاق/البود، تسجيل البيانات &وتشغيلها، تصدير إلى TXT/BIN/PLAY/XLS
-
ملحقات/تركيبات: محول USB إلى TTL اختياري وتركيب اختبار للحرق السهل
المواصفات
| البند | القيمة |
|---|---|
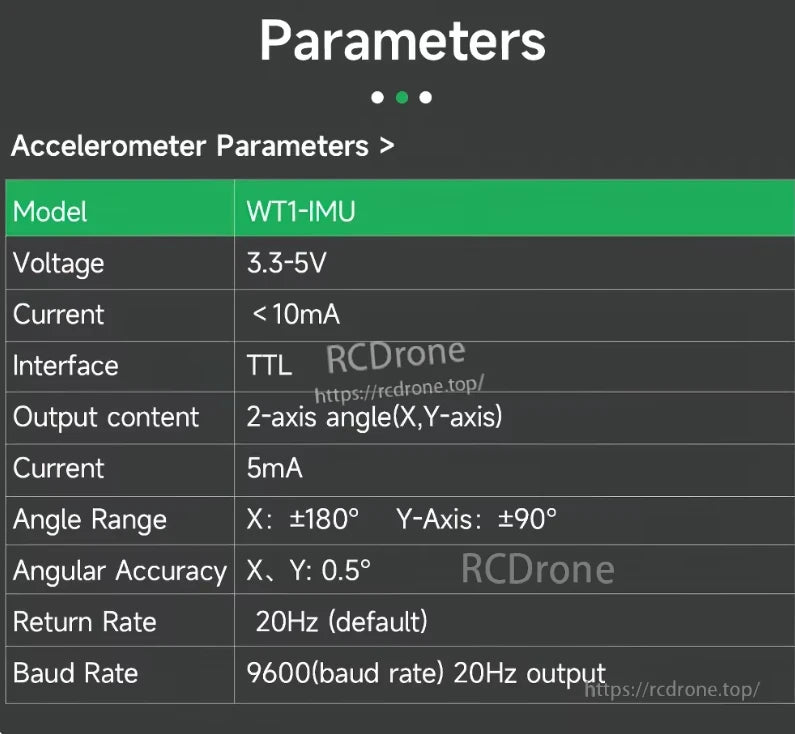
| الموديل | WT1-IMU |
| الجهد | 3.3–5 فولت |
| واجهة | TTL UART |
| محتوى الإخراج | زاوية المحورين (X, Y) |
| نطاق الزاوية | X: ±180°؛ Y: ±90° |
| دقة الزاوية | X/Y: ±0.5° |
| معدل العودة الافتراضي | 20 هرتز |
| معدل البود | 9600 (20 هرتز إخراج افتراضي) |
| التيار | عادة 5 مللي أمبير؛ <10 مللي أمبير |
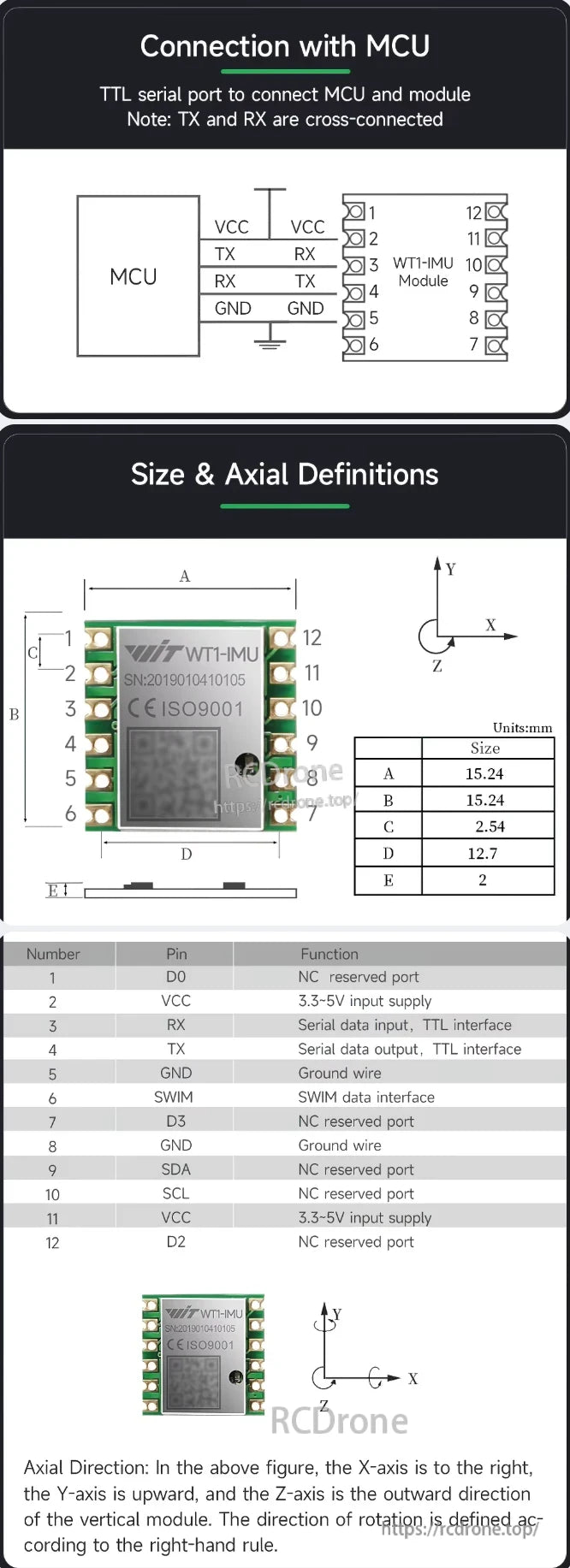
الأبعاد & والمحاور
| الحجم (مم) | القيمة |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (الارتفاع) | 2 |
تعريف المحور: X إلى اليمين، Y إلى الأعلى، Z إلى الخارج من اللوحة؛ الدوران يتبع قاعدة اليد اليمنى.
توزيع الدبابيس (12 دبوس ثقب ختم)
| رقم. | دبوس | وظيفة |
|---|---|---|
| 1 | D0 | NC (محجوز) |
| 2 | VCC | 3.3–5 فولت إدخال |
| 3 | RX | بيانات تسلسلية إدخال (TTL) |
| 4 | TX | بيانات تسلسلية إخراج (TTL) |
