



XF D-90DE حامل ثلاثي للطائرة بدون طيار - نظام انحراف ثلاثي المحاور 10x بصري 3x تقريب رقمي EO، كاميرا واسعة، 1.2KM LRF
XF D-90DE حامل ثلاثي للطائرة بدون طيار - نظام انحراف ثلاثي المحاور 10x بصري 3x تقريب رقمي EO، كاميرا واسعة، 1.2KM LRF
XF
تعذر تحميل توفر الالتقاط
ملخص
ال جراب طائرة بدون طيار XF D-90DE هو نظام كاميرا جيمبال متطور مصمم للاستهداف الدقيق والمراقبة. مزود بـ محور ثلاثي المحاور غير متعامد، يتكامل النظام مع كاميرا EO ذات تقريب بصري 10x، أ كاميرا ذات زاوية واسعة، و أ جهاز تحديد المدى بالليزر بمدى قياس يبلغ 1.2 كيلومتر. يسمح تصميمه الذكي بالتبديل السلس بين المراقبة على نطاق واسع والتتبع التفصيلي المكبر، مما يعزز الكفاءة التشغيلية. يتميز اكتشاف وتتبع العديد من الكائنات باستخدام الذكاء الاصطناعي، ال كاميرا طائرة بدون طيار XF D-90DE يضمن التركيز الدقيق والمتواصل على الأهداف المحددة.
يعمل نظام التثبيت المتقدم للمحور والهيكل الكروي المنخفض الارتفاع للنظام على تقليل مقاومة الرياح مع السماح بالدوران المستمر. مع دعم تكوينات التركيب المختلفة والتكامل مع برنامج دراغون فلاي، ال جراب طائرة بدون طيار XF D-90DE توفر الصور والتحكم في الوقت الفعلي، مما يجعلها أداة أساسية لتطبيقات الطائرات بدون طيار.
الميزات الرئيسية
- اكتشاف كائنات متعددة مدعومة بالذكاء الاصطناعي:يقوم بالتعرف على الأشخاص أو المركبات وتتبعها بشكل ذكي في مجال الرؤية.
- تكامل أجهزة الاستشعار الثلاثية:يجمع بين كاميرا EO ذات تقريب بصري 10x، وكاميرا ذات زاوية واسعة، وجهاز تحديد المدى بالليزر لتعزيز التنوع.
- استهداف عالي الدقة:يوفر جهاز تحديد المدى بالليزر موقع الهدف الدقيق والمسافة التي تصل إلى 1.2 كيلومتر.
- انتقال سلس:التبديل بين العرض الواسع والمكبر للحصول على وعي مثالي بالموقف.
- التثبيت المتقدم:يتميز بمحور ثلاثي المحاور بدقة زاوية ±0.01 درجة وسرعة قابلة للتحكم ±200 درجة/ثانية.
- التوافق الشامل:يدعم بروتوكولات MAVLink وUART وS.BUS للتطبيقات المتنوعة.
