ويت موشن WT61 IMU (MPU6050) – مقياس تسارع وجيروسكوب 6 محاور مع إخراج زاوية، كالمان AHRS، تسلسل TTL، 20/100 هرتز، 3.3–5 فولت لأردوينو/راسبيري باي/كمبيوتر
ويت موشن WT61 IMU (MPU6050) – مقياس تسارع وجيروسكوب 6 محاور مع إخراج زاوية، كالمان AHRS، تسلسل TTL، 20/100 هرتز، 3.3–5 فولت لأردوينو/راسبيري باي/كمبيوتر
WitMotion
تعذر تحميل توفر الالتقاط
نظرة عامة
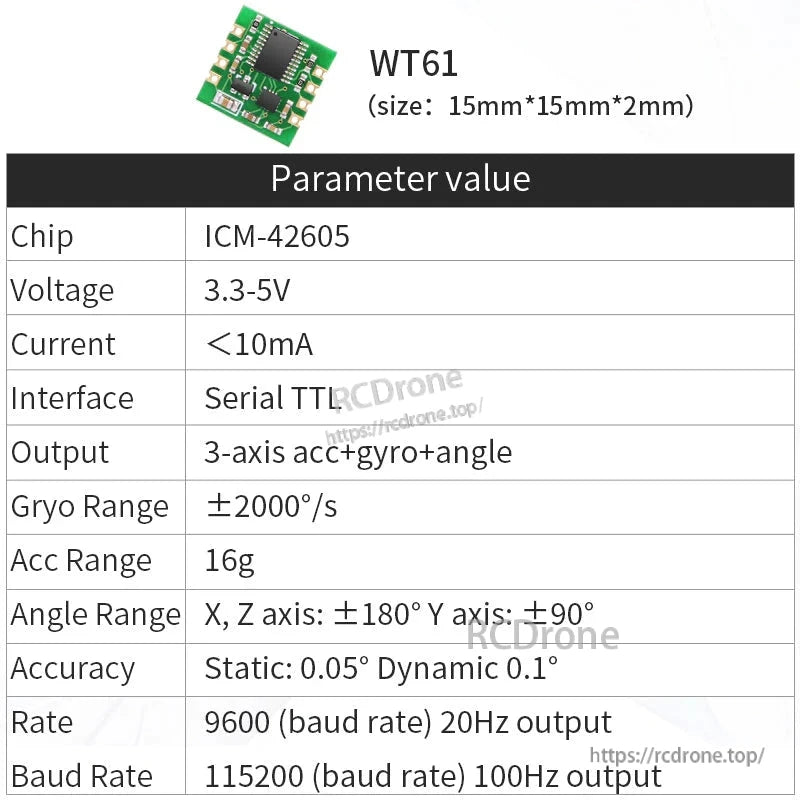
جهاز WitMotion WT61 هو مستشعر وضعية MEMS ذو 6 محاور يقوم بإخراج تسارع ثلاثي المحاور، وسرعة زاوية ثلاثية المحاور، وزاوية مدمجة (دوران/ميل/انحراف). يستخدم وحدة تحكم دقيقة بتردد 48 ميجاهرتز مع وحدة قياس تسارع مدمجة (MPU6050، حسب تسمية الطراز) وتقنية الدمج الديناميكي من WitMotion + تصفية كالمان لتقديم استقرار عالٍ، وضوضاء منخفضة، ونتائج دقيقة للزوايا. يتواصل الوحدة عبر سيريال TTL وهي صغيرة الحجم (15.24 × 15.24 × 2 مم، ~1 جرام)، مما يجعل من السهل تضمينها في أجهزة إنترنت الأشياء، والروبوتات، والآلات المتنقلة، ومراقبة الهياكل، والإلكترونيات الاستهلاكية، وأجهزة الواقع الافتراضي.
الميزات الرئيسية
-
3 مخرجات: تسارع، سرعة زاوية، وزاوية (وضعية).
-
خوارزمية الدمج: دمج ديناميكي + تصفية كالمان; تراث خوارزمية وضعية من الدرجة الفضائية؛ دقة الزاوية 0.05° (ثابتة)، 0.1° (ديناميكية).
-
أجهزة عالية الجودة: 48 ميجاهرتز وحدة المعالجة المركزية، شريحة طاقة مستقرة، وسادات نحاسية مغمورة بالذهب، مستشعر MEMS مدمج.
-
صغيرة &وخفيفة: 15.24 × 15.24 × 2 مم، ~1 غرام; دعم التركيب الأفقي/الرأسي.
-
معدلات بيانات قابلة للاختيار &ومعدل البود: 20 هرتز / 100 هرتز معدل العودة؛ 9600 / 115200 بت في الثانية.
-
تطبيق أندرويد + برنامج ويندوز: رسم بياني في الوقت الحقيقي، تسجيل، عرض البيانات الخام، تصدير TXT، عارض عرض ثلاثي الأبعاد، وتكوين غني (عرض النطاق الترددي، معدل الإخراج، الموضع، العتبات، وضع السكون، إعادة تعيين المحور Z).
-
مجموعة تطوير البرمجيات &وأمثلة: Matlab، Python، Raspberry Pi، STM32، ROS، Arduino، C/C++.
