









مستشعر WitMotion WT901C AHRS IMU بتسعة محاور — مقياس تسارع، جيروسكوب، مقياس مغناطيسي مع زاوية & كواتيرنيون، دقة 0.05°، تردد 0.2–200 هرتز، دعم TTL/RS232/RS485 Modbus
مستشعر WitMotion WT901C AHRS IMU بتسعة محاور — مقياس تسارع، جيروسكوب، مقياس مغناطيسي مع زاوية & كواتيرنيون، دقة 0.05°، تردد 0.2–200 هرتز، دعم TTL/RS232/RS485 Modbus
WitMotion
تعذر تحميل توفر الالتقاط
نظرة عامة
جهاز WitMotion WT901C هو وحدة IMU AHRS مدمجة بزاوية 9 تجمع بين مستشعر تسارع ثلاثي المحاور، وجيروسكوب ثلاثي المحاور، ومغناطيس ثلاثي المحاور مع تقنية دمج/تصفية كالمان من WitMotion لإخراج الزوايا (التدحرج/الانحدار/الزاوية)، السرعة الزاوية، التسارع، المجال المغناطيسي، والكمية الرباعية. يوفر دقة ثابتة XY تبلغ 0.05° (0.1° ديناميكي)، ويدعم معدلات تحديث تتراوح بين 0.2–200 هرتز، ويتواصل عبر TTL، RS232، أو RS485 (Modbus)—مثالي لقياس الميل، الاهتزاز، والموقف في الأتمتة، منصات التسوية، الواقع الافتراضي/المعزز، والاختبارات الصناعية.
الميزات الرئيسية
-
دقة عالية في AHRS: دقة ثابتة XY 0.05°، ديناميكية 0.1°؛ محاور كارتيسية يمنى.
-
مدخلات ومخرجات واسعة &و جهد: TTL 3.3–5 فولت، RS232/RS485 5–36 فولت، سرعة الباود 4 800–230 400 (الإعداد الافتراضي 9 600).
-
إخراج قابل للتكوين: 0.2–200 هرتز (الإعداد الافتراضي 10 هرتز)؛ محتويات قابلة للاختيار من قبل المستخدم.
-
بيانات كاملة بزاوية 9: تسارع، سرعة زاوية، مجال مغناطيسي، زاوية &و كواتيرنيون.
-
أدوات التصور: برنامج Windows MiniIMU مع رسوم بيانية في الوقت الحقيقي، تسجيل/تصدير البيانات الخام (TXT)، عرض حركة ثلاثية الأبعاد، و معايرة مغناطيسية بصرية.
-
موارد المطورين: برامج تشغيل (CH340/CP2102)، كتيبات/ورقة بيانات، كود عينة لـ 51/C++/STM32/Arduino/Matlab، و تطبيق أندرويد.
-
تركيب مرن: تركيب عمودي أو أفقي؛ حجم مدمج 51 × 36 × 15 مم، ~20 جرام.