تحديد
عام
| المعلمة | مواصفة |
|---|---|
| اسم المنتج | طائرة XF D-90DE |
| أبعاد | الحجم: 96.4 × 96 × 147 ملم وحدة معالجة الرسومات: 45.4 × 40 × 13.5 مم |
| وزن | القرنة: 576 جرام وحدة معالجة الرسومات: 18.6 جرام |
| جهد التشغيل | 14 ~ 53 فولت تيار مستمر |
| قوة | Pod: 10.5 واط (متوسط، نطاق إيقاف التشغيل) / 55 واط (توقف التشغيل، نطاق التشغيل) وحدة معالجة الرسومات: 1.8 واط |
| التركيب | إلى الأسفل / إلى الأعلى |
| دقة تحديد موقع الهدف | الخطأ الأفقي: 1.8 متر، الخطأ الرأسي: 0.7 متر @ المسافة الأفقية: 105 متر، الارتفاع النسبي: 75 متر الخطأ الأفقي: 17.4 متر، الخطأ الرأسي: 6.7 متر @ المسافة الأفقية: 513 متر، الارتفاع النسبي: 119 متر الخطأ الأفقي: 33.8 متر، الخطأ الرأسي: 13.7 متر @ المسافة الأفقية: 1003 متر، الارتفاع النسبي: 246 متر |
جيمبال
| المعلمة | مواصفة |
|---|---|
| نوع الجيمبال | تثبيت ميكانيكي غير متعامد بثلاثة محاور |
| الدقة الزاوية | ±0.01 درجة |
| مدى قابل للتحكم | درجة الميل: -150°~+50°، الانحراف: ±360° باستمرار |
| أقصى سرعة يمكن التحكم بها | درجة الميل: ±200 درجة/ثانية، الانحراف: ±200 درجة/ثانية |
كاميرا التكبير
| المعلمة | مواصفة |
|---|---|
| مستشعر الصورة | 1/2.8 بوصة CMOS؛ البكسلات الفعالة: 2.07 مليون بكسل |
| عدسة | البعد البؤري: 4.7~47 مم مجال الرؤية العالي: 61.3 درجة~6.8 درجة مجال الرؤية المتغير: 36.9 درجة~3.9 درجة مجال الرؤية: 68.4 درجة~7.8° |
| دقة | 1920 × 1080 |
| درجة البكسل | 2.9 ميكرومتر |
| معدل التكبير البصري | 10x |
| معدل التكبير الرقمي المكافئ | 3x |
| الحد الأدنى من الإضاءة | الرؤية الليلية متوقفة: 0.01 لوكس / F1.6 الرؤية الليلية: 0.0015 لوكس / F1.6 |
كاميرا واسعة
| المعلمة | مواصفة |
|---|---|
| مستشعر حراري | 1/2.8 بوصة CMOS؛ البكسلات الفعالة: 2.07 مليون بكسل |
| البعد البؤري | 5.1 ملم |