-
وثائق &وأدوات: ورقة بيانات، دليل، MiniIMU.exe، برامج تشغيل CH340/CP2102، مقاطع فيديو توضيحية.
-
الجودة & والدعم: تقرير المعايرة من المصنع موضح؛ RoHS ، CE ، ISO 9001 .
المواصفات الفنية
| البند | التفاصيل |
|---|---|
| الموديل / العلامة التجارية | WT61 / WitMotion |
| جهد الإمداد | 3.3 فولت ~ 5 فولت |
| التيار | &أقل من 10 مللي أمبير |
| واجهة | TTL تسلسلي |
| محتوى الإخراج | تسارع ثلاثي المحاور، سرعة زاوية ثلاثية المحاور، زاوية |
| نطاق التسارع | ±2/±4/±8/±16 جرام (تكييفي) |
| نطاق الجيروسكوب | ±2000 درجة/ثانية |
| نطاق الزاوية | X، Z: ±180°؛ Y: ±90° |
| دقة الزاوية | X/Y ثابت 0.05°؛ ديناميكي 0.1° |
| الاستقرار (الانحياز) | التسارع: 0.01 جرام؛ الجيروسكوب: 0.05 درجة/ثانية؛ الزاوية (XY): 0.01° |
| معدل الإرجاع | 20 هرتز / 100 هرتز |
| معدل البود | 9600 / 115200 بت في الثانية |
| دقة التسارع | ±2 ج: 0.061 ملغ/LSB (16384 LSB/ج); ±4 ج: 0.12 ملغ/LSB (8192 LSB/ج); ±8 ج: 0.25 ملغ/LSB (4096 LSB/ج); ±16 ج: 0.5 ملغ/LSB (2048 LSB/ج) |
| الحجم / الوزن | 15.24 × 15.24 × 2 مم (0.6″ × 0.6″ × 0.08″) / ~1 غرام |
| درجة حرارة التشغيل | –40 °C إلى +85 °C |
| تعريف المحور | إحداثيات كارتيسية، قاعدة اليد اليمنى |
| تركيب | أفقي أو عمودي |
تخطيط الدبابيس & ميكانيكي
مخطط اللوحة (مم): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
الدبابيس:
| # | الاسم | الوظيفة |
|---|---|---|
| 1 | D0 | NC محجوز |
| 2 | VCC | 3.3–5 فولت |
| 3 | RT | بيانات تسلسلية إدخال، مستوى TTL |
| 4 | TX | بيانات تسلسلية إخراج، مستوى TTL |
| 5 | GND | الأرض |
| 6 | SWIM | واجهة بيانات SWIM |
| 7 | D2 | NC محجوز |
| 8 | VCC | 3.3–5 فولت |
| 9 | سلك التحكم في البيانات (SCL) | غير متصل محجوز |
| 10 | سلك البيانات (SDA) | غير متصل محجوز |
| 11 | الأرضي (GND) | الأرضي |
| 12 | D3 | غير متصل محجوز |
توصيلات وحدة التحكم الدقيقة (الرسم البياني موضح): تسلسل TTL إلى وحدة التحكم الدقيقة المضيفة مع TX↔RX متقاطعة (VCC، TX، RX، GND).