html
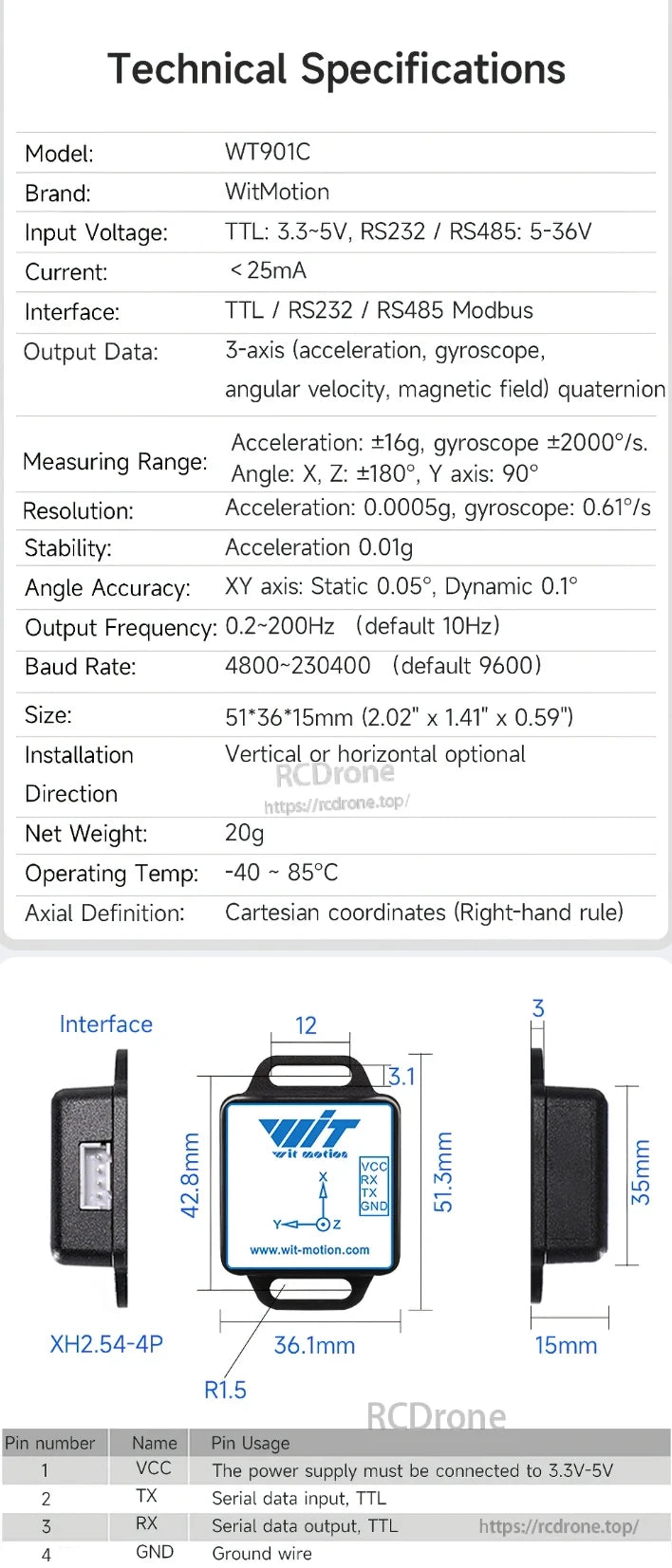
المواصفات الفنية
-
الموديل/العلامة التجارية: WT901C / WitMotion
-
الواجهات: TTL / RS232 / RS485 (Modbus)
-
جهد الإدخال: TTL: 3.3–5 فولت؛ RS232/RS485: 5–36 فولت
-
التيار: < 25 مللي أمبير
-
بيانات الإخراج: تسارع ثلاثي المحاور ، جيروسكوب (سرعة الزاوية)، مجال مغناطيسي، زاوية، كواتيرنيون
-
نطاق القياس: تسارع ±16 ج; جيروسكوب ±2000 °/ث; زاوية X,Z ±180°، Y 90°
-
الدقة: تسارع 0.0005 ج; جيروسكوب 0.61 °/ث
-
الاستقرار: تسارع 0. 01 g
-
دقة الزاوية: ثابت XY 0.05°، ديناميكي 0.1°
-
تردد الإخراج: 0.2–200 هرتز (افتراضي 10 هرتز)
-
معدل البود: 4 800–230 400 (افتراضي 9 600)
-
الحجم / الوزن: 51 × 36 × 15 مم / ≈ 20 جرام
-
درجة حرارة التشغيل: −40 ~ 85 °م
-
تعريف المحور: إحداثيات كارتيسية، قاعدة اليد اليمنى
الأبعاد &و الموصل (نسخة TTL)
-
الجسم: 51.3 مم (ارتفاع) × 36.1 مم (عرض) × 15 مم (عمق)؛ نصف قطر آذان التركيب R1.5
-
الموصل: XH2.54-4P
-
توصيلات (من اليسار إلى اليمين على الملصق VCC/RX/TX/GND):
-
VCC — الطاقة 3.3–5 فولت
-
TX — إدخال بيانات تسلسلية، TTL
-
RX — إخراج بيانات تسلسلية، TTL
-
GND — الأرض
-
ملاحظة: الرسوم البيانية للمحاور مطبوعة على الهيكل (X↑، Y→، Z•)، مما يساعد على المحاذاة.