| مجال الرؤية التذبذبي العالي/مجال الرؤية العمودي/مجال الرؤية المتباين | 71.4 درجة / 44.0 درجة / 79.6 درجة |
| دقة | 1920 × 1080 |
| درجة البكسل | 2.9 ميكرومتر |
جهاز تحديد المدى بالليزر
| المعلمة | مواصفة |
|---|---|
| الطول الموجي | 905 نانومتر |
| أقصى قوة ليزر | 1 ميغاواط |
| زاوية الشعاع | 3.5 مراد |
| قطر الشعاع | 0.35 متر عند 100 متر |
| نطاق القياس | 5~1200 متر (سطح عمودي φ12 متر مع انعكاسية 20%) |
اكتشاف وتتبع الكائنات المتعددة باستخدام الذكاء الاصطناعي
| المعلمة | مواصفة |
|---|---|
| حجم الكائن | 16×16 ~ 128×128 بكسل |
| تأخير التعرف على الكائن | <40 مللي ثانية |
| سرعة التتبع | ±32 بكسل / حقل |
| تتبع تأخير إخراج الانحراف | ≤5 مللي ثانية |
الصورة والفيديو
| المعلمة | مواصفة |
|---|---|
| تنسيق الصورة | JPEG |
| الحد الأقصى لدقة الصورة | 1920 × 1080 |
| تنسيق الفيديو | إم بي 4 |
| الحد الأقصى لدقة الفيديو | 1080P@25fps |
تخزين
| المعلمة | مواصفة |
|---|---|
| بطاقات SD المدعومة | فئة السرعة 10 MicroSD، حتى 256 جيجابايت |
بيئة
| المعلمة | مواصفة |
|---|---|
| درجة حرارة التشغيل | -20 درجة مئوية إلى 50 درجة مئوية |
| درجة حرارة التخزين | -40 درجة مئوية إلى 60 درجة مئوية |
| رطوبة التشغيل | ≤85% رطوبة نسبية (بدون تكاثف) |
التطبيقات
ال كاميرا طائرة بدون طيار XF D-90DE يعد هذا النظام مثاليًا للمراقبة الجوية ومهام البحث والإنقاذ وتفتيش البنية التحتية. بفضل تكامله مع ثلاثة أجهزة استشعار وأدائه القوي، فإنه يضمن الأداء الأمثل في سيناريوهات تشغيلية متنوعة.
تقدم شركة Nanjing Xianfei Robot Technology Co., Ltd. جهاز XF D-90DE Triple Drone Pod المزود بمحور ثلاثي المحاور، وهو مثالي لاكتشاف وتتبع العديد من الأشياء، مع إمكانيات تكبير وتحديد المدى بالليزر ثنائي الرؤية، وهو مثالي لتطبيقات المسح والرسم الخرائطي.
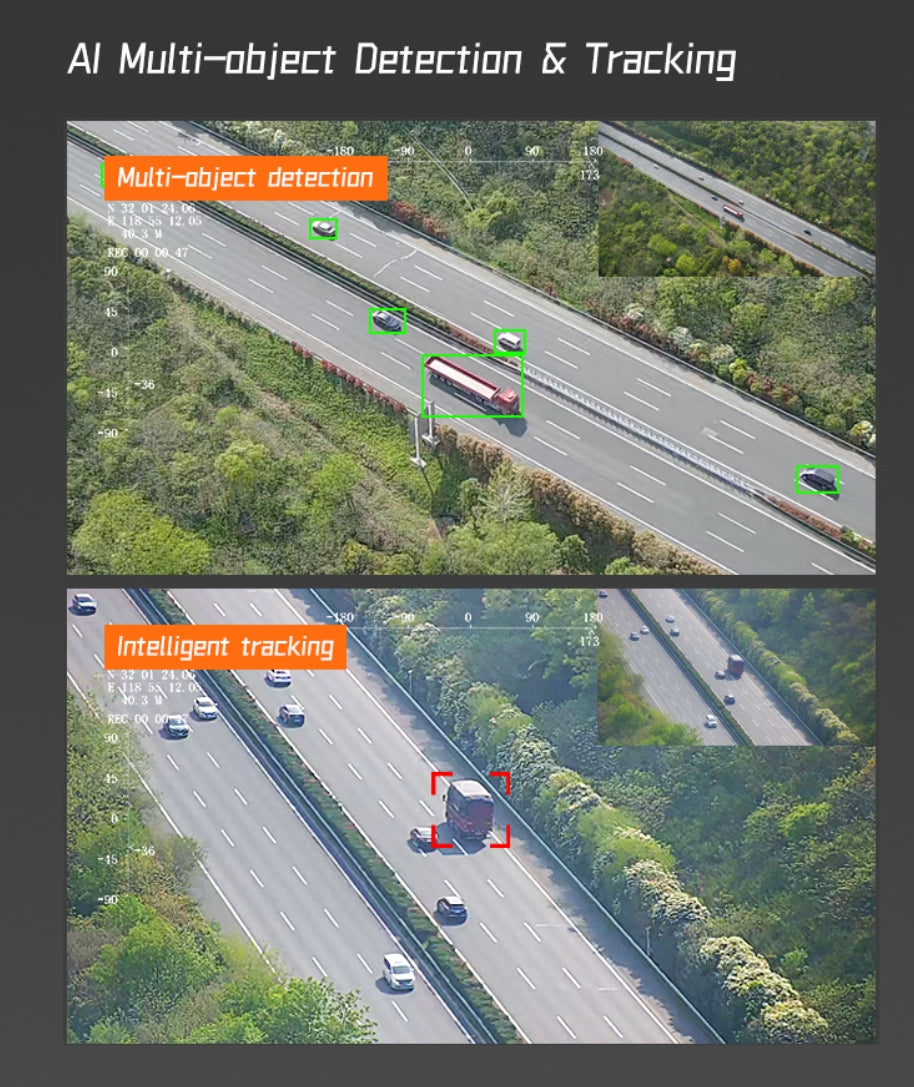
اكتشاف وتتبع العديد من الكائنات: يتتبع بشكل ذكي ما يصل إلى 120 كائنًا على مسافة 48.3L0.