البرمجيات، التطبيقات &وأدوات
-
تطبيق أندرويد: الاتصال عبر USB إلى TTL + OTG الهاتف؛ مخططات في الوقت الحقيقي لمقياس التسارع/الجيروسكوب/الزاوية؛ زر التسجيل; قائمة الوحدات (3 محاور / 6 محاور / 9 محاور / BLE5.0 / WT901-WIFI)؛ صفحات الإعدادات الغنية (معايرة التسارع، اتجاه التثبيت، معدل الاسترجاع، عرض النطاق الترددي للقياس، عتبة الكشف الثابت، اختيار النمط).
-
كمبيوتر ويندوز (MiniIMU.exe): مقاييس الزاوية الحية، منحنيات في الوقت الحقيقي (“قياس بيانات موثوق به تمامًا”), تخزين البيانات &وتصديرها (بيانات خام ومحللة إلى تنسيق TXT/CSV)، قائمة الإعدادات (معدل البود 115200، الوضع=سلسلة، اختيار الاتجاه، عرض النطاق e.g., 94 هرتز، وضع السكون، إعادة تعيين المحور Z إلى 0°).
-
عرض ثلاثي الأبعاد: تصور حركة المستشعر؛ يتم تقديم كود المصدر ثلاثي الأبعاد (كما هو موضح).
-
جهاز الاختبار: مشبك قابل للتوصيل والتشغيل لتوصيل الأسلاك بدون لحام (يتم بيعه بشكل منفصل).
الخوارزميات &والأداء
-
خوارزمية ويت موشن × فلتر كالمان: مستمدة من طرق تحديد وضع الأقمار الصناعية في الفضاء; تجمع بين دمج الحركة، التصفية الرقمية، تقدير الحالة؛ تقدم 0.05°/0.1° دقة الزاوية وثبات الانحياز الممتاز/انخفاض الضوضاء (المخطط والشعارات المعروضة).
التطبيقات النموذجية
أجهزة إنترنت الأشياء، مراقبة البيئة، حماية هياكل المباني، الروبوتات &والأتمتة، النفط &والطاقة، الآلات المتنقلة، صناعة التعدين، الإلكترونيات الاستهلاكية، أجهزة الواقع الافتراضي.
الامتثال &والدعم
-
الشهادات المعروضة: تقرير المعايرة، RoHS، CE، ISO 9001.
-
ملاحظات البطاقة المقارنة: تم اختبارها في المصنع قبل الشحن، SDK متاح، ضمان لمدة 12 شهرًا، دعم فني مدى الحياة من WitMotion R&D.
ملاحظات &والملحقات
-
المضمنة: وحدة WT61.
-
اختياري: محول USB إلى TTL، محول OTG للهاتف، جهاز اختبار مشبك.
-
استخدم نظام الإحداثيات اليد اليمنى واتبع اتجاهات التثبيت الأفقية/الرأسية الموضحة في البرنامج للحصول على أفضل دقة.
التفاصيل