بروتوكول إخراج الزاوية (الإطار 0x55 0x53)
| بايت | المحتوى | المعنى |
|---|---|---|
| 0 | 0x55 | رأس |
| 1 | 0x53 | معرف إطار الزاوية |
| 2–3 | RollL/RollH | زاوية المحور X |
| 4–5 | PitchL/PitchH | زاوية المحور Y |
| 6–7 | YawL/YawH | زاوية المحور Z |
| 8–9 | VL/VH | إصدار البرنامج الثابت (منخفض/مرتفع) |
| 10 | المجموع | مجموع الاختبار |
تحويل الزاوية:الدوران = ((RollH<<8)|RollL)/32768*180°الانحدار = ((PitchH<<8)|PitchL)/32768*180°الزاوية = ((YawH<<8)|YawL)/32768*180°
(إطارات التسارع والسرعة الزاوية متشابهة؛ انظر الدليل.html
)
البرمجيات &وأدوات
-
ويندوز (MiniIMU.exe): تكوين الجهاز (النطاقات، عرض النطاق الترددي، معدل الإخراج)، الرسوم البيانية في الوقت الحقيقي، عرض البيانات الخام، تصور الوضع ثلاثي الأبعاد، التصدير إلى TXT.
-
معايرة المغناطيس: سير عمل ملاءمة بيضاوي بصري لتقليل التحيز (الدوران حول X/Y/Z).
-
تكامل MCU: اتصال تسلسلي مباشر؛ يوصى بـ TTL لتوصيل MCU بسيط (Arduino/STM32، إلخ).
-
الموارد المضمنة: Datasheet.pdf، برامج تشغيل CH340 &و CP2102، كود مثال، تطبيق أندرويد، مقاطع فيديو توضيحية.
التطبيقات النموذجية
الأتمتة | مراقبة الميل/المستوى | مراقبة الاهتزاز | تسوية المنصات | تكامل أنظمة إنترنت الأشياء | الاختبار الصناعي | نظارات VR/AR | الإلكترونيات الاستهلاكية.
التفاصيل

وحدة قياس التسارع AHRS IMU فعالة من حيث التكلفة بدقة 0.05° في محوري X و Y. تتميز بالكشف عن الميل والاهتزاز والموقف باستخدام خوارزمية دمج WitMotion. تشمل التسارع، والجيروسكوب، والزوايا، والمغناطيسية، وتصفية كالمان، ووظائف الكواتيرنيون.
وحدة WitMotion WT901C IMU تقدم استشعار ثلاثي المحاور مع التسارع والجيروسكوب والمغناطيس. توفر مخرجات كواتيرنيون. تدعم TTL و RS232 و RS485. تقيس ±16g و ±2000°/s و ±180° زوايا. حجم مدمج 51×36×15 مم. تعمل من -40 إلى 85 درجة مئوية.

وحدة WitMotion WT901C IMU تدعم الأتمتة، ونظارات الواقع الافتراضي، والتسوية، ومراقبة الاهتزاز. تعمل في الإلكترونيات الاستهلاكية، وإنترنت الأشياء، والاختبارات الصناعية، والواقع المعزز/الواقع الافتراضي. تأتي مع برنامج مجاني لعرض بيانات الزوايا في الوقت الحقيقي.

قائمة إعدادات WitMotion WT901C IMU تتيح معايرة المستشعر، إعدادات إخراج البيانات، وتصوير الحركة في الوقت الحقيقي. يدعم خوارزمية 9 محاور، تسارع قابل للتعديل، جيروسكوب، عرض نطاق، ومنطقة زمنية GPS. تظهر الرسوم البيانية في الوقت الحقيقي التسارع والسرعة الزاوية لقياسات دقيقة.
