












مستشعر WitMotion WT901C-485 بتسعة محاور IMU، جيروسكوب، بوصلة رقمية (RS485/RS232/TTL)، دقة زاوية 0.05°، تردد AHRS من 0.2 إلى 200 هرتز
مستشعر WitMotion WT901C-485 بتسعة محاور IMU، جيروسكوب، بوصلة رقمية (RS485/RS232/TTL)، دقة زاوية 0.05°، تردد AHRS من 0.2 إلى 200 هرتز
RCDrone
تعذر تحميل توفر الالتقاط
نظرة عامة
جهاز WitMotion WT901C-485 هو جهاز IMU AHRS مدمج ذو 9 محاور يعتمد على مجموعة مستشعرات ثلاثية المحاور من فئة MPU9250 (مستشعر تسارع + جيروسكوب + مغناطيسية) وخوارزمية دمج/كالمان من WitMotion. يوفر مخرجات الزاوية، التسارع، السرعة الزاوية، المجال المغناطيسي، والكوارتز بدقة ثابتة XY تبلغ 0.05° (ديناميكية 0.1°) ومعدل تحديث قابل للتعديل من 0.2–200 هرتز. واجهات مادية متعددة (RS485/RS232 Modbus &و TTL UART) ونطاقات إدخال واسعة تجعل WT901C-485 سهل الدمج مع Arduino/STM32/MCUs، أجهزة الكمبيوتر، ووحدات التحكم الصناعية. يوفر البرنامج الرسمي لنظام Windows (MiniIMU.exe) رسومات في الوقت الحقيقي، عرض ثلاثي الأبعاد، تسجيل/تصدير البيانات، ومعايرة مغناطيسية بصرية.
الميزات الرئيسية
-
مخرجات 9 محاور: الزاوية (التدحرج/الانحدار/الزاوية)، 3 محاور تسارع/جيروسكوب/مغناطيسية، الكوارتز.
-
استقرار عالي &ودقة: XY 0.05° ثابت، 0.1° ديناميكي; استقرار التسارع 0.01 g.
-
مدخلات/مخرجات مرنة: TTL / RS232 / RS485 (Modbus); سرعة 4,800–230,400 (افتراضي 9,600).
-
معدل قابل للتعديل: 0.2–200 هرتز (افتراضي 10 هرتز).
-
إمداد واسع: TTL 3.3–5 فولت، RS232/RS485 5–36 فولت; <25 مللي أمبير نموذجي.
-
