مجموعة هيكل سيارة روبوت Yahboom Mini بعجلات 4WD من سبائك الألمنيوم 19.5 × 14.2 × 4.5 سم، محركات مشفرة 310
مجموعة هيكل سيارة روبوت Yahboom Mini بعجلات 4WD من سبائك الألمنيوم 19.5 × 14.2 × 4.5 سم، محركات مشفرة 310
Yahboom
تعذر تحميل توفر الالتقاط
نظرة عامة
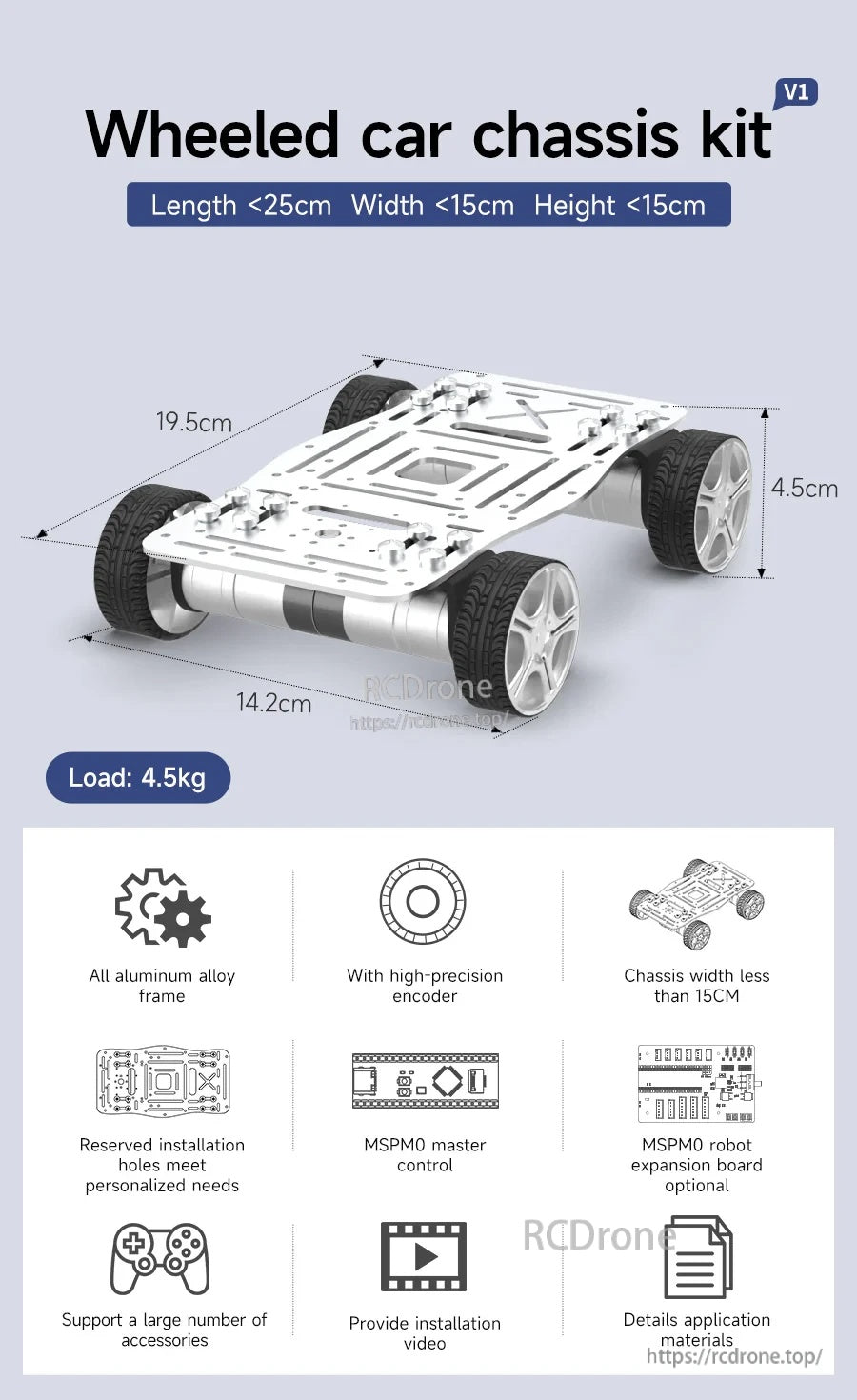
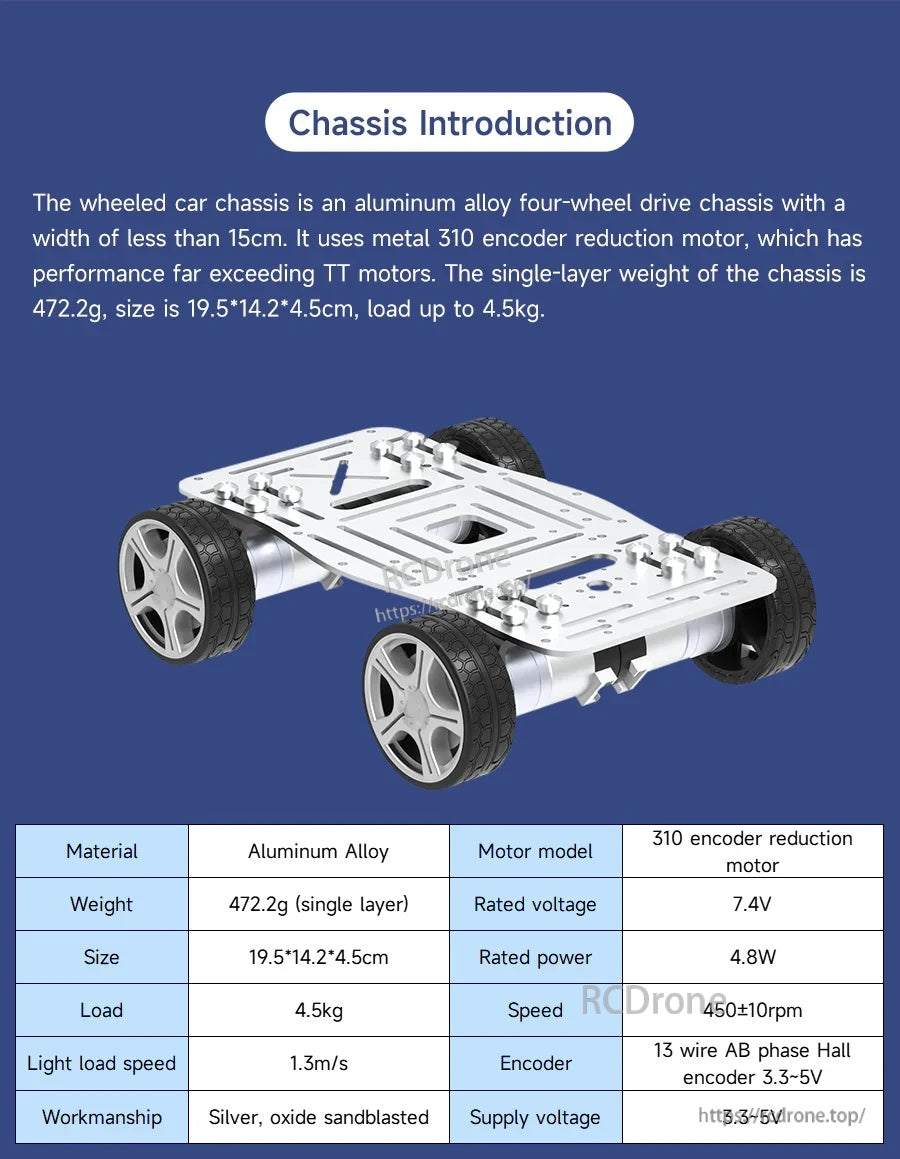
يستخدم مجموعة هيكل سيارة الروبوت Yahboom Mini Wheeled Robot Car هيكلًا مدمجًا من الألومنيوم بطبقة واحدة مصممًا لسباقات سيارات الروبوت ذات حدود حجم المجال. مع عرض هيكل يبلغ 14.2 سم (أقل من 15 سم) وحجم إجمالي أقل من 25 سم في الطول، فهو مناسب لمنصات الروبوت المتنقلة الصغيرة. تم حجز فتحات تركيب متعددة لدعم لوحات التوسعة، وأجهزة الاستشعار، وتجميعات كاميرا PTZ، وأجهزة الاتصال.