يتميز جراب XF D-90DE الثلاثي للطائرات بدون طيار بمحور ثلاثي المحاور، وتقريب إضافي، وعرض مزدوج، وقدرات تحديد المدى بالليزر.تتميز هذه الكاميرا بمدى تكبير هجين مذهل يصل إلى 118x مع زاوية عرض واسعة تبلغ 149 درجة. وتوفر وحدة الكاميرا J80 صورة عالية الجودة. كما تأتي مع وظيفتي M94 وWro Kun Wsee.

تتميز وحدة XF-D90DE Triple Drone Pod بمحور ثلاثي المحاور للحصول على لقطات جوية سلسة وزاوية رؤية واسعة تصل إلى 180 درجة.

يتميز الشكل الكروي بهيكل ميكانيكي غير متعامد ثلاثي المحاور، مع اختلاف في نصف قطر الدوران بنسبة 25% مقارنة بالهياكل العادية. يتيح هذا التصميم حركات أكثر سلاسة للكاميرا وتقليل الاهتزازات.

تتميز وحدة XF D-90DE Triple Drone Pod بمحور ثلاثي المحاور لالتقاط لقطات سلسة ومستقرة. وهي تدعم أنظمة الطيار الآلي مفتوحة المصدر وتتوافق مع بروتوكول Mavlink، مما يجعلها مناسبة للاستخدام مع مختلف المركبات الجوية الصغيرة.
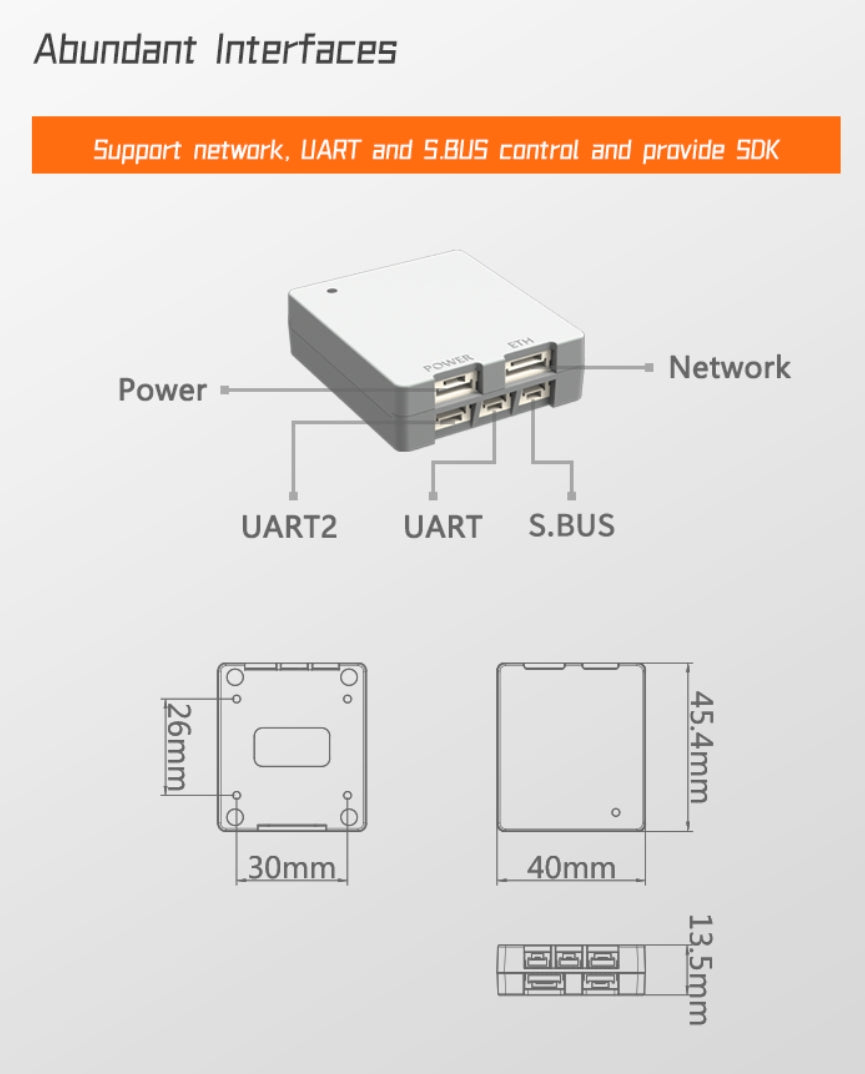
تتميز وحدة Triple Drone Pod ذات المحور الثلاثي بواجهات وفيرة تدعم الشبكة وVART a5 والتحكم في الحافلة وتوفر طاقة شبكة S0K. تحتوي على اتصالات UART2 وS.BUS، بقياس 30 مم × 40 مم.

ضوء واحد، ثابت واحد، قطر الكرة 96 مم، الوزن الإجمالي 576 جرام، دقة التثبيت #D، طائرات بدون طيار صغيرة

تتميز وحدة XF D-90DE Triple Drone Pod بمحور ثلاثي المحاور مع محور Y مستمر يدور بزاوية 360 درجة.


حامل ثلاثي للطائرات بدون طيار XF D-90DE - 3 محاور تثبيت: مراقبة في الوقت الفعلي والتحكم في أجهزة متعددة ومصفوفة وشاشة مقسمة وإدارة عصا التحكم وتقليل ضوضاء Loa. باختصار، تم تصميم هذا المنتج لتعزيز تجربة الطيران بدون طيار بميزاته المتقدمة.