يوفر WitMotion WT61 IMU دقة في الميل تبلغ 0.05 درجة، وتصفية رقمية، وخوارزمية دمج، ويشمل ميزات التسارع، والجيروسكوب، والزوايا، والاهتزاز، ووحدة التحكم الدقيقة، والتصفية.

يوفر WitMotion WT61 IMU مخرجات تسارع ثلاثي المحاور، وجيروسكوب، وزوايا. يدعم 3.3V-5V، تيار منخفض، تسلسل TTL، نطاق تكيفي ±2/4/8/16g، دقة عالية، حجم مدمج، وزن خفيف، ونطاق درجة حرارة واسع.

يوفر WitMotion WT61 IMU دقة عالية مع تصفية كالمان، والشهادات تشمل RoHS، CE، ISO-9001.ميزات 48MHz MCU، مستشعر MEMS، شريحة طاقة مستقرة، وواجهة نحاسية مغمورة بالذهب.

خوارزمية WitMotion x مرشح كالمان. تنشأ خوارزمية WitMotion من خوارزمية تحديد وضعية الأقمار الصناعية في الفضاء، مع دمج تصفية كالمان ودمج الحركة الديناميكية. دقة الزاوية: المحور X و Y: 0.05° (ثابت)، 0.1° (ديناميكي). يعرض الرسم البياني بيانات الزاوية على مر الزمن، مع خطوط زرقاء وحمراء وصفراء تمثل قياسات مختلفة أو مخرجات مصفاة. تتراوح الطوابع الزمنية من 15:21:09:210 إلى 15:21:15:223. يمتد المحور العمودي من -180 إلى 180 درجة.

WitMotion WT61 IMU لإنترنت الأشياء، مراقبة البيئة، الروبوتات، الأتمتة، التعدين، الجسور، أجهزة الواقع الافتراضي، والتطبيقات الصناعية.

يوفر WitMotion IMU دقة عالية، استقرار، حجم مدمج، مكونات متفوقة، SDK، اختبار المصنع، ودعم مدى الحياة.يتضمن تصفية كالمان، خوارزمية الدمج، وضمان لمدة 12 شهرًا، متفوقًا على الآخرين.

تتميز وحدة قياس الحركة WitMotion WT61 بتخطيط مكون من 12 دبوسًا مع VCC، GND، TX، RX، SCL، SDA، SWIM، ومنافذ محجوزة؛ تشمل تفاصيل الحجم بالمليمتر.

تتصل وحدة قياس الحركة WitMotion WT61 عبر USB إلى محول OTG لعرض بيانات الهاتف الذكي وتسجيلها. تطبيق أندرويد متعدد الوظائف يعرض بيانات المستشعر في الوقت الحقيقي، بما في ذلك الزوايا، التسارع، والطوابع الزمنية، مع خيارات للتكوين وتسجيل البيانات.

تقدم وحدة قياس الحركة WitMotion WT61 إعدادًا سهلاً، ووظيفة التوصيل والتشغيل، وقياسات وضعية في الوقت الحقيقي مع قراءات الزوايا.

تقدم وحدة قياس الحركة WitMotion WT61 المعايرة، والقياس في الوقت الحقيقي، وتصدير البيانات. تعرض وتخزن التسارع، السرعة الزاوية، المجال المغناطيسي، والبيانات الخام بتنسيق TXT.

تُظهر العروض التوضيحية ثلاثية الأبعاد حركة المستشعر بشكل بديهي. يدعم SDK Matlab و Python و Raspberry Pi و STM32 و ROS و Arduino و C++/C#. اتصال تسلسلي TTL مع MCU؛ يتم توصيل TX و RX بشكل متقاطع.

تُصور العروض التوضيحية ثلاثية الأبعاد حركة المستشعر باستخدام نماذج السيارة والخوذة والمكعب والطائرة بدون طيار. يدعم SDK Matlab و Python و Raspberry Pi و STM32 و ROS و Arduino و C++/C#. الاتصال التسلسلي عبر TTL يربط بين MCU والوحدة مع توصيل TX و RX بشكل متقاطع.

تشمل اختبارات IMU منصة دوارة ثلاثية المحاور، واهتزازات، وظروف حرارة متطرفة، وعمر، وتقييمات درجات الحرارة العالية.


تقدم WitMotion WT61 IMU معدل عائد يتراوح بين 20-100 هرتز، جهد 3.3-5 فولت، وتستشعر التسارع، والزوايا، والجيروسكوب. تدعم واجهة TTL، ومتوافقة مع Android و PC و MCU و Arduino.