أدوات &ومجموعات تطوير البرمجيات: تطبيق ويندوز، تطبيق أندرويد، برامج تشغيل CH340/CP2102، كود عينة لـ C/C++/STM32/Arduino/Matlab.
-
معايرة مغناطيسية &وعرض ثلاثي الأبعاد للإعداد الأولي؛ مخططات حية وتصدير TXT.
-
التصميم الصناعي: –40~85 °C، 51×36×15 مم، تركيب عمودي أو أفقي.
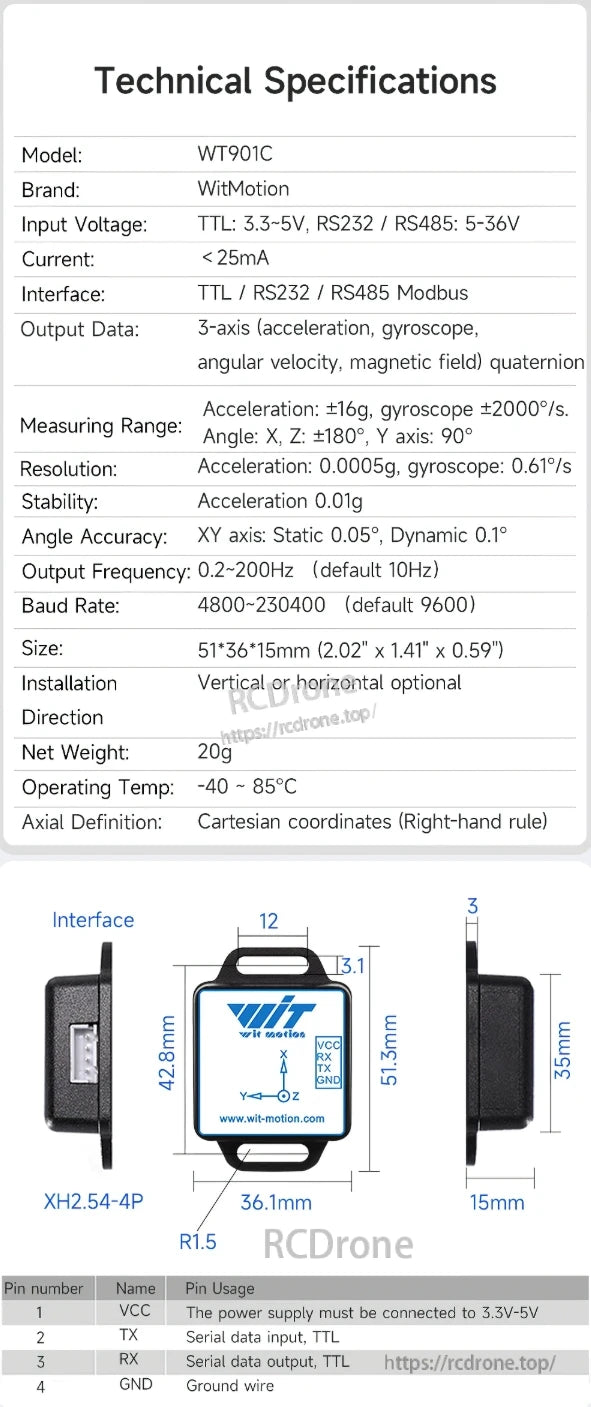
المواصفات الفنية
| البند | المواصفات |
|---|---|
| النموذج | WT901C (نسخة WT901C-485) |
| الواجهات | TTL / RS232 / RS485 (Modbus) |
| جهد الإدخال | TTL: 3.3–5 فولت; RS232/RS485: 5–36 فولت |
| التيار | < 25 مللي أمبير |
| بيانات الإخراج | التسارع، السرعة الزاوية، المجال المغناطيسي، الزاوية، كواتيرنيون |
| نطاقات القياس | التسارع ±16 ج، الجيروسكوب ±2000 °/ث; الزاوية: X,Z ±180°، Y 90° |
| الدقة | التسارع 0.0005 ج، الجيروسكوب 0.61 °/ث |
| الاستقرار | التسارع 0.01 ج |
| دقة الزاوية | XY ثابت 0.05°، ديناميكي 0.1° |
| تردد الإخراج | 0.2–200 هرتز (افتراضي 10 هرتز) |
| معدل البود | 4,800–230,400 (افتراضي 9,600) |
| الحجم / الوزن | 51×36×15 مم, 20 جرام |
| درجة حرارة التشغيل | –40 ~ 85 °م |
| المحاور | كارتesian، قاعدة اليد اليمنى |
| التثبيت | عمودي أو أفقي |
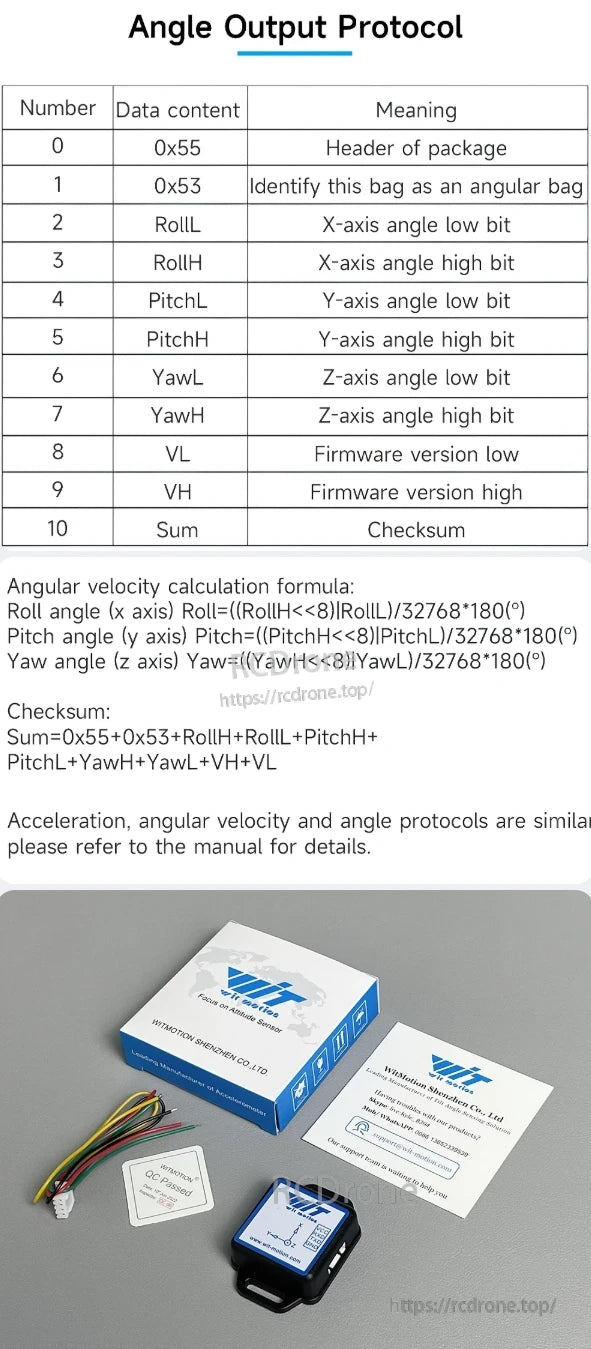
إطار الزاوية (0x55 0x53) – بروتوكول الإخراج
| فهرس البايت | المحتوى | المعنى |
|---|---|---|
| 0 | 0x55 | رأس الحزمة |
| 1 | 0x53 | معرف إطار "الزاوية" |
| 2–3 | RollL/RollH | زاوية المحور السيني (منخفضة/مرتفعة) |
| 4–5 | PitchL/PitchH | زاوية المحور الصادي (منخفضة/مرتفعة) |
| 6–7 | YawL/YawH | زاوية المحور الزيدي (منخفضة/مرتفعة) |
| 8 | VL | إصدار البرنامج الثابت المنخفض |