| 5 | GND | الأرض |
| 6 | SWIM | واجهة بيانات SWIM |
| 7 | D3 | NC (محجوز) |
| 8 | GND | الأرض |
| 9 | SDA | NC (محجوز) |
| 10 | SCL | NC (محجوز) |
| 11 | VCC | 3.3–5 فولت إدخال |
| 12 | D2 | NC (محجوز) |
اتصال MCU: تسلسلي TTL؛ توصيل متقاطع TX↔RX (MCU-TX → WT1-IMU RX، MCU-RX → WT1-IMU TX)، VCC و GND مشترك.
البرمجيات &وتطويرها
-
لوحة التحكم: عرض مباشر للزاوية، التسارع، السرعة الزاوية، المجال المغناطيسي، الكواتيرنيون، إلخ.
-
قائمة الإعدادات: تسارع &ومعايرة مغناطيسية، اتجاه التثبيت، تردد الإخراج/عرض النطاق، معدل البود، وضع السكون.
-
التسجيل/التصدير: تسجيل سريع وتصدير إلى TXT/BIN/PLAY أو لصق في Excel (XLS).
-
الأدوات: أمثلة/SDKs لـ MATLAB، بايثون، Raspberry Pi، STM32، ROS، Arduino، C/C#.
-
تركيب اختبار اختياري لتفليش/تشغيل سهل.
التطبيقات النموذجية
عرض رأس مدمج، تتبع الحركة، الروبوتات، AGV/UGV، القيادة بدون طيار، مراقبة الموقف في التعدين/الأبراج/الصناعات، معدات الأتمتة، البحث والتطوير للطائرات المأهولة R&D، مراقبة السلامة، والمزارع الذكية/المؤتمتة.