الميزات الرئيسية
- إطار من الألومنيوم بالكامل؛ الصنعة: فضي، مؤكسد بالرمل
- فتحات تركيب محجوزة لتلبية احتياجات التوسع الشخصية
- هيكل دفع رباعي؛ ملاحظات المنصة: خيار الدفع الثنائي/الدفع الرباعي
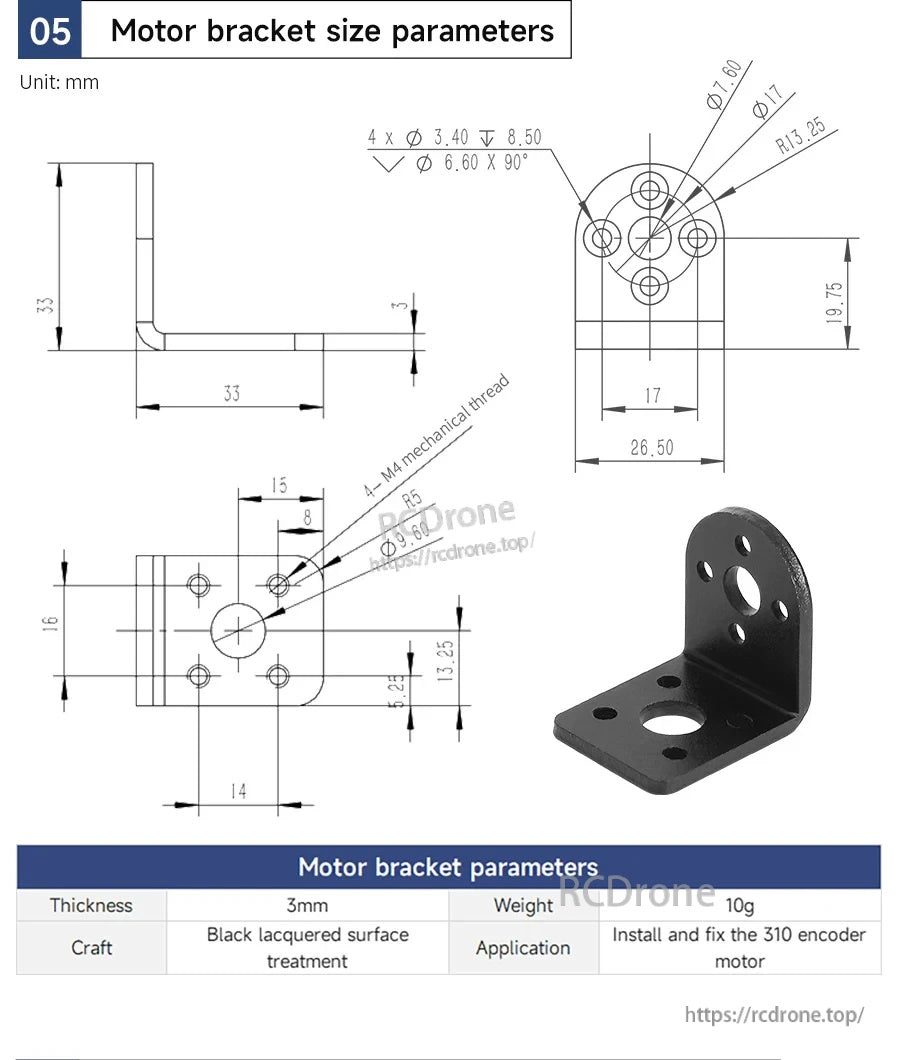
- يستخدم محركات تخفيض مع ترميز 310؛ نوع الترميز: مشفر هول ذو 13 سلكًا بمرحلة AB (3.3–5V)
- إطارات مطاطية 48 مم؛ يستخدم عمود المحرك 310 تصميم "عمود الزهرة" لزيادة الاحتكاك وتقليل خطر انفصال الإطارات
- يتم توفير ملفات النموذج ثلاثي الأبعاد للهيكل (كما ذكر المورد)
المواصفات
| المادة | سبائك الألومنيوم |
| حجم الهيكل | 19.5 x 14.2 x 4.5 سم |