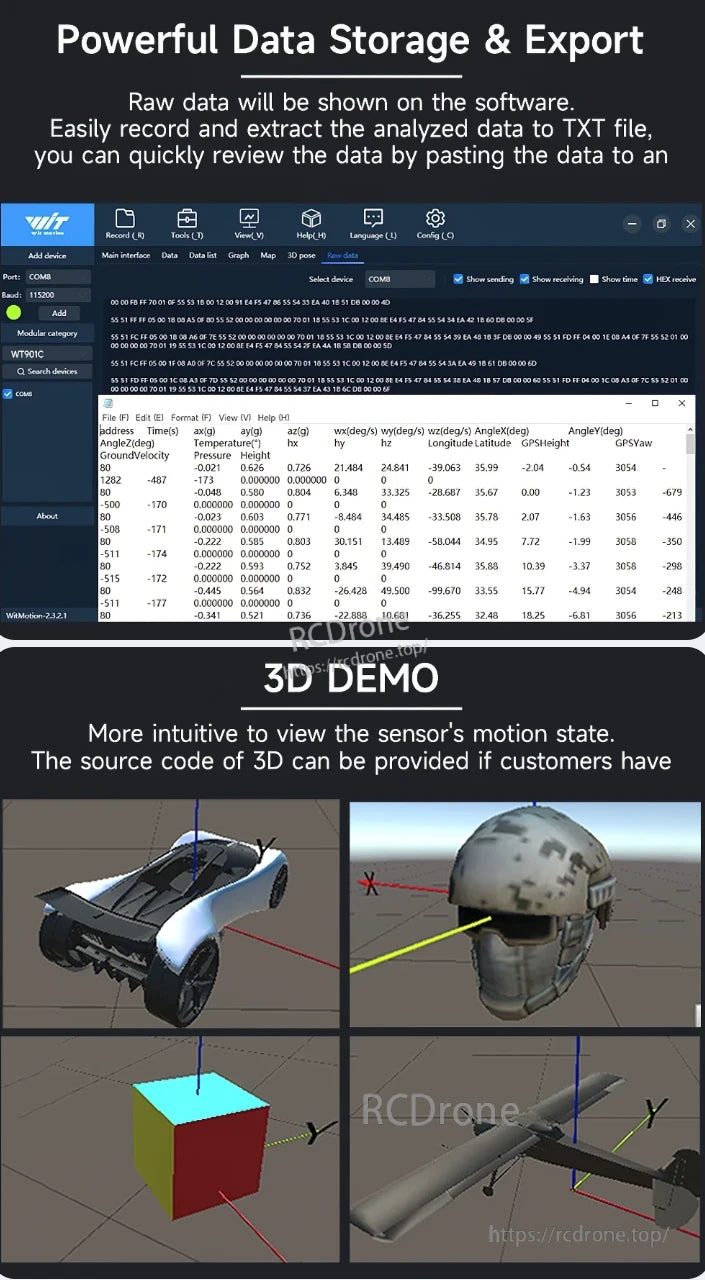
يوفر WitMotion WT901C IMU تخزين بيانات قوي، تصدير TXT سهل، وتصوير الحركة ثلاثي الأبعاد مع كود مصدر متاح.
