
















ذراع روبوتية Yahboom DOFBOT SE 6DOF إصدار الجهاز الافتراضي، مجموعة نموذج الذكاء الاصطناعي الكبير ROS2 Humble Python للرؤية الحاسوبية
ذراع روبوتية Yahboom DOFBOT SE 6DOF إصدار الجهاز الافتراضي، مجموعة نموذج الذكاء الاصطناعي الكبير ROS2 Humble Python للرؤية الحاسوبية
Yahboom
تعذر تحميل توفر الالتقاط
نظرة عامة
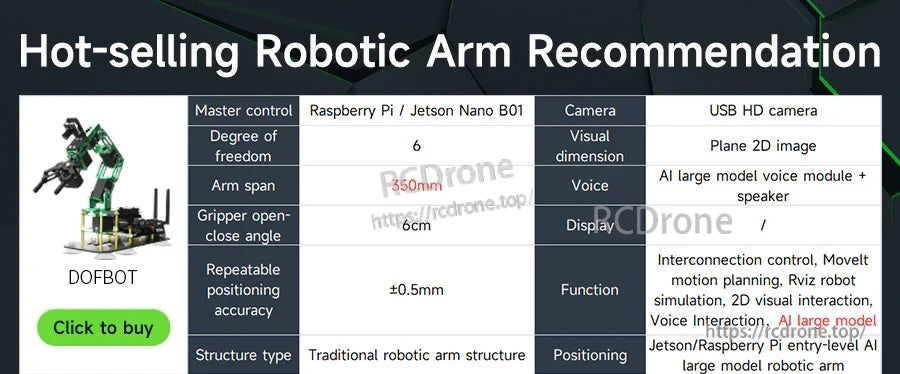
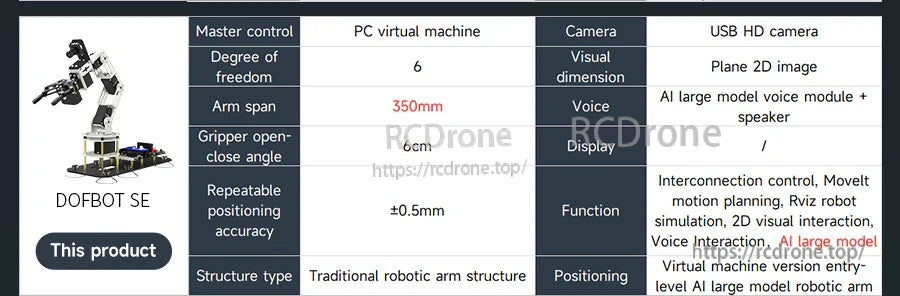
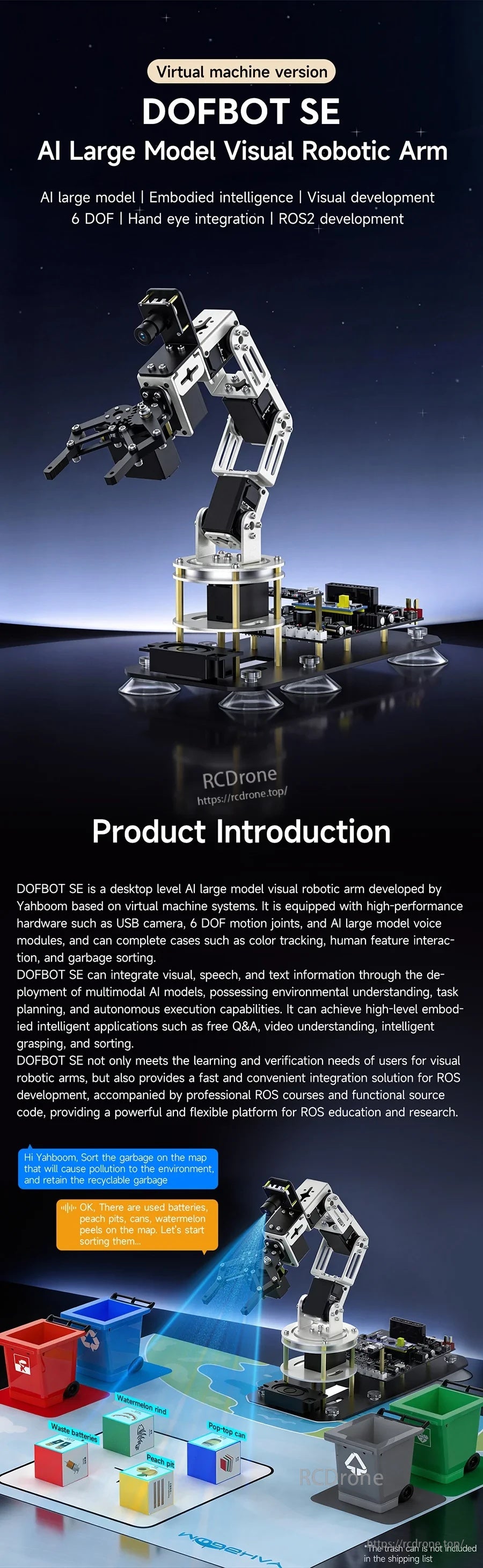
DOFBOT SE هو ذراع روبوتي ذو رؤية AI كبيرة (نسخة الجهاز الافتراضي) من Yahboom. إنه ذراع روبوتي مكتبي ذو 6 درجات حرية يولد قرارات التحكم على جهاز افتراضي على جانب الكمبيوتر الشخصي ويدفع المفاصل من خلال وحدة تحكم STM32. تم تصميم النظام حول ROS2 لدعم الحركيات (الأمامية/العكسية)، تخطيط الحركة، محاكاة MoveIt، واكتشاف التصادم، مع تمكين التفاعل بالرؤية AI لمهام مثل تتبع التعرف على الألوان والإمساك بالأشياء.
الميزات الرئيسية
- التحكم الرئيسي في الجهاز الافتراضي للكمبيوتر الشخصي: يستخدم جهاز افتراضي للكمبيوتر الشخصي ليحل محل لوحات تطوير ARM؛ Mac غير مدعوم.
- تطوير ROS2: نظام التحكم في الروبوت ROS2 (الصورة تحدد ROS2 Humble)، يدعم تخطيط الحركة، المحاكاة، وسير العمل ذات الصلة.
- تحكم في سيرفو الحافلة التسلسلية 6 DOF: تحكم متكامل لحركة متعددة المفاصل والإمساك.
- التفاعل مع رؤية الذكاء الاصطناعي: رؤية ثنائية الأبعاد للطائرة مع وظائف مثل التعرف على الألوان/التتبع/الإمساك والتعرف على الإيماءات.
- التفاعل مع نموذج الذكاء الاصطناعي الكبير (توفر الميزة يعتمد على الإصدار): الصور تصف القدرات متعددة الوسائط (نص/صوت/رؤية) بما في ذلك قاعدة معرفة RAG قابلة للتوسع، حوار صوتي طبيعي، وفهم المشاهد البصرية.
- طرق تحكم متعددة: النص يوضح تطبيق الهاتف المحمول، مقبض لاسلكي، وبرنامج التحكم على الكمبيوتر الشخصي.
المواصفات
| النموذج | DOFBOT SE (نسخة الآلة الافتراضية) |
| التحكم الرئيسي | آلة افتراضية على الكمبيوتر الشخصي |
| درجة الحرية | 6 |
| امتداد الذراع | 350 مم |
| زاوية فتح وإغلاق الماسك | 6 سم |
| دقة التمركز القابلة للتكرار | ±0. |
| نوع الهيكل | هيكل ذراع روبوتي تقليدي |
| كاميرا | كاميرا USB HD |
| البعد البصري | صورة مستوية ثنائية الأبعاد |
| الصوت | وحدة صوت نموذج AI كبير + مكبر صوت |
| عرض | / |
| الوظائف (نص الصورة) | التحكم في الترابط؛ تخطيط حركة MoveIt؛ محاكاة الروبوت Rviz؛ تفاعل بصري ثنائي الأبعاد؛ تفاعل صوتي؛ نموذج AI كبير |
| التحديد (نص الصورة) | ذراع روبوتي نموذج AI كبير للمبتدئين نسخة افتراضية |
| نظام ROS (نص الصورة) | ROS2 Humble |
ملاحظة دقة الكاميرا: يذكر الوصف النصي المقدم 0.كاميرا 3MP, وتشير أيضًا إلى وحدة كاميرا 30MP تحت "تكوين الأجهزة الاحترافية". الصور تحدد كاميرا USB HD ولكن لا تظهر قيمة الميجابيكسل. للتأكيد على وحدة الكاميرا المرسلة بالضبط، اتصل بـ [email protected] أو قم بزيارة https://rcdrone.top/ .
التحكم في &البرمجيات
- التحكم في ROS2: يبسط التحكم في حركة السيرفو التسلسلي ذو 6 درجات حرية؛ يدعم الحل الأمامي، الحل العكسي، وتخطيط الحركة (نص).
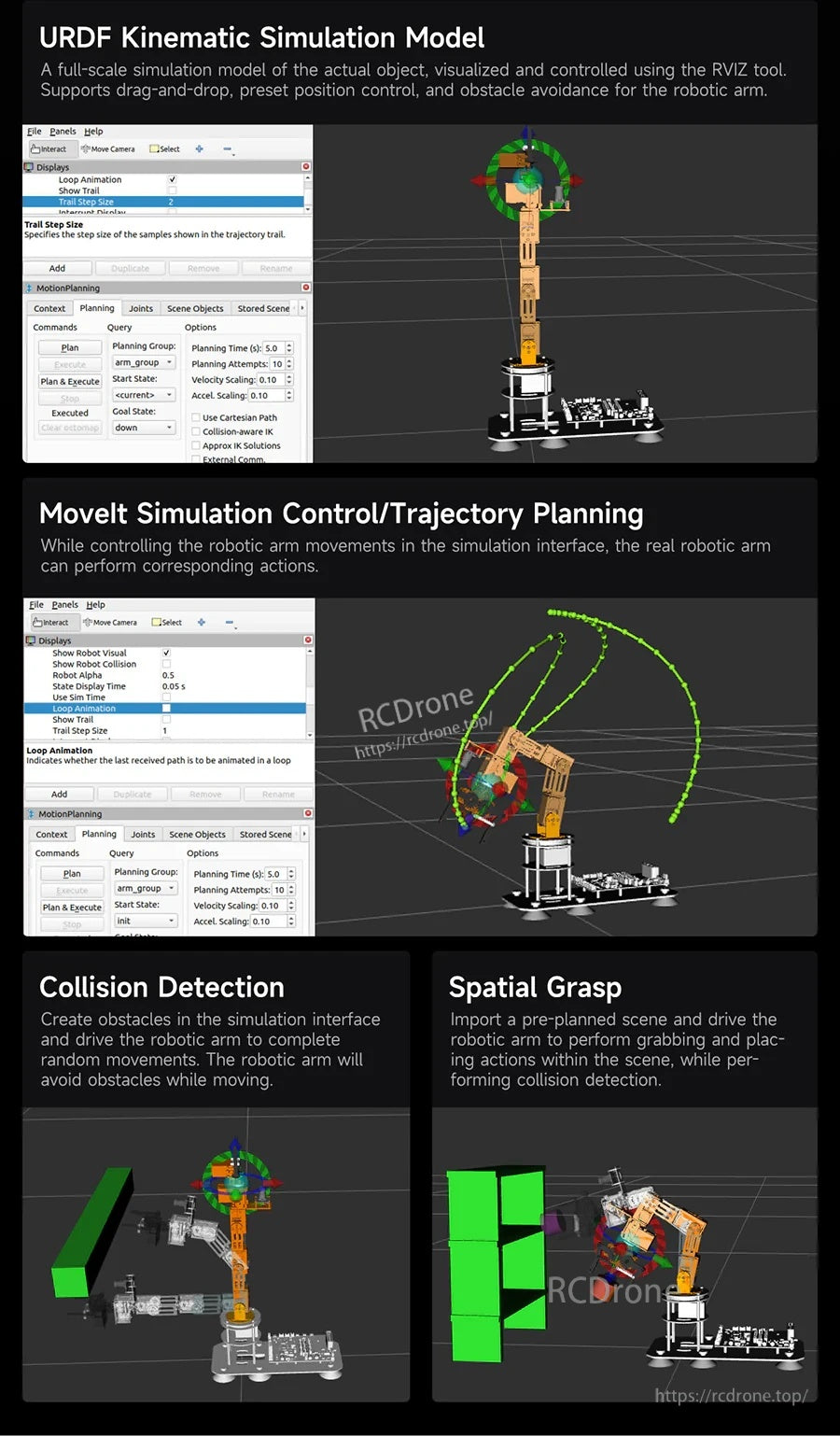
- MoveIt + RViz: الصور تسرد تخطيط حركة MoveIt ومحاكاة الذراع الروبوتية RViz.