| الحد الأقصى للحجم الكلي (ملاحظة المنصة) | الطول < 25 سم؛ العرض < 15 سم؛ الارتفاع < 15 سم |
| عرض الهيكل | <14.2 سم (العرض أقل من 15 سم)|
| الوزن | 472.2 جم (طبقة واحدة) |
| الحمولة | 4.5 كجم |
| سرعة الحمولة الخفيفة | 1.3 م/ث |
| نموذج المحرك | محرك تخفيض مع ترميز 310 |
| الجهد المقنن للمحرك | 7.4 V |
| القدرة المقدرة للمحرك | 4.8 واط |
| سرعة المحرك | 450 ± 10 دورة في الدقيقة |
| المشفر | مشفر هول ذو 13 سلكًا بمرحلة AB، 3.3–5 فولت |
| جهد الإمداد (المشفر) | 3.3–5V |
| حجم الإطار | إطارات مطاطية 48 مم |
ما هو متضمن
- هيكل من سبيكة الألومنيوم (طبقة واحدة)
- محركات 310 × 4
- إطارات مطاطية × 4
التطبيقات
- سباقات السيارات الروبوتية المدمجة ومشاريع التدريب مع حدود عرض الهيكل
- منصة روبوت متنقلة DIY لإضافة أجهزة استشعار، وكاميرا PTZ، وأجهزة اتصال باستخدام فتحات التركيب المحجوزة
التحكم الاختياري & التوسع (غير متضمن)
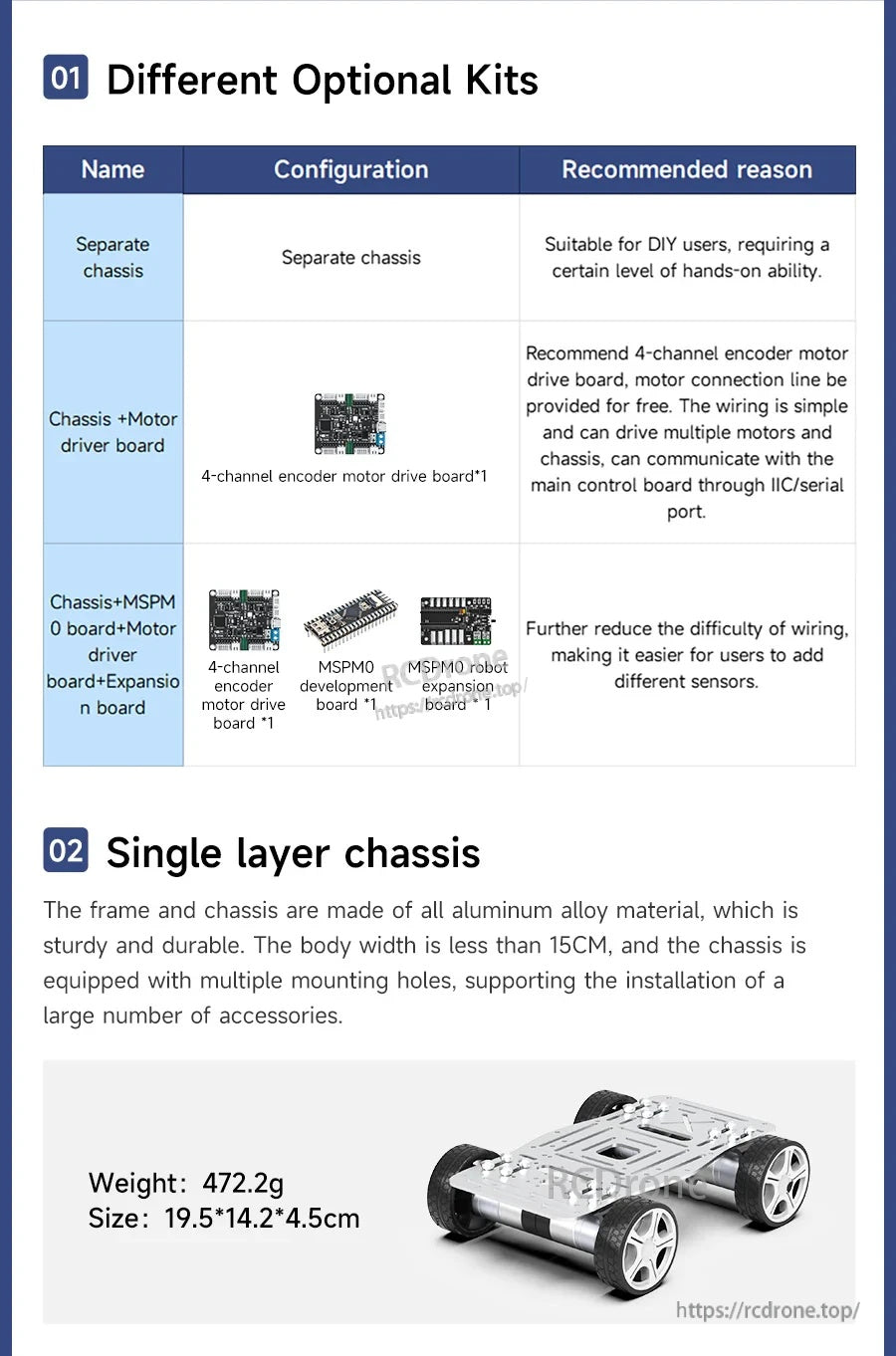
يتم الإشارة إلى تكوينات مجموعة اختيارية مختلفة لهذه المنصة الهيكلية: هيكل منفصل؛ هيكل + لوحة محرك المحرك (لوحة محرك مشفر 4 قنوات × 1)؛ هيكل + لوحة MSPM0 + لوحة محرك المحرك + لوحة التوسع (لوحة محرك مشفر 4 قنوات × 1، لوحة تطوير MSPM0 × 1، لوحة توسع روبوت MSPM0 × 1).للمساعدة في الاختيار، اتصل بـ https://rcdrone.top/ أو أرسل بريدًا إلكترونيًا إلى [email protected].