التفاصيل

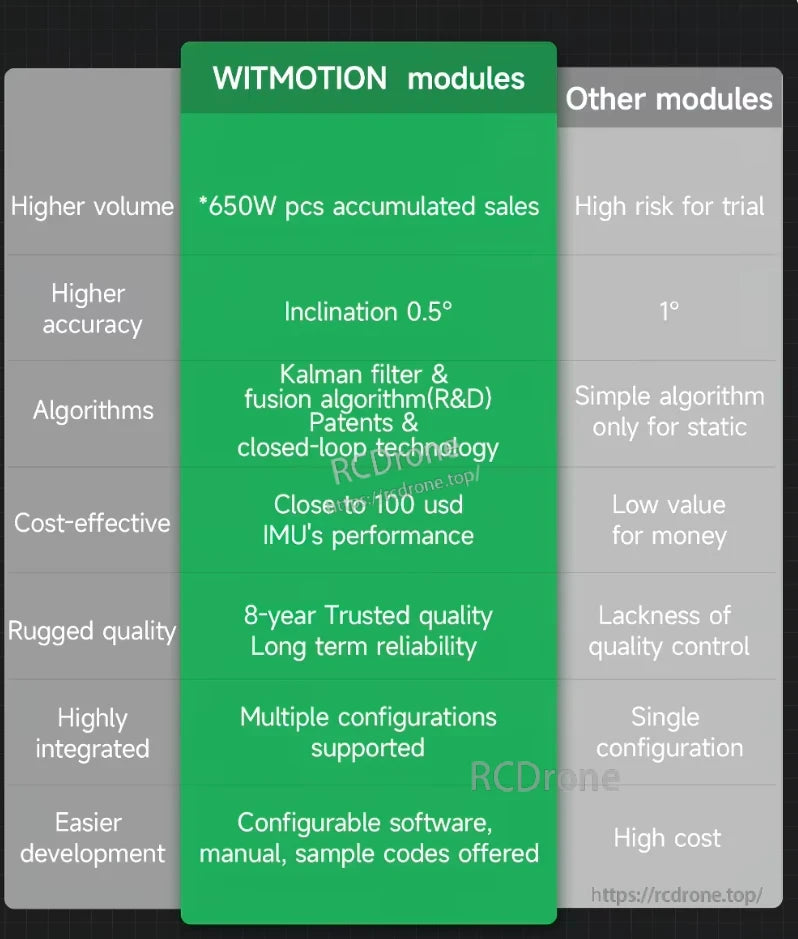
مستشعر زاوية مزدوج المحاور، فعال من حيث التكلفة، مستقر، مع خوارزمية فلتر كالمان، معتمد من ISO9001.
WT1-IMU مقياس تسارع يعمل بجهد 3.3-5V، <10mA تيار، واجهة TTL. يخرج زوايا المحورين (X: ±180°، Y: ±90°) بدقة 0.5°. معدل العودة الافتراضي 20Hz، معدل البود 9600.
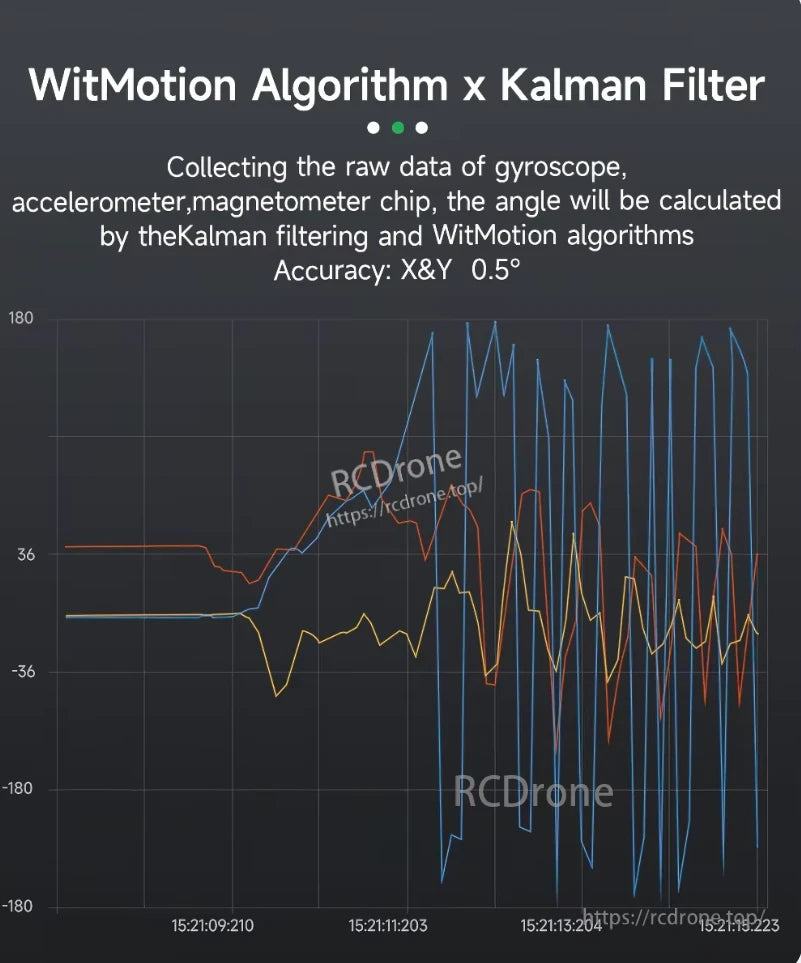
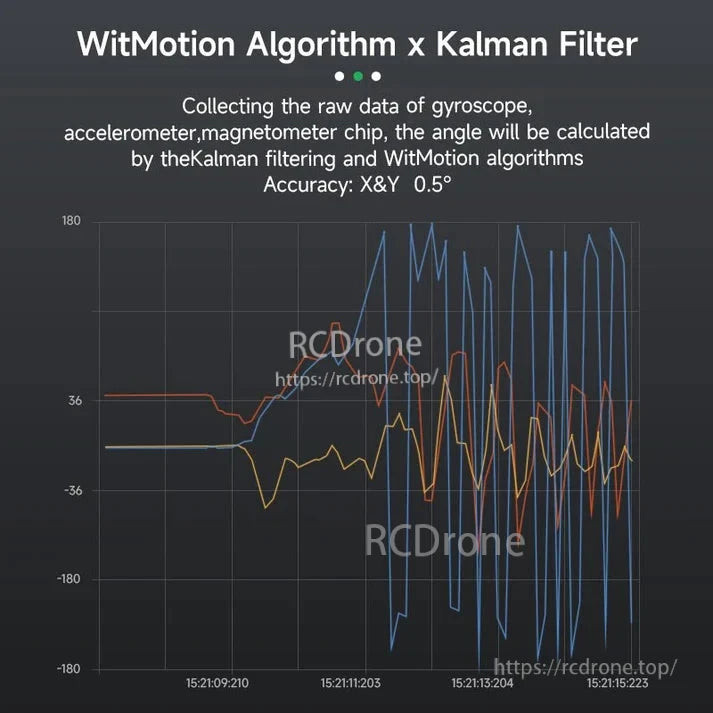