- الاتصال التسلسلي للآلة الافتراضية: الصور تصف إرسال التعليمات من الآلة الافتراضية إلى المعالج المساعد STM32 عبر منفذ تسلسلي لتحريك كل مفصل.
- طرق التحكم عن بعد (نص): تطبيق الهاتف المحمول، مقبض لاسلكي، وبرمجيات الكمبيوتر.
رؤية الذكاء الاصطناعي، الإيماءات، وتدريب النماذج (كما هو موضح)
- التعرف البصري للذكاء الاصطناعي/تتبع الأهداف: التعرف على الألوان & التتبع؛ التقاط الألوان؛ التفاعل مع الألوان؛ فرز النفايات؛ تكديس الكتل الملونة؛ "لعبة الالتقاط".
- التفاعل بالإيماءات (MediaPipe): مجموعة حركات التحكم بالإيماءات للذراع الروبوتية؛ التحكم بالتعرف على الإيماءات للتكديس؛ التحكم في وضعية الذراع الروبوتية؛ التعرف على الذراع الروبوتية وتتبع الكف.
- أطر الخوارزميات (نص الصورة): خوارزمية الحركيات العكسية؛ YOLOv11؛ OpenCV؛ MediaPipe.
- التعلم العميق & تدريب النماذج (نص الصورة) : يدعم التدريب المخصص ونشر تحديد الكمية للنماذج؛ الأمثلة المعروضة تشمل تصنيف النفايات وتدريب النماذج (عرض حالة YOLOv11).
ملاحظات معروضة في الصور: "سلة المهملات غير مشمولة في قائمة الشحن." "يتطلب تدريب النموذج من المستخدمين تدريب أنفسهم.”
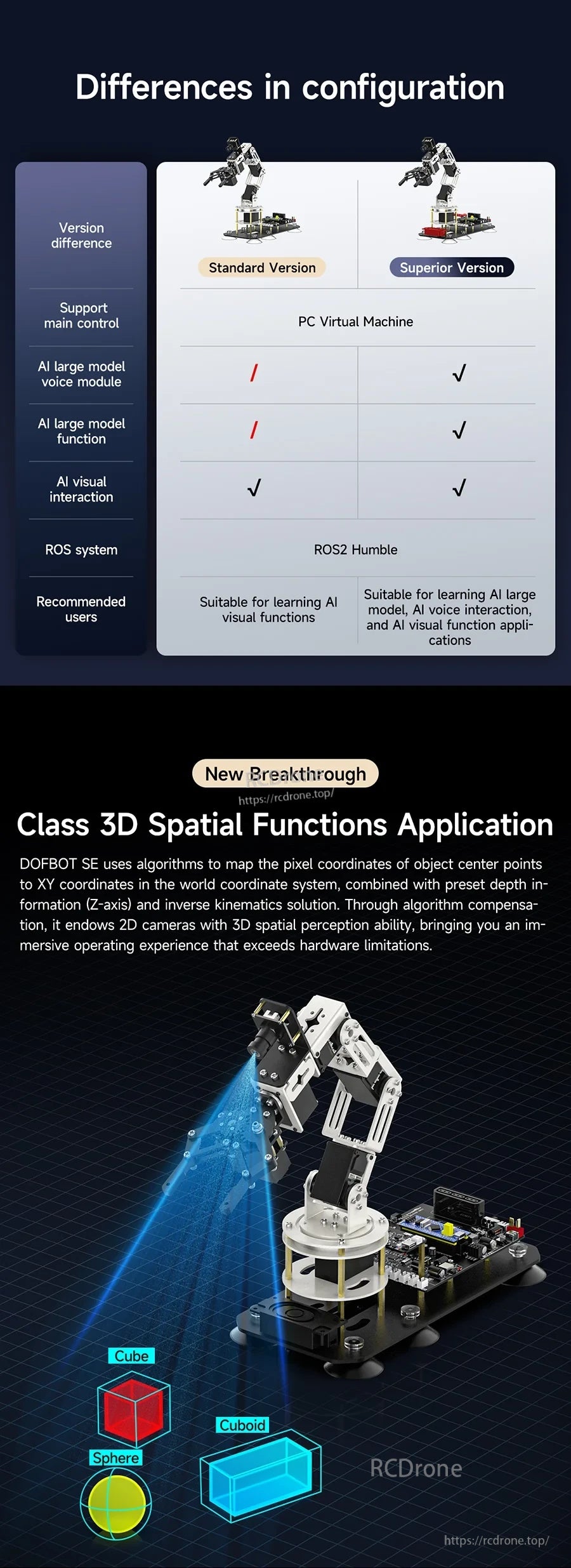
الاختلافات بين الإصدارات (نص الصورة)
| الإصدار القياسي | الإصدار المتفوق | |
| دعم التحكم الرئيسي | الآلة الافتراضية للكمبيوتر الشخصي | |
| وحدة الصوت للنموذج الكبير للذكاء الاصطناعي | لا | نعم |
| وظيفة النموذج الكبير للذكاء الاصطناعي | لا | نعم |
| التفاعل البصري للذكاء الاصطناعي | نعم | نعم |
| نظام ROS | ROS2 Humble | |
| المستخدمون الموصى بهم | مناسب لتعلم وظائف الذكاء الاصطناعي البصرية | مناسب لتعلم تطبيقات النموذج الكبير للذكاء الاصطناعي، التفاعل الصوتي للذكاء الاصطناعي، ووظائف الذكاء الاصطناعي البصرية |
التطبيقات
- تعلم وبحث ROS2: الحركيات، تخطيط الحركة، محاكاة MoveIt، واكتشاف الاصطدام.
- عروض رؤية الذكاء الاصطناعي: تتبع الأجسام، التعرف على الألوان، الإمساك والتنسيب، وسير العمل في الفرز.
- عروض التفاعل متعدد الوسائط (كما هو موضح): تحليل الفيديو، التحكم في الأوامر الطويلة، المعالجة الذكية، وفرز الفضاء ثلاثي الأبعاد.
الدروس التعليمية & مقاطع الفيديو
رابط الدرس: ذراع روبوتية Yahboom DOFBOT SE
التفاصيل
يقترن DOFBOT SE بذراع مكتبي 6-DOF مع التحكم عبر جهاز افتراضي على الكمبيوتر وعمليات ROS2 Humble للتعلم والتطوير.
يقلل التحكم الرئيسي عبر الجهاز الافتراضي من الاعتماد على الأجهزة مع الحفاظ على الوظائف الأساسية مثل تخطيط الحركة، محاكاة RViz، والتفاعل البصري ثنائي الأبعاد.
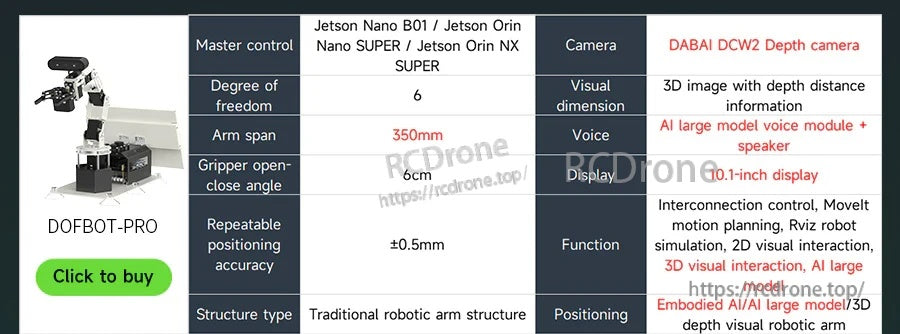
تضيف التكوينات الأعلى تفاعلًا بصريًا ثلاثي الأبعاد يعتمد على العمق لتطبيقات الإدراك المكاني والإمساك.
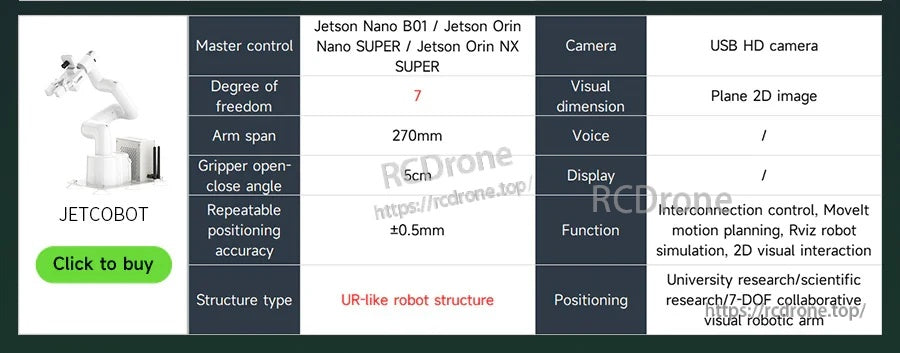
خيارات الأذرع الأخرى في السلسلة تسلط الضوء على اختيارات مختلفة للدرجات والهيكل لتلبية احتياجات البحث والتعليم المحددة.