| 9 | VH | إصدار البرنامج الثابت المرتفع |
| 10 | المجموع | Checksum |
فك تشفير الزاوية
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
مجموع التحقق
المجموع = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(إطارات التسارع والسرعة الزاوية تتبع نفس نمط التخطيط - انظر الدليل.)
الأبعاد &والموصل
حجم العلبة: 51 × 36 × 15 مم (ارتفاع × عرض × عمق)، مع آذان تركيب؛ الوزن ≈ 20 جرام.
الموصل: XH2.54-4P (رأس اللوحة على المستشعر).
توزيع الدبابيس (نسخة TTL)
| الدبوس | الاسم | الوصف |
|---|---|---|
| 1 | VCC | مدخل الطاقة 3.3–5 فولت |
| 2 | TX | إدخال بيانات تسلسلي، مستوى TTL |
| 3 | RX | إخراج بيانات تسلسلي، مستوى TTL |
| 4 | GND | الأرض |
ملاحظات: استخدم مستويات TTL للتكامل المباشر مع MCU. تستخدم متغيرات RS232/RS485 مستويات جهدها ومعايير الأسلاك الخاصة بها.
البرمجيات &وأدوات
-
MiniIMU.exe (ويندوز): التكوين (الخوارزمية، اتجاه التثبيت، النطاقات، عرض النطاق الترددي)، الرسوم البيانية في الوقت الحقيقي، عرض البيانات الخام/السداسي، تسجيل البيانات و تصدير TXT.
-
عرض ثلاثي الأبعاد: تصور الاتجاه في الوقت الحقيقي (المصدر متاح).
-
معايرة مغناطيسية بصرية: معالج ملاءمة البيضاوي لإزالة التحيز (موصى به للاستخدام الأول).
-
السائقون &والرمز: برامج تشغيل CH340/CP2102؛ أمثلة لـ STM32، Arduino، C/C++، Matlab؛ تطبيق Android؛ مقاطع فيديو توضيحية للكمبيوتر/الهاتف.
التطبيقات النموذجية
الأتمتة والروبوتات، منصات التسوية، مراقبة زاوية الميل، مراقبة الاهتزاز، الإلكترونيات الاستهلاكية، تكامل أنظمة إنترنت الأشياء، الاختبارات الصناعية، سماعات VR/AR.