خوارزمية WitMotion x فلتر كالمان. تجمع البيانات الخام من الجيروسكوب، ومقياس التسارع، ومقياس المغناطيسية. تحسب الزاوية باستخدام تصفية كالمان وخوارزميات WitMotion. الدقة: X&Y 0.5°.
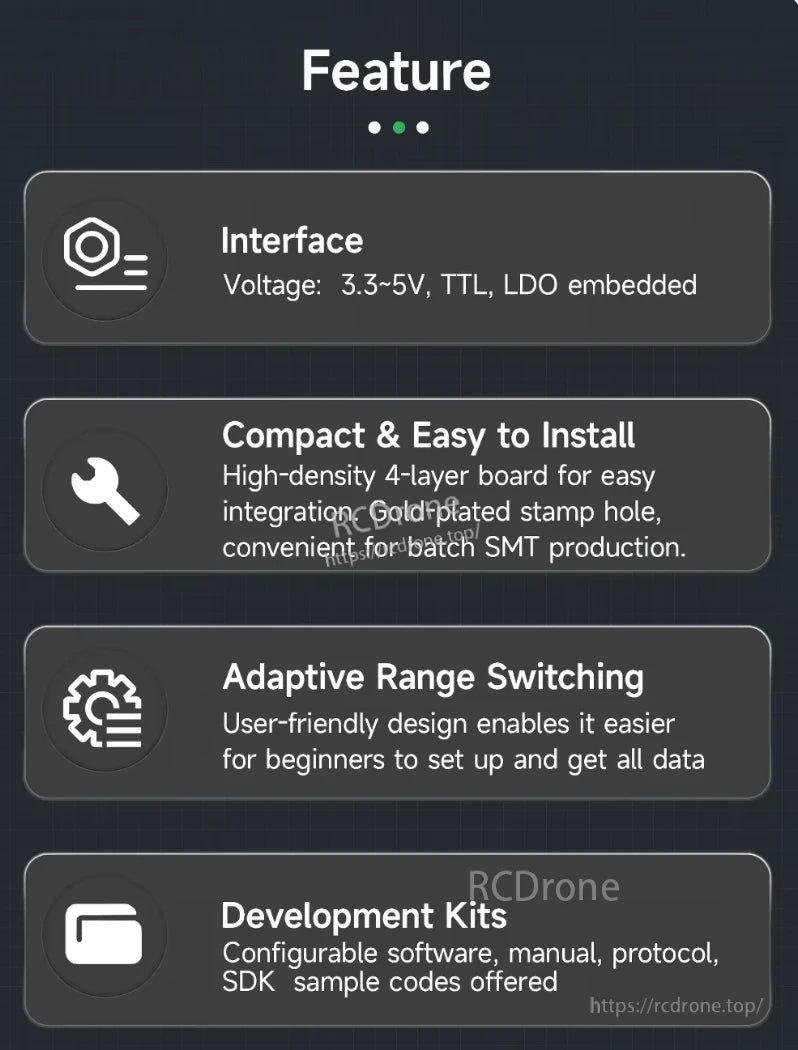
واجهة: 3.3~5 فولت، TTL، LDO مدمج. مدمجة & سهلة التركيب مع لوحة ذات كثافة عالية من 4 طبقات وفتحات مطلية بالذهب. تبديل نطاق تكيفي للمبتدئين. تشمل مجموعات التطوير البرمجيات، والدليل، والبروتوكول، وSDK، وأكواد عينة.