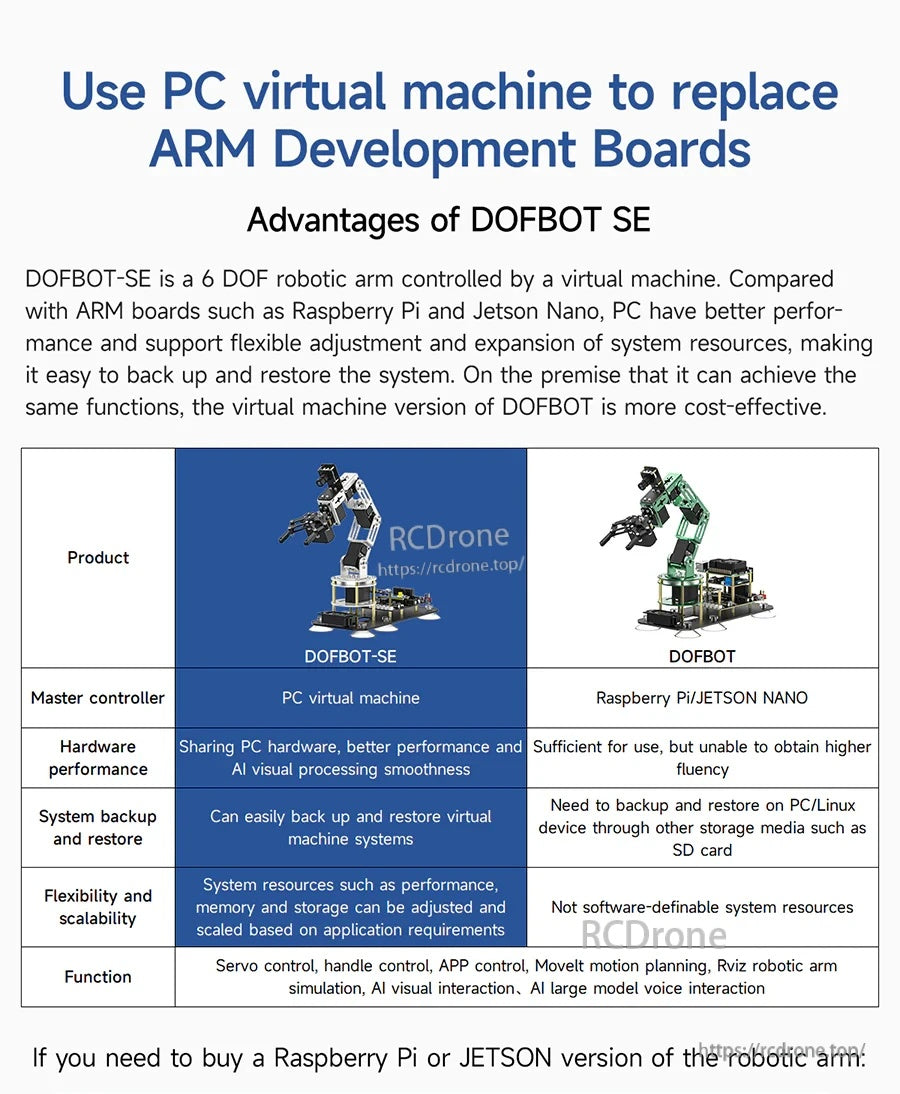
بالمقارنة مع لوحات تطوير ARM، يركز نهج الآلة الافتراضية للكمبيوتر الشخصي على التوسع الأسهل، النسخ الاحتياطي/الاستعادة، والتطوير الاقتصادي.

مصمم لتطوير ROS2، يدعم DOFBOT SE التفاعل مع الرؤية الذكية والتحكم في المحركات المتعددة في شكل مكتبي مضغوط.

التفاعل متعدد الوسائط، التطبيقات البصرية، والدروس التعليمية خطوة بخطوة تساعد في الانتقال من الحركة الأولى إلى مهام الرؤية الذكية العملية.
اختر التكوين الذي يناسب احتياجاتك، من أساسيات ROS2 Humble إلى قدرات النماذج الكبيرة للذكاء الاصطناعي الموسعة.
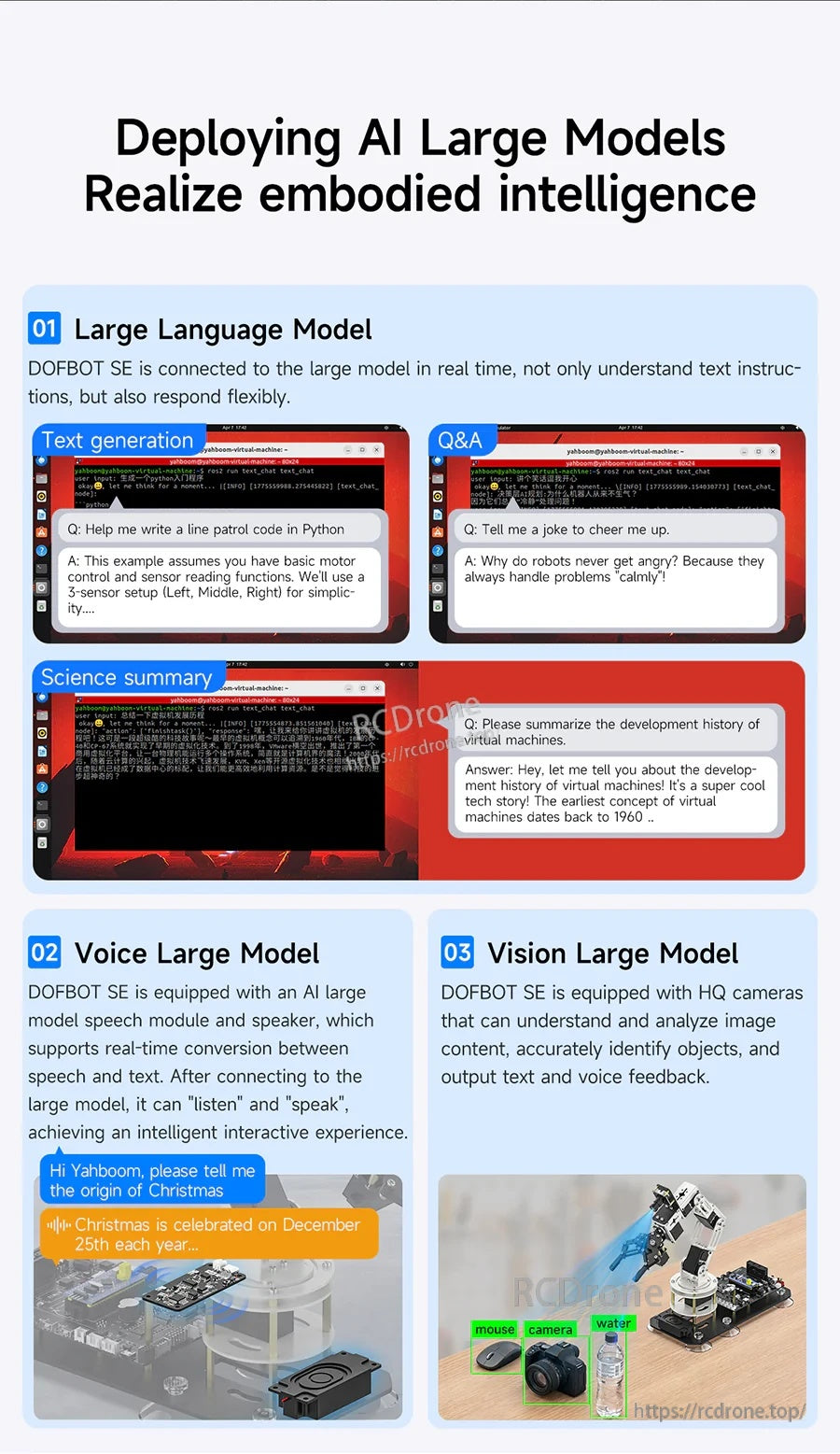
تمكن النماذج الكبيرة للغة والصوت والرؤية من أوامر وردود فعل أكثر طبيعية أثناء تشغيل الذراع الروبوتية.

تُركز عروض التطبيقات التوضيحية على تحويل الأوامر الطبيعية إلى إجراءات قابلة للتكرار مثل التعامل مع تسلسل وترتيبها.