التفاصيل

وحدة قياس التسارع والمغناطيسية AHRS فعالة من حيث التكلفة بدقة 0.05° في محاور X Y. تشمل ميزات الميل، الاهتزاز، استشعار الوضع باستخدام خوارزمية دمج WitMotion. تتضمن وظائف التسارع، الجيروسكوب، الزاوية، المغناطيسية، تصفية كالمان، ووظائف الكواتيرنيون.
حساس WitMotion WT901C IMU يقدم تسارع ثلاثي المحاور، جيروسكوب، سرعة زاوية، واستشعار المجال المغناطيسي. يدعم واجهات TTL/RS232/RS485، ويتميز بنطاق تسارع ±16g، جيروسكوب ±2000°/ث، دقة زاوية ثابتة 0.05°، ويعمل بين -40°C و 85°C.

حساس WitMotion WT901C IMU يقدم الأتمتة، نظارات الواقع الافتراضي، التسوية، ومراقبة الاهتزاز. تشمل التطبيقات الإلكترونيات الاستهلاكية، تكامل إنترنت الأشياء، الاختبارات الصناعية، والواقع المعزز/الواقع الافتراضي. يوفر البرنامج المجاني قياس موقف سهل الاستخدام مع بيانات الزاوية في الوقت الحقيقي.
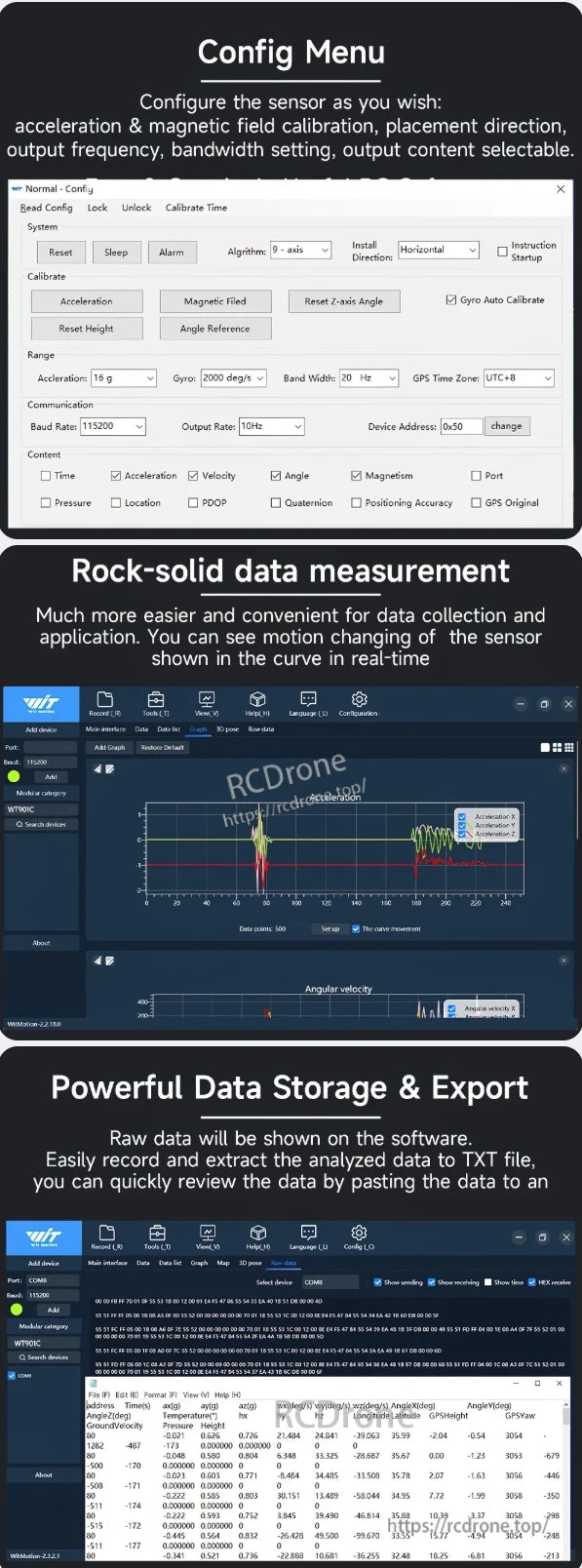
حساس WitMotion WT901C IMU يقدم إعدادات قابلة للتكوين للتسارع، المجال المغناطيسي، والاتجاه. يوفر تصور بيانات في الوقت الحقيقي، قياس قوي، ويدعم تخزين/تصدير البيانات بتنسيق TXT للتحليل.