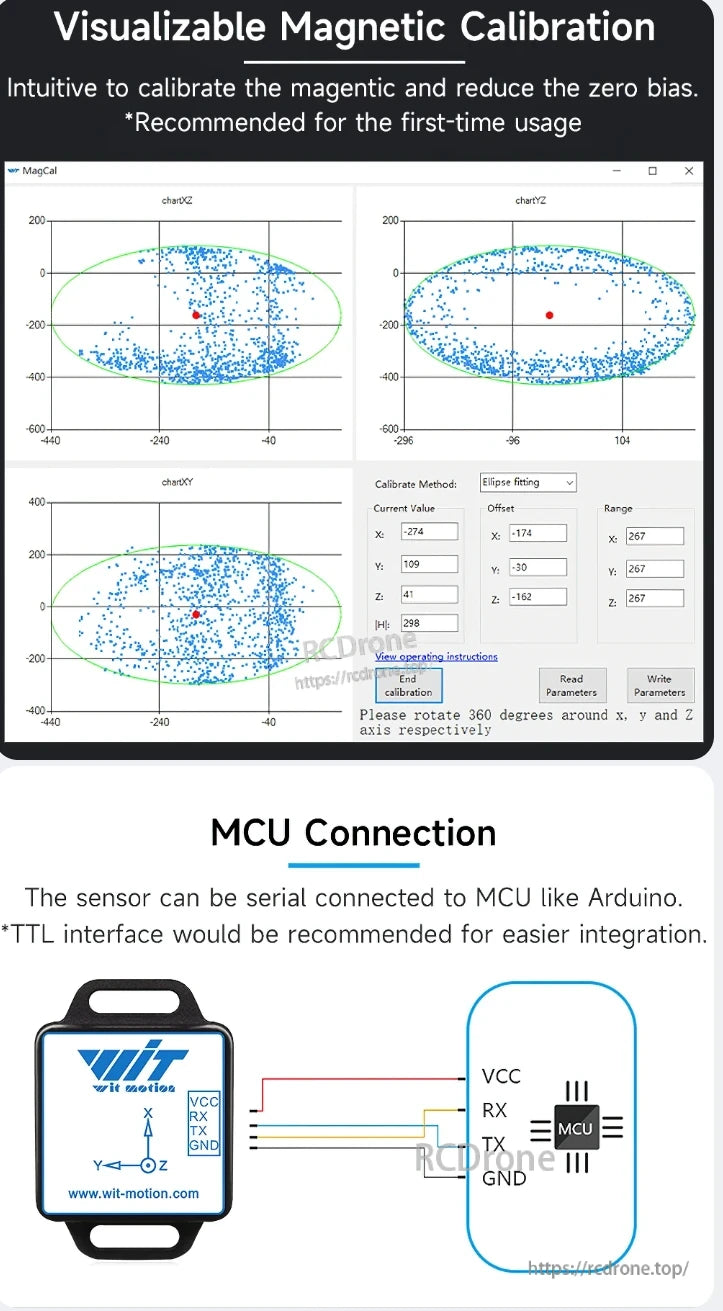
معايرة مغناطيسية قابلة للتصور لـ WT901C IMU باستخدام طريقة ملاءمة الإهليلجي. يُوصى بالاتصال بـ MCU عبر واجهة TTL. يتصل المستشعر بـ MCUs الشبيهة بـ Arduino باستخدام دبابيس VCC و RX و TX و GND.
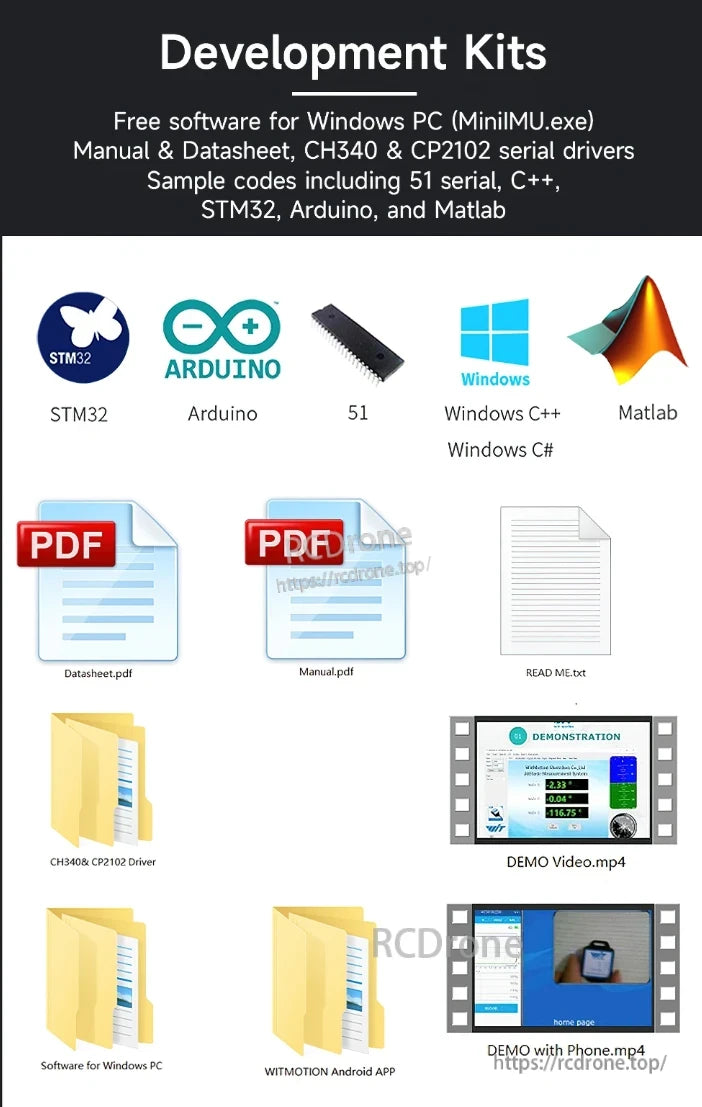
تتضمن مجموعات التطوير برنامجًا مجانيًا لنظام Windows، دليل، ورقة بيانات، برامج تشغيل CH340 & CP2102، أكواد عينة لـ 51، C++، STM32، Arduino، و Matlab، بالإضافة إلى مقاطع فيديو توضيحية وتطبيق Android.