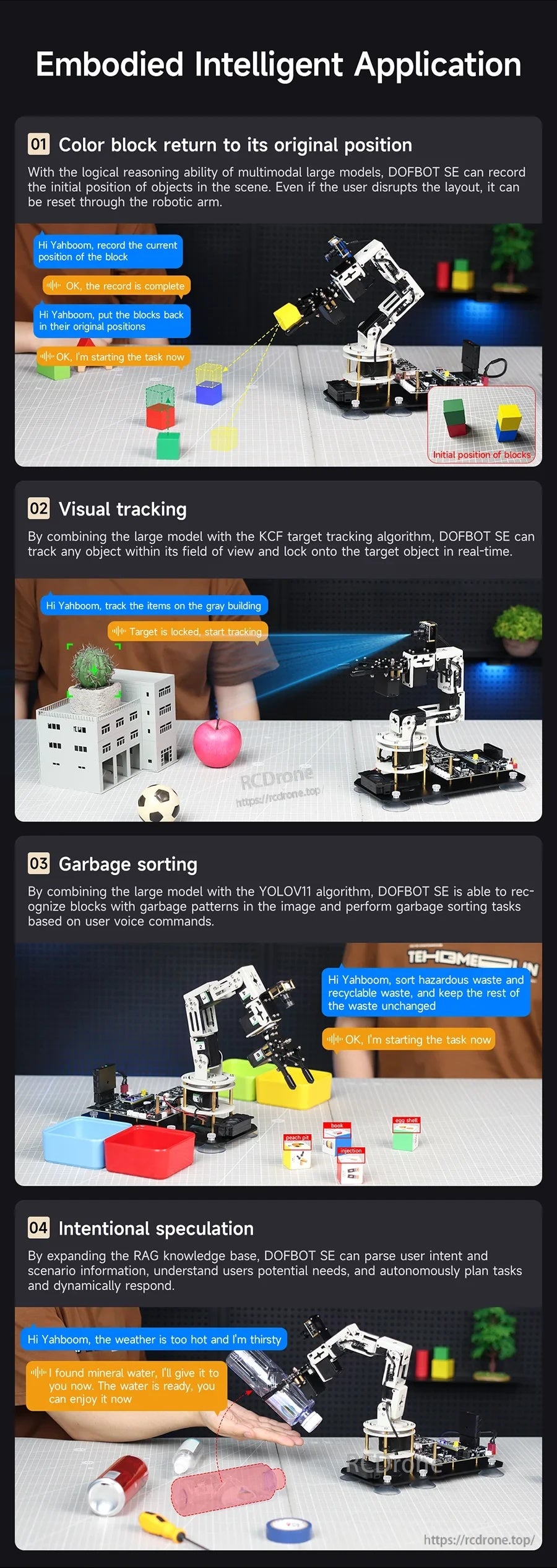
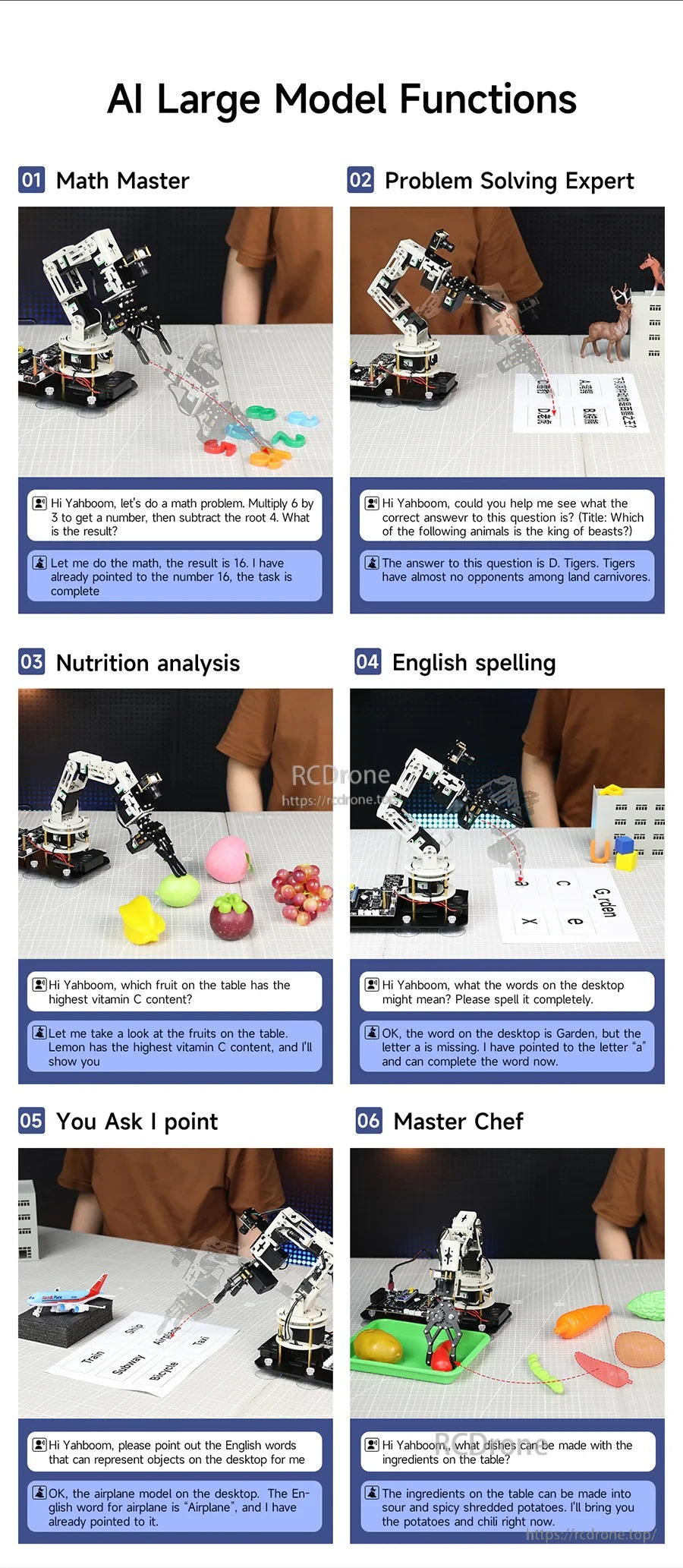
يدعم الفهم متعدد الوسائط سيناريوهات متنوعة بأسلوب الفصول الدراسية مثل الأسئلة والأجوبة، والتحليل، وتنفيذ المهام الموجهة.
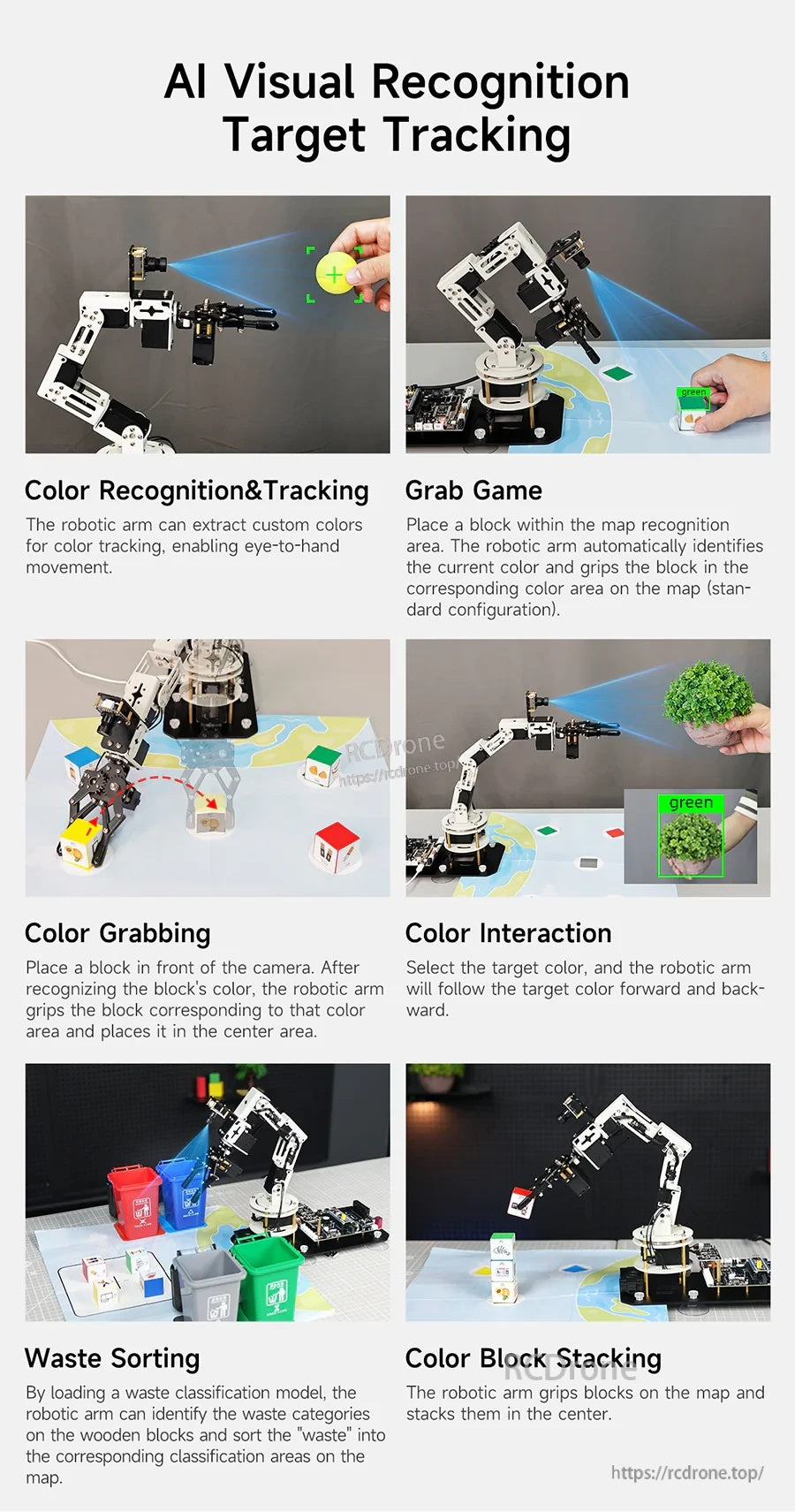
تشمل وظائف الرؤية ثنائية الأبعاد التعرف على الألوان، وتتبع الأهداف، والإمساك الموجه للمشاريع التفاعلية على الطاولة.
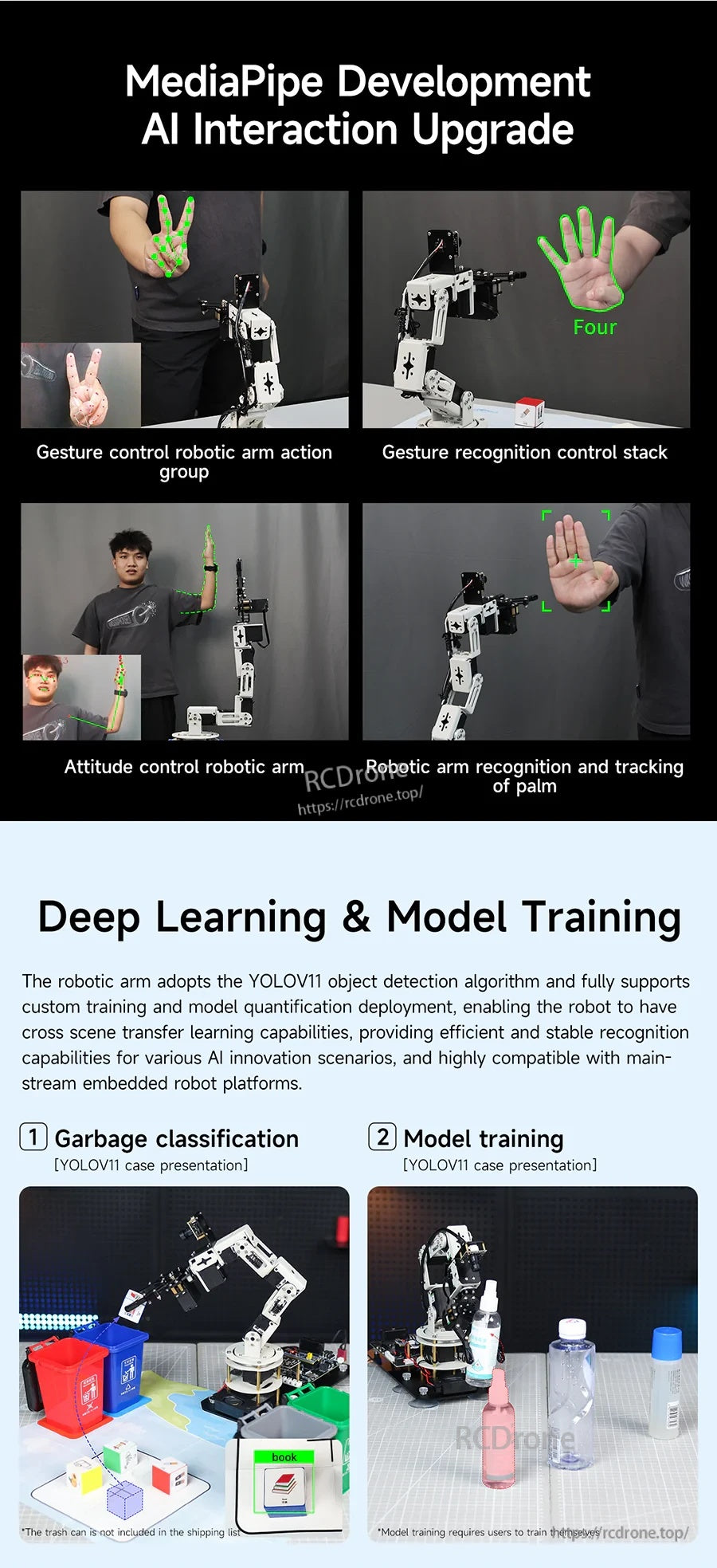
يمتد محتوى التعرف على الإيماءات وتدريب النماذج إلى ما وراء الماسك لتجارب تحكم بالذكاء الاصطناعي أكثر ثراءً.