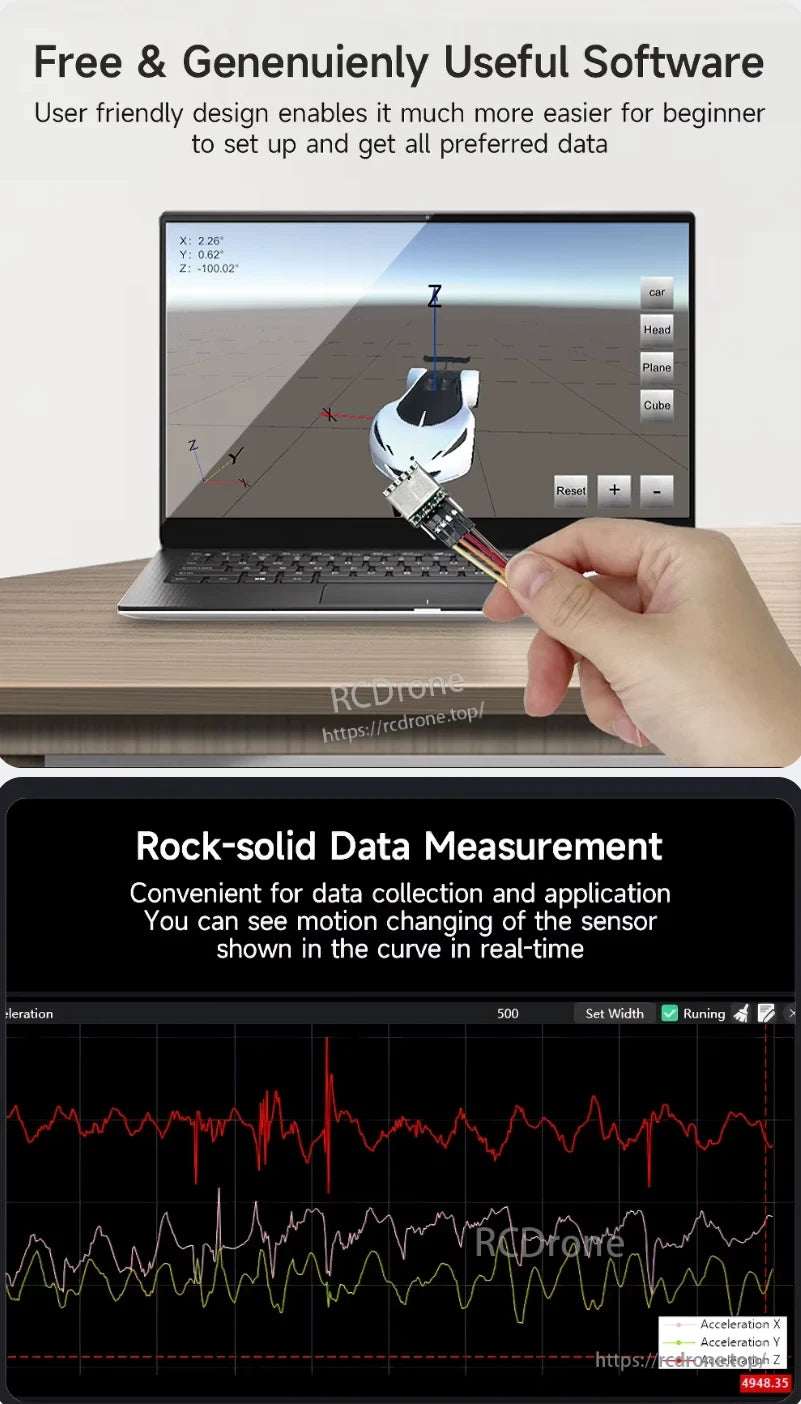
برامج مجانية &ومفيدة حقًا تقدم تصميمًا سهل الاستخدام لإعداد سهل واسترجاع البيانات. تتبع الحركة في الوقت الحقيقي مع قياسات بيانات قوية تعرض تغييرات التسارع في محاور X و Y و Z عبر منحنيات ديناميكية.