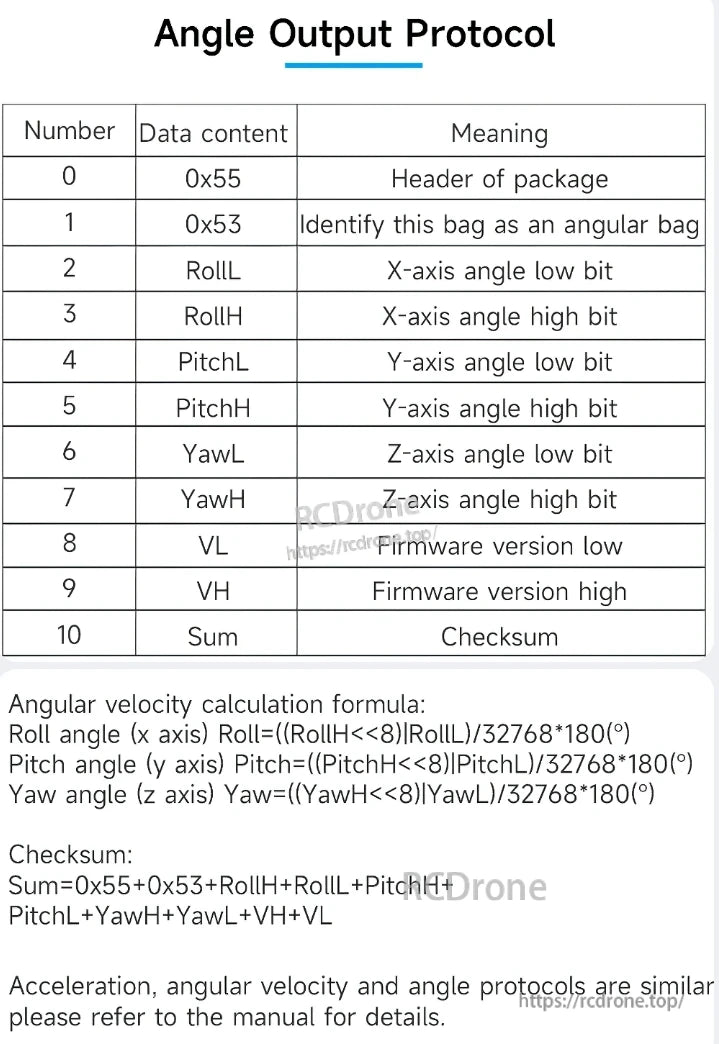
هيكل البيانات لخرج زاوية WT901C IMU يتضمن رأس، ودوران، وزاوية ميل، وزاوية اتجاه، وإصدار البرنامج الثابت، ومجموع الاختبار. تم توفير الصيغ للحسابات والتحقق. توجد هياكل مشابهة للتسارع والسرعة الزاوية.
Related Collections