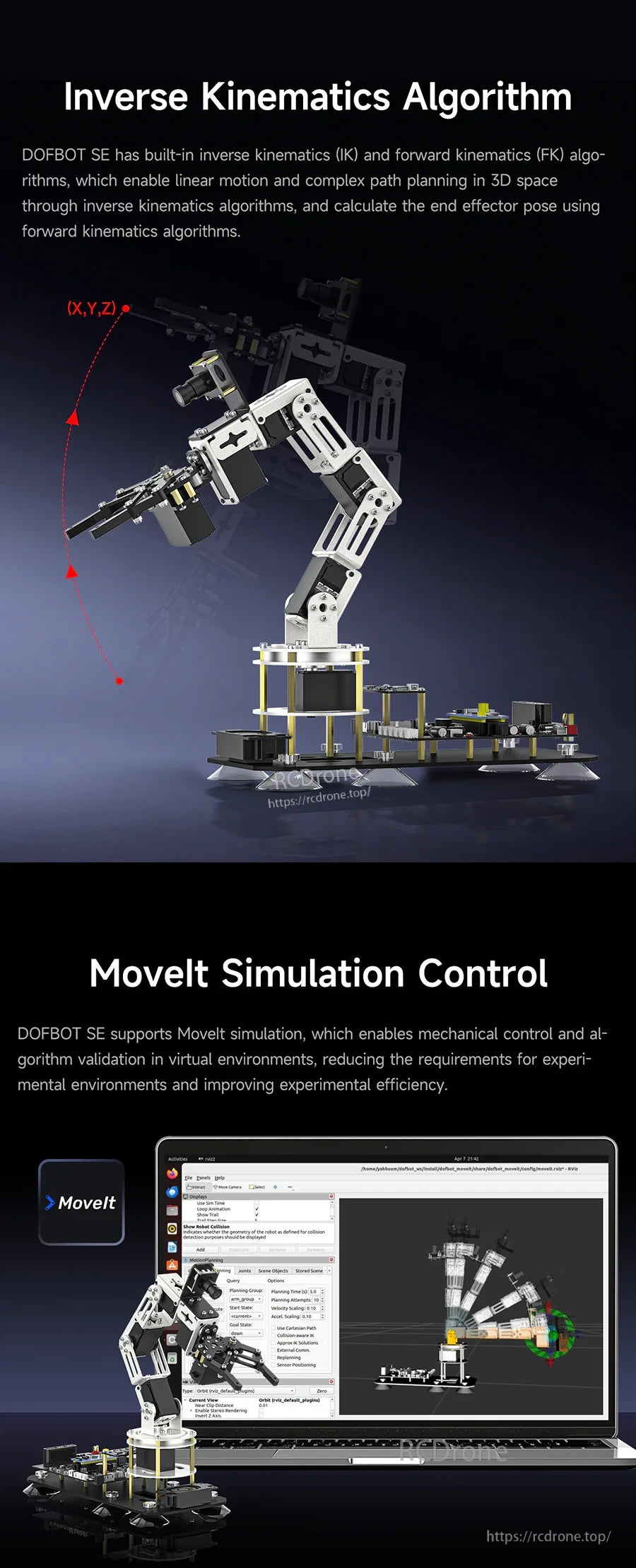
يساعد محاكاة ROS2 الحركية بالإضافة إلى محاكاة MoveIt في التحقق من صحة المسارات قبل تشغيل الحركات على الذراع الحقيقي.
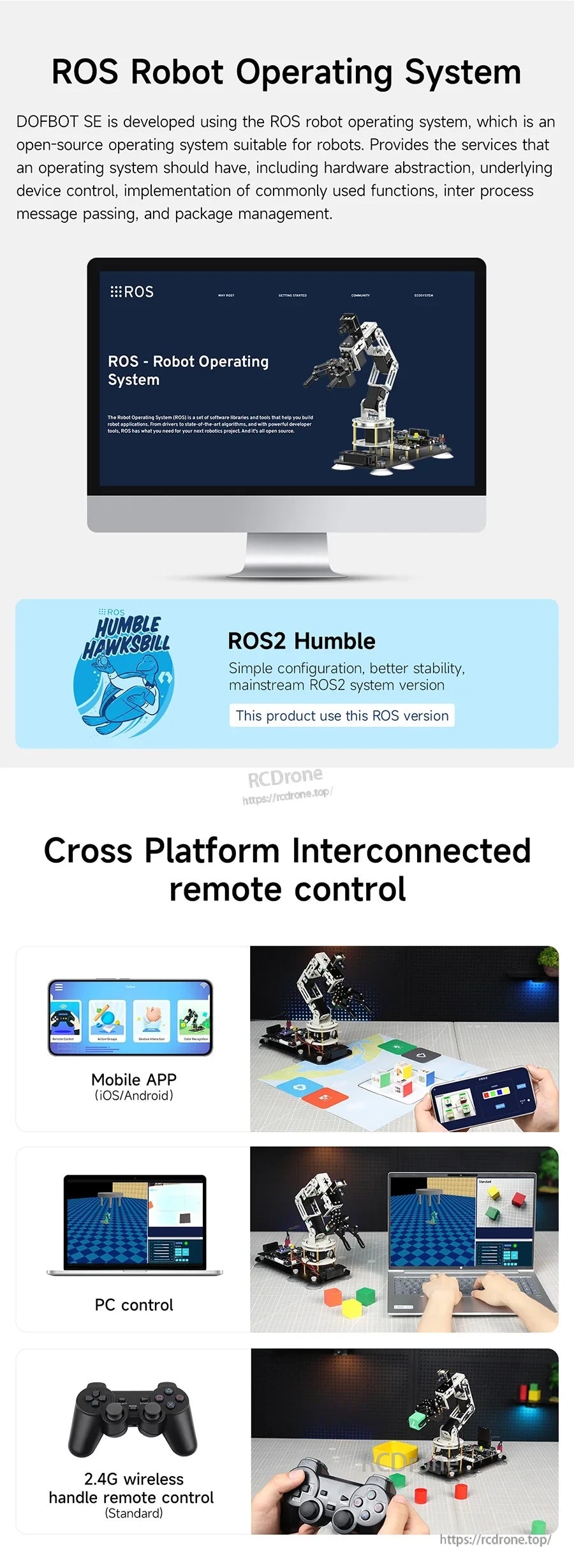
دعم ROS2 Humble وطرق التحكم المتعددة—تطبيق الهاتف المحمول، التحكم عبر الكمبيوتر، والمقبض اللاسلكي—تناسب إعدادات التعلم المختلفة.
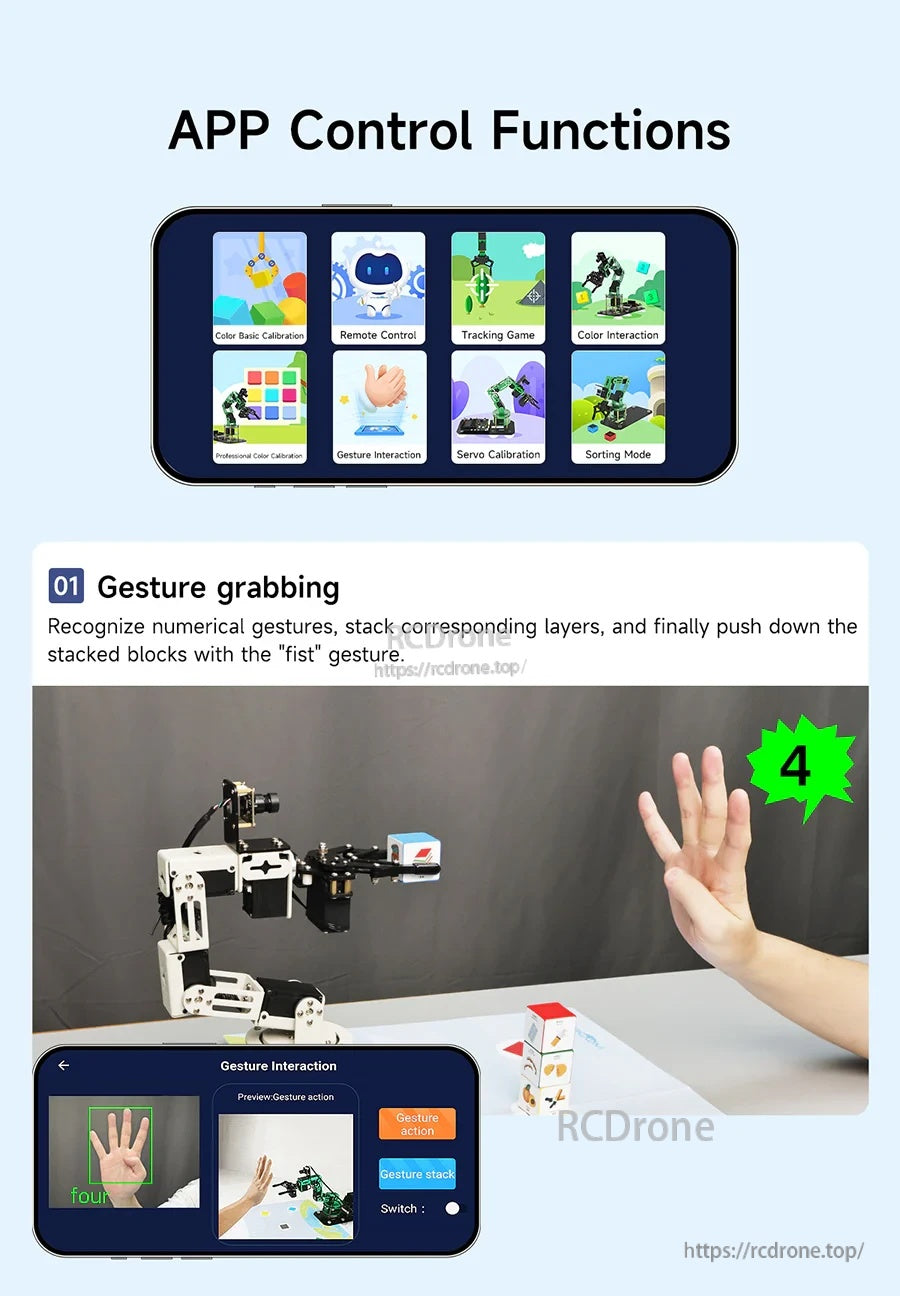
يتضمن تطبيق DOFBOT SE إمساك الإيماءات إلى جانب التحكم عن بعد، والتتبع، ومعايرة السيرفو، وأوضاع الفرز لعملية تشغيل مرنة.