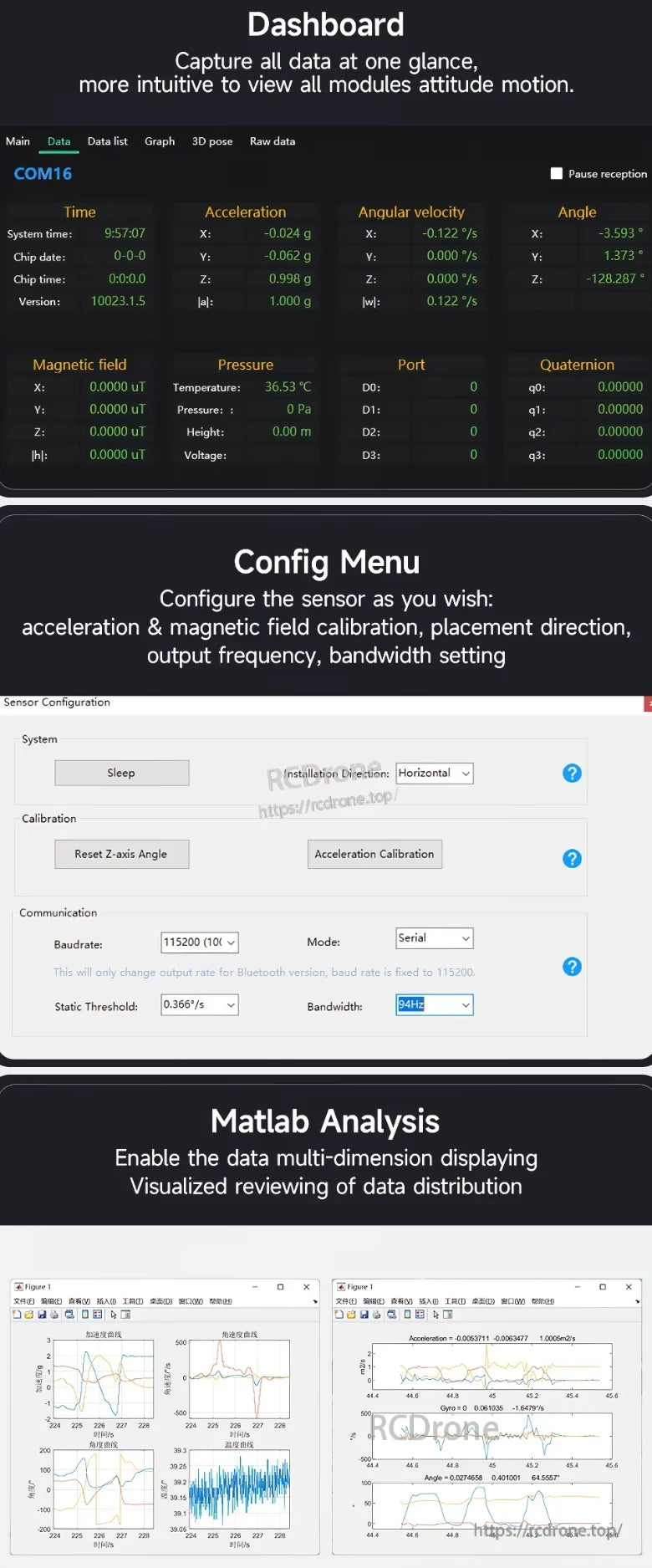
تظهر لوحة التحكم بيانات المستشعر في الوقت الحقيقي بما في ذلك التسارع، السرعة الزاوية، الزاوية، المجال المغناطيسي، الضغط، والكم. يتيح قائمة التكوين المعايرة، اتجاه التثبيت، معدل البود، وإعدادات عرض النطاق الترددي. تحليل Matlab يمكّن من تصور البيانات متعددة الأبعاد.