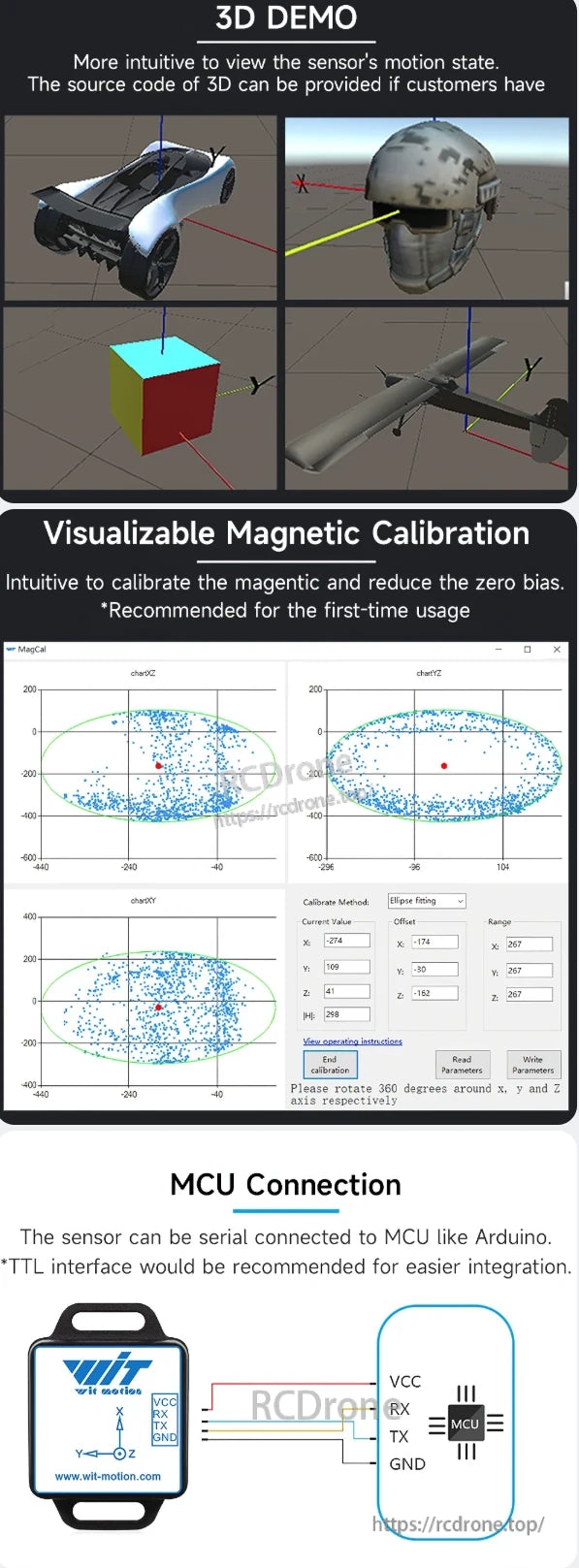
توضح العرض ثلاثي الأبعاد حركة المستشعر باستخدام نماذج السيارة، والخوذة، والمكعب، والطائرة بدون طيار. واجهة المعايرة المغناطيسية تسمح بالتعديل البديهي. تفاصيل اتصال MCU تحتوي على واجهة TTL لـ Arduino، مع دبابيس VCC، RX، TX، GND موضحة.

تتضمن مجموعات التطوير برنامج Windows مجاني، وبرامج تشغيل، وكتيبات، وأكواد عينة لـ STM32، وArduino، وC++، وMATLAB. تحتوي على ملفات PDF، ومقاطع فيديو توضيحية، ودعم تطبيق Android لمستشعر WT901C IMU.
تفاصيل بروتوكول إخراج الزاوية لمستشعر IMU WT901C: هيكل البيانات، الحسابات الزاوية، صيغة التحقق، التعبئة. تحتوي على زوايا التدحرج، والارتفاع، والدوران، وإصدار البرنامج الثابت، وصيغة التحقق.
Related Collections