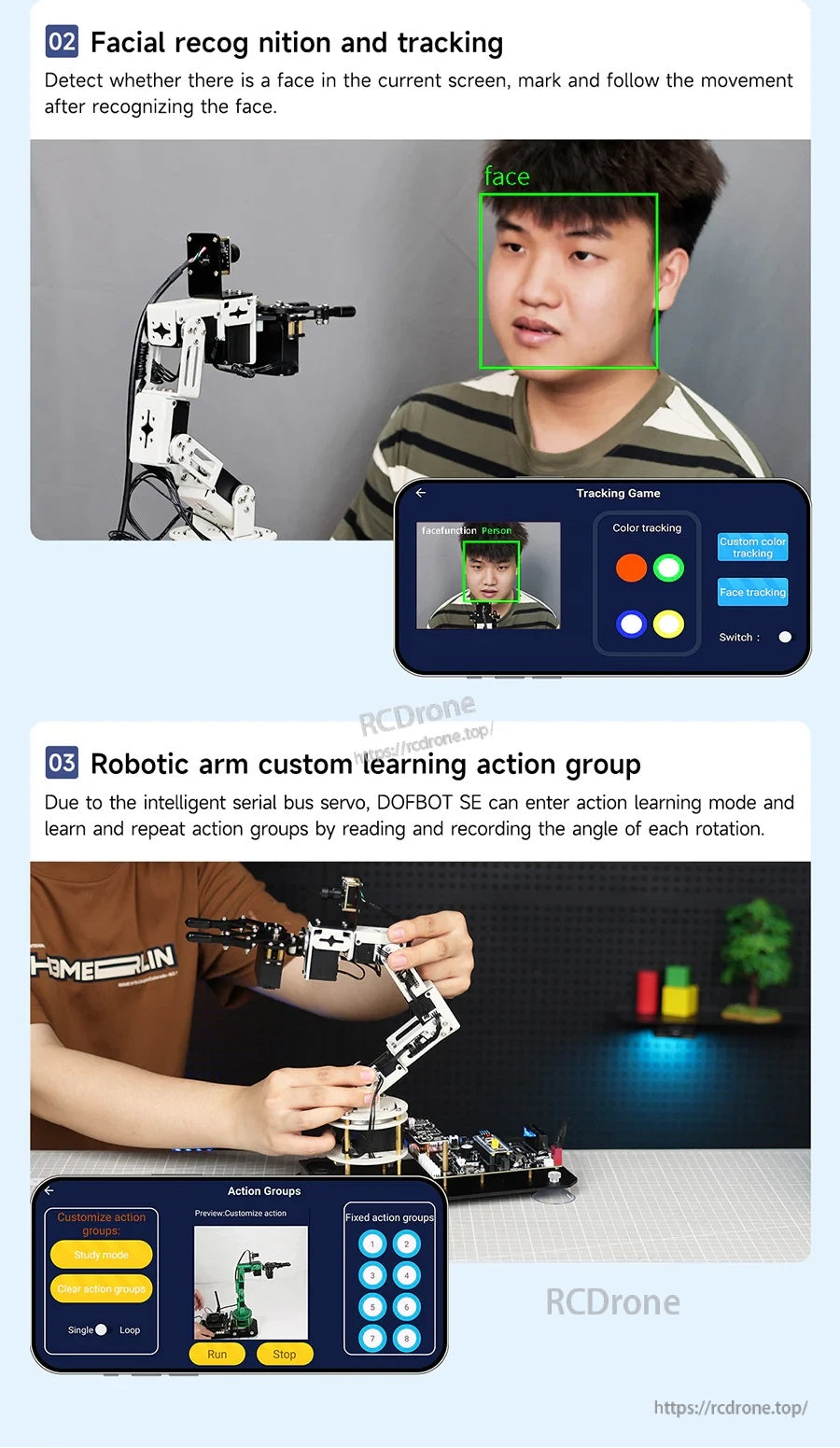
يدعم ذراع الروبوت DOFBOT SE تتبع التعرف على الوجه وتعلم مجموعة الحركات المخصصة لتسلسلات الحركة القابلة للتكرار.
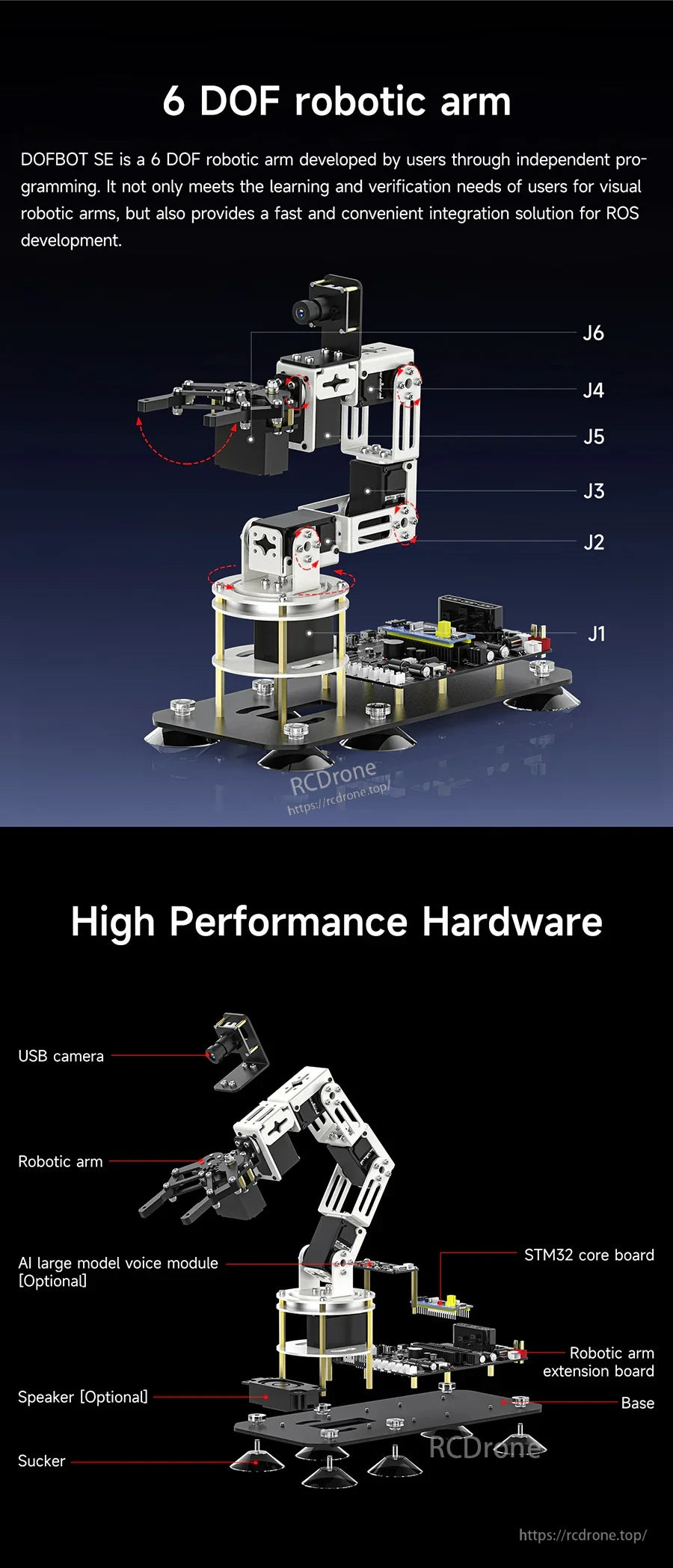
يتميز طقم ذراع الروبوت DOFBOT SE 6-DOF بكاميرا USB، ولوحة أساسية STM32، ومفاصل J1–J6 موضحة بوضوح، مع دعم اختياري لمكبر الصوت ووحدة الصوت الذكية AI.
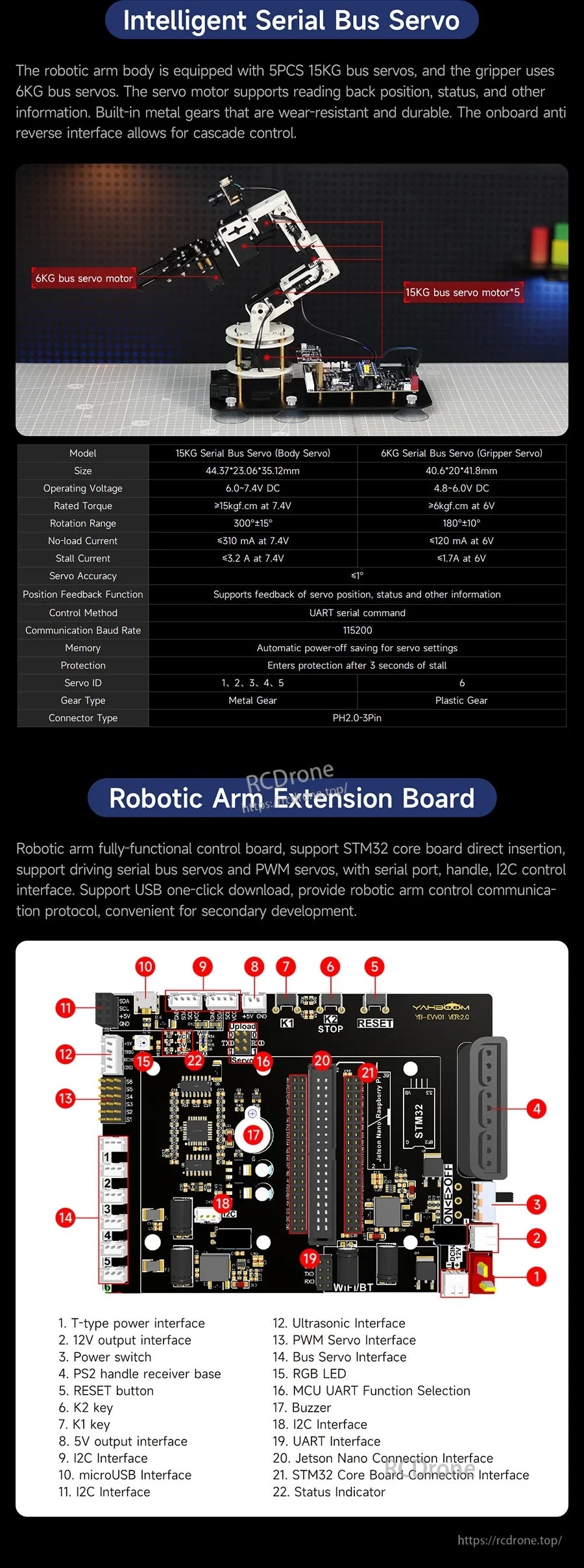
يجمع طقم DOFBOT SE بين ذراع مدفوع بالسيرفو 6DOF ولوحة توسعة توفر منافذ ورؤوس موضحة بوضوح لتوصيل الأجهزة الطرفية والطاقة.

يتضمن طقم DOFBOT SE وحدة كاميرا USB، ومقبض لاسلكي 2.4G مع لوحة استقبال، ووحدة صوت AI مع مكبر صوت وأسلاك لدمج سهل.