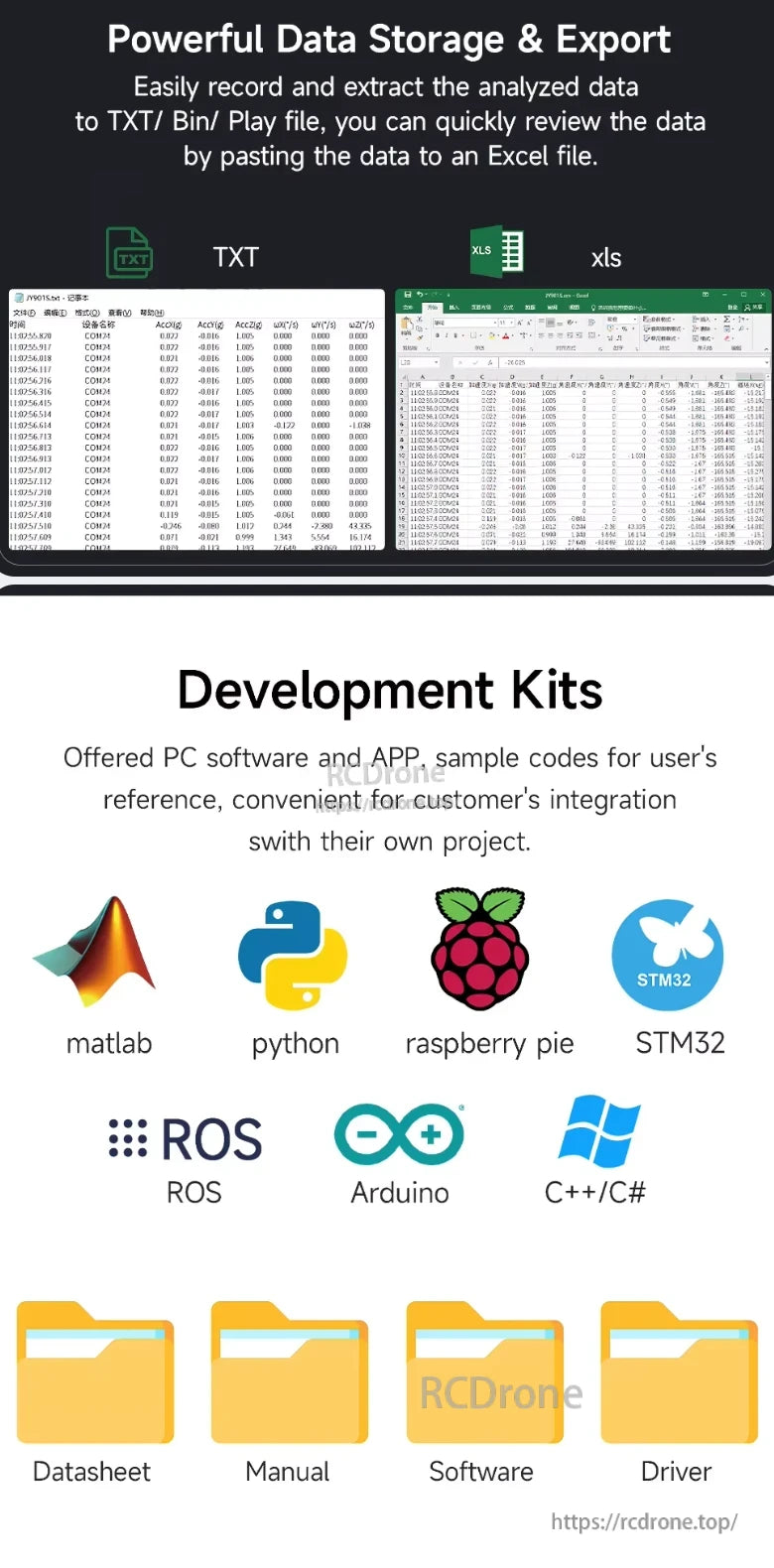
تخزين بيانات قوي وتصدير إلى ملفات TXT، BIN، أو Play؛ متوافق مع MATLAB، Python، Raspberry Pi، STM32، ROS، Arduino، C++/C#. يتضمن ورقة بيانات، دليل، برنامج، وسائق لتسهيل التكامل.