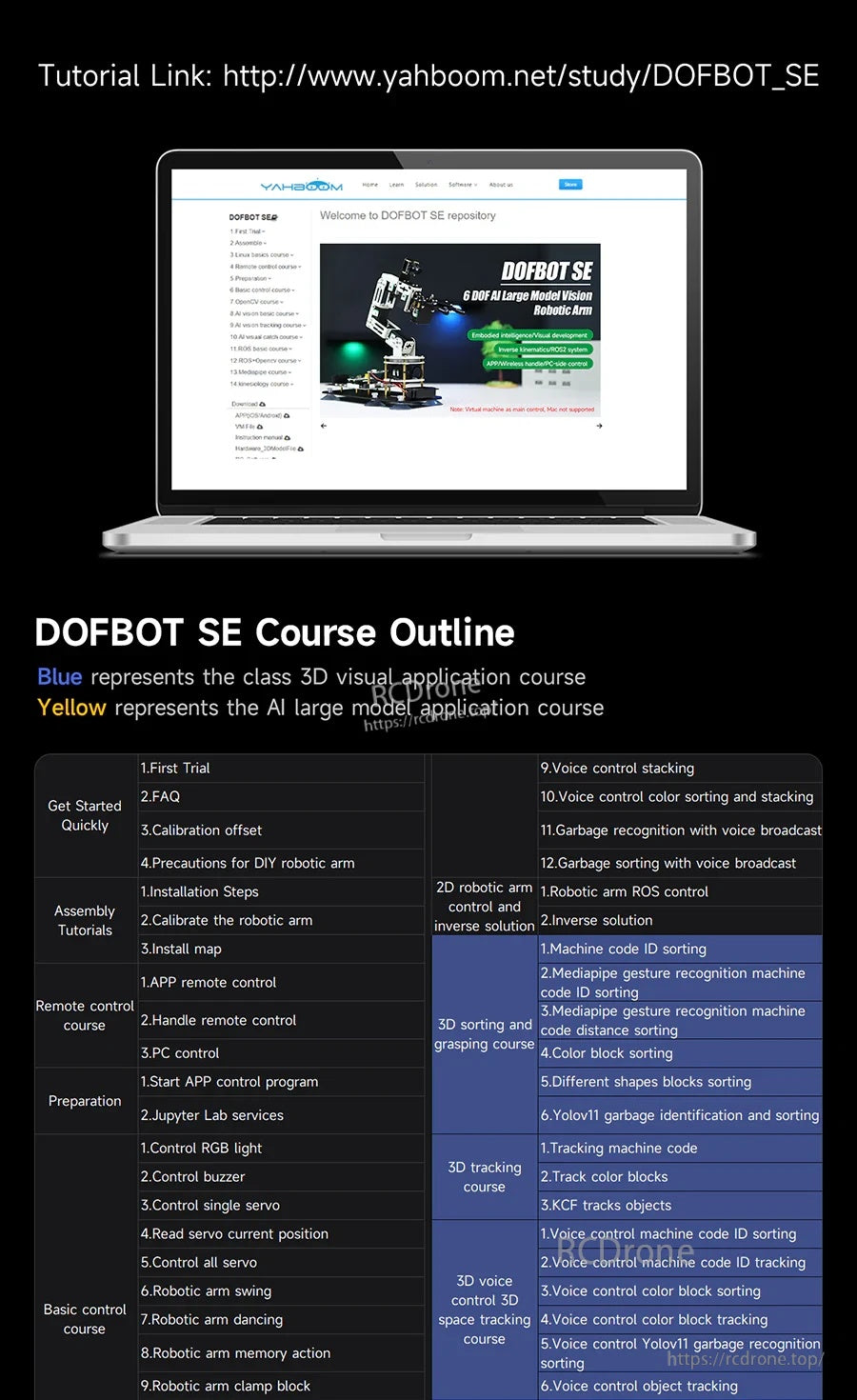
يتضمن مخطط دورة DOFBOT SE إعداد، معايرة، التحكم عن بعد، ودروس البرمجة، بما في ذلك وحدات الرؤية بالذكاء الاصطناعي.
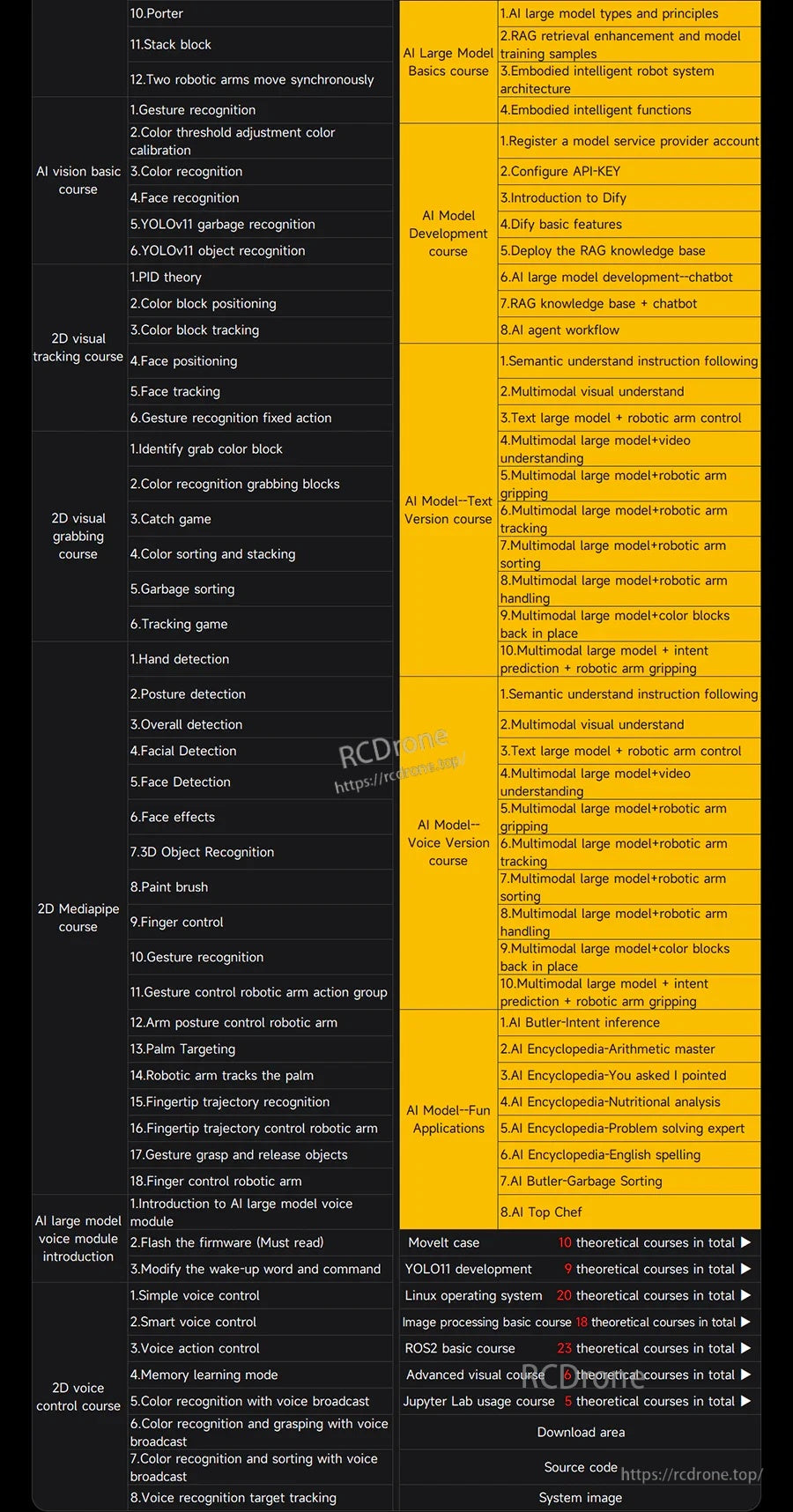
يغطي مخطط التعلم الخاص بالمجموعة أساسيات النماذج الكبيرة، إعداد البيئة، والمشاريع العملية مثل تكوين مفتاح API ودمج ميزات الذكاء الاصطناعي.
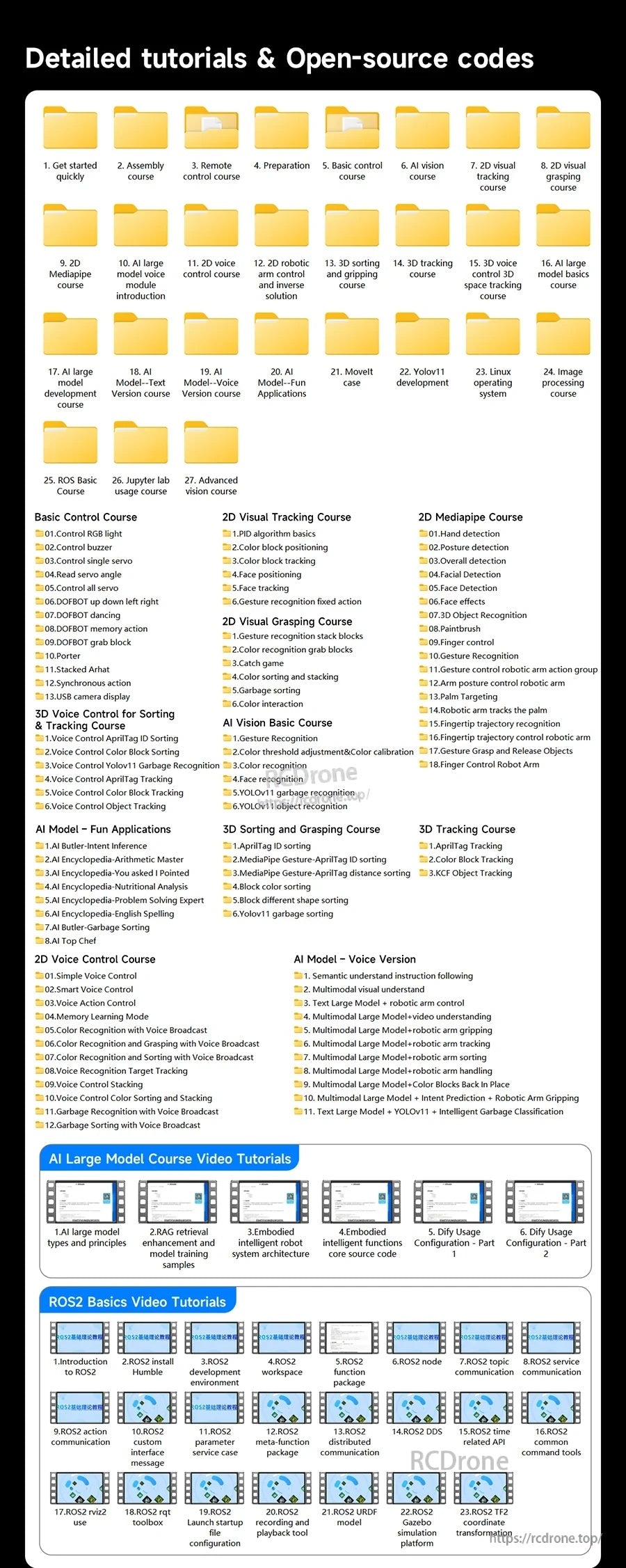
تتضمن المجموعة موارد كود مفتوح المصدر منظمة ودروس فيديو خطوة بخطوة تغطي ميزات النماذج الكبيرة للذكاء الاصطناعي وأساسيات ROS2.
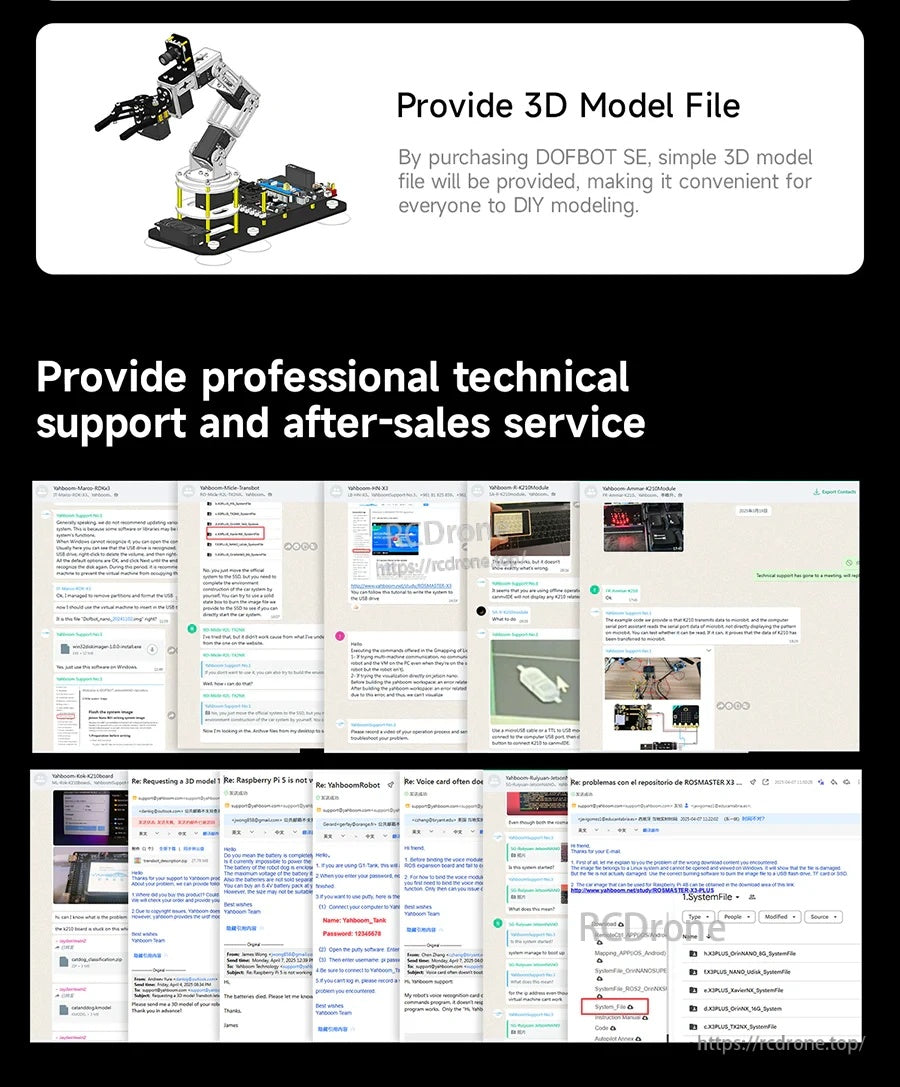
تتضمن مجموعة DOFBOT SE الوصول إلى ملف نموذج ثلاثي الأبعاد بسيط وتوفر دعمًا تقنيًا مع خدمة ما بعد البيع.
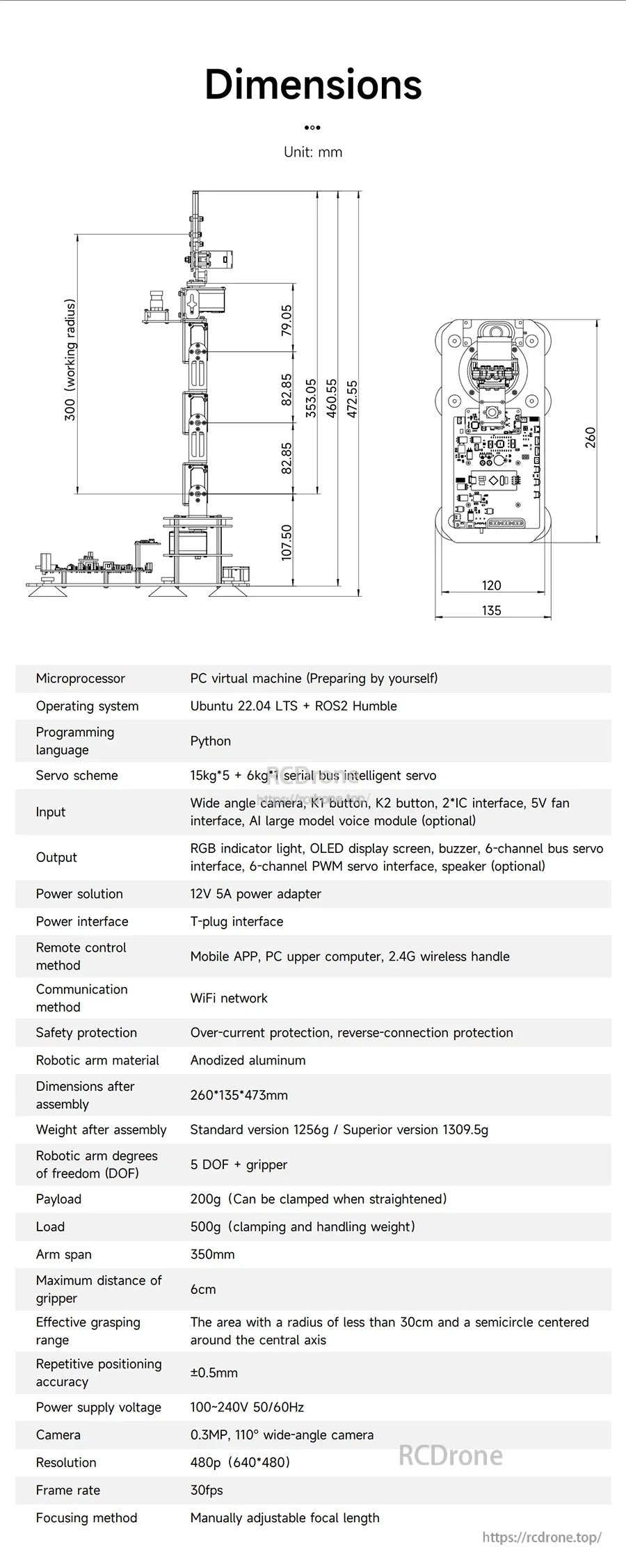
تشمل DOFBOT SE مخطط أبعاد بالميليمتر وقائمة مواصفات سريعة تغطي المنصة المدمجة وبيئة البرمجيات مثل Ubuntu 22.04 مع ROS2 Humble وPython.
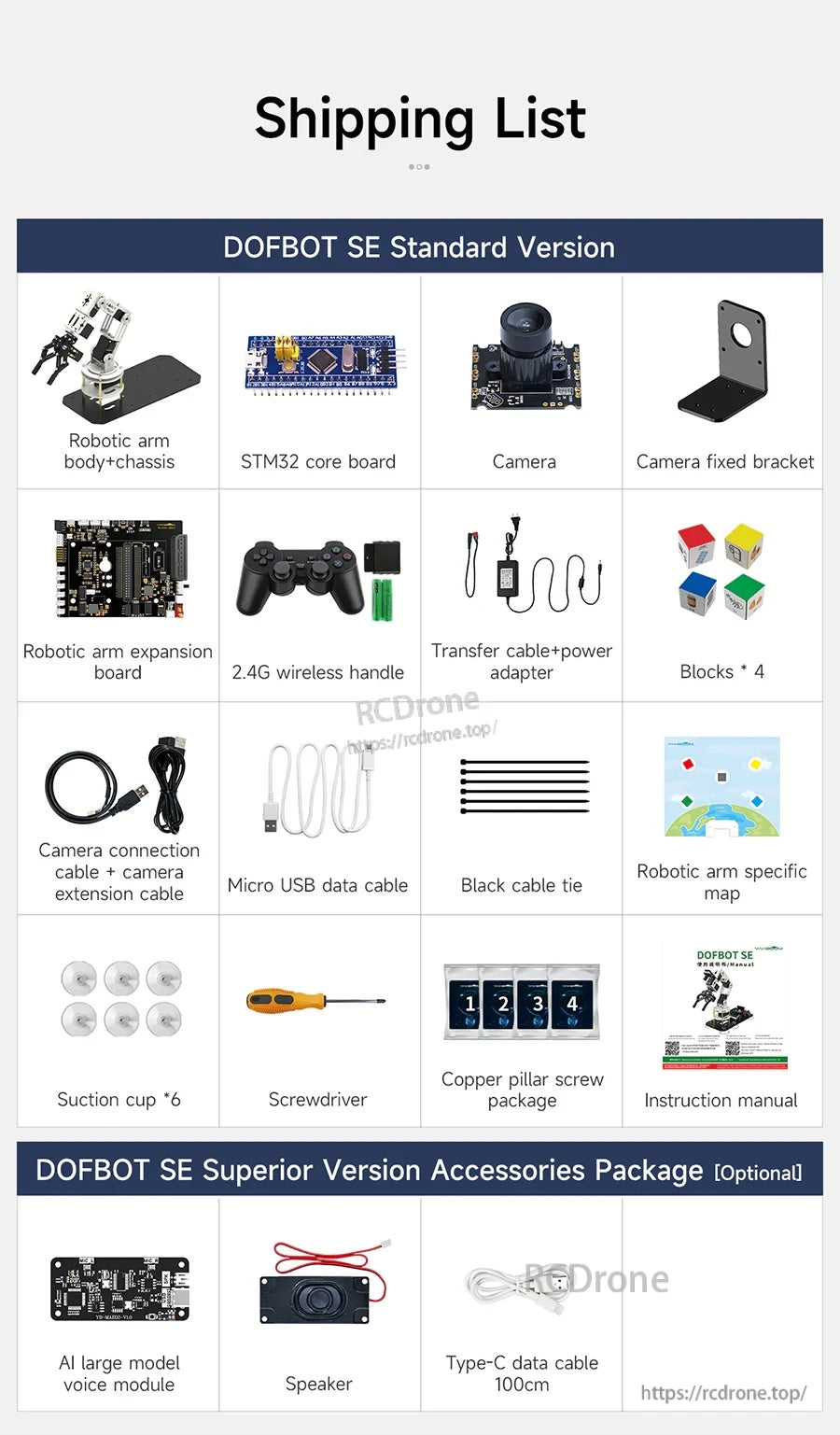
تتضمن مجموعة DOFBOT SE جسم الذراع الروبوتية والهيكل، لوحة STM32 الأساسية، كاميرا مع حامل، 2.
مقبض لاسلكي 4G، كابلات، أدوات، ودليل تعليمات.
Related Collections

