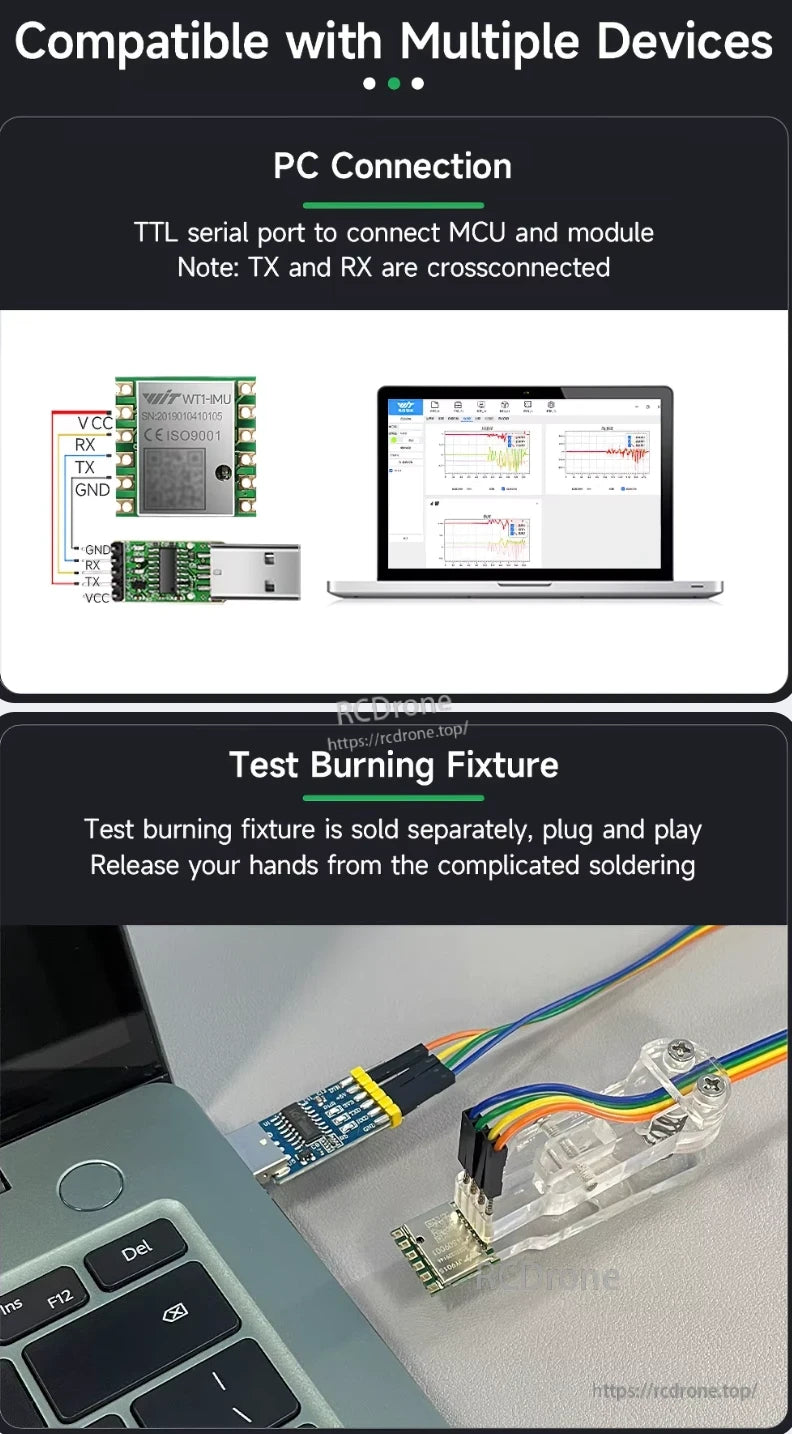
يدعم WitMotion WT1-IMU الاتصال بالكمبيوتر عبر منفذ تسلسلي TTL مع توصيل متقاطع لـ TX و RX.متوافق مع أجهزة متعددة. يتم بيع جهاز اختبار الاحتراق بشكل منفصل، توصيل وتشغيل لإعداد سهل دون لحام.
يقدم مستشعر الزاوية ثنائي المحور WitMotion WT1-IMU اتصال تسلسلي TTL، تخطيط 12 دبوس، حجم مدمج 15.24×15.24×2.54 مم، محاور وفقًا لقانون اليد اليمنى، ويشمل دبابيس VCC و GND و TX و RX و SWIM و SDA و SCL.

تطبيقات مستشعر IMU: التعدين، الزراعة، الروبوتات، الأبراج، الأتمتة، الطائرات بدون طيار، التتبع، المراقبة.
Related Collections