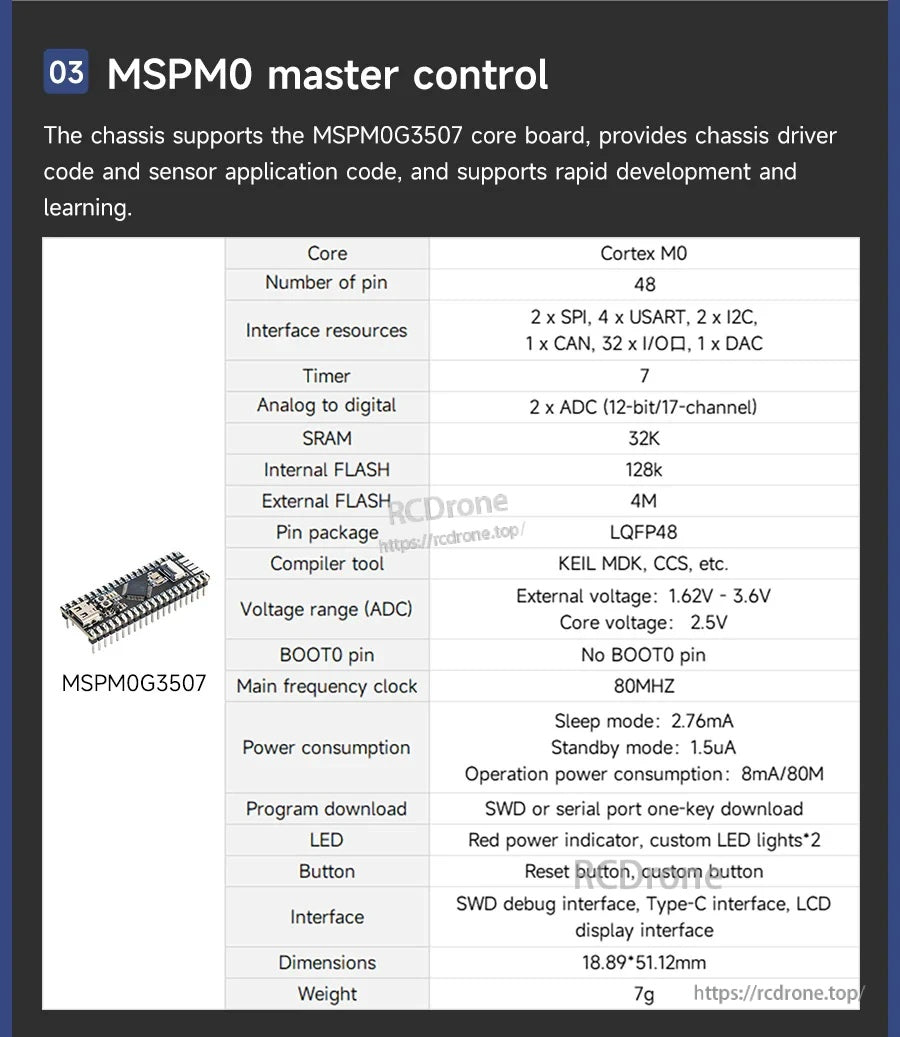
MSPM0 التحكم الرئيسي (MSPM0G3507) – المواصفات المرجعية
| النواة | Cortex M0 |
| عدد الدبابيس | 48 |
| موارد الواجهة | 2 x SPI, 4 x USART, 2 x I2C, 1 x CAN, 32 x I/O, 1 x DAC |
| المؤقت | 7 |
| تحويل من تناظري إلى رقمي | 2 x ADC (12-bit/17-channel) |
| SRAM | 32K |
| الذاكرة الداخلية FLASH | 128k |
| الذاكرة الخارجية FLASH | 4M |
| حزمة الدبابيس | LQFP48 |
| أداة المترجم | KEIL MDK, CCS, إلخ. |
| نطاق الجهد (ADC) | الجهد الخارجي: 1.62V - 3.6V; جهد النواة: 2.5V |
| دبوس BOOT0 | لا يوجد دبوس BOOT0 |
| ساعة التردد الرئيسي | 80MHZ |
| استهلاك الطاقة | وضع السكون: 2.76mA; وضع الاستعداد: 1.5uA; استهلاك الطاقة أثناء التشغيل: 8mA/80M |
| تحميل البرنامج | تحميل مفتاح واحد عبر SWD أو المنفذ التسلسلي |
| LED | مؤشر الطاقة الأحمر، أضواء LED مخصصة x 2 |
| زر | زر إعادة الضبط، زر مخصص |
| واجهة | واجهة تصحيح SWD، واجهة Type-C، واجهة عرض LCD |
| الأبعاد | 18.89 x 51.12 مم |
| الوزن | 7 جم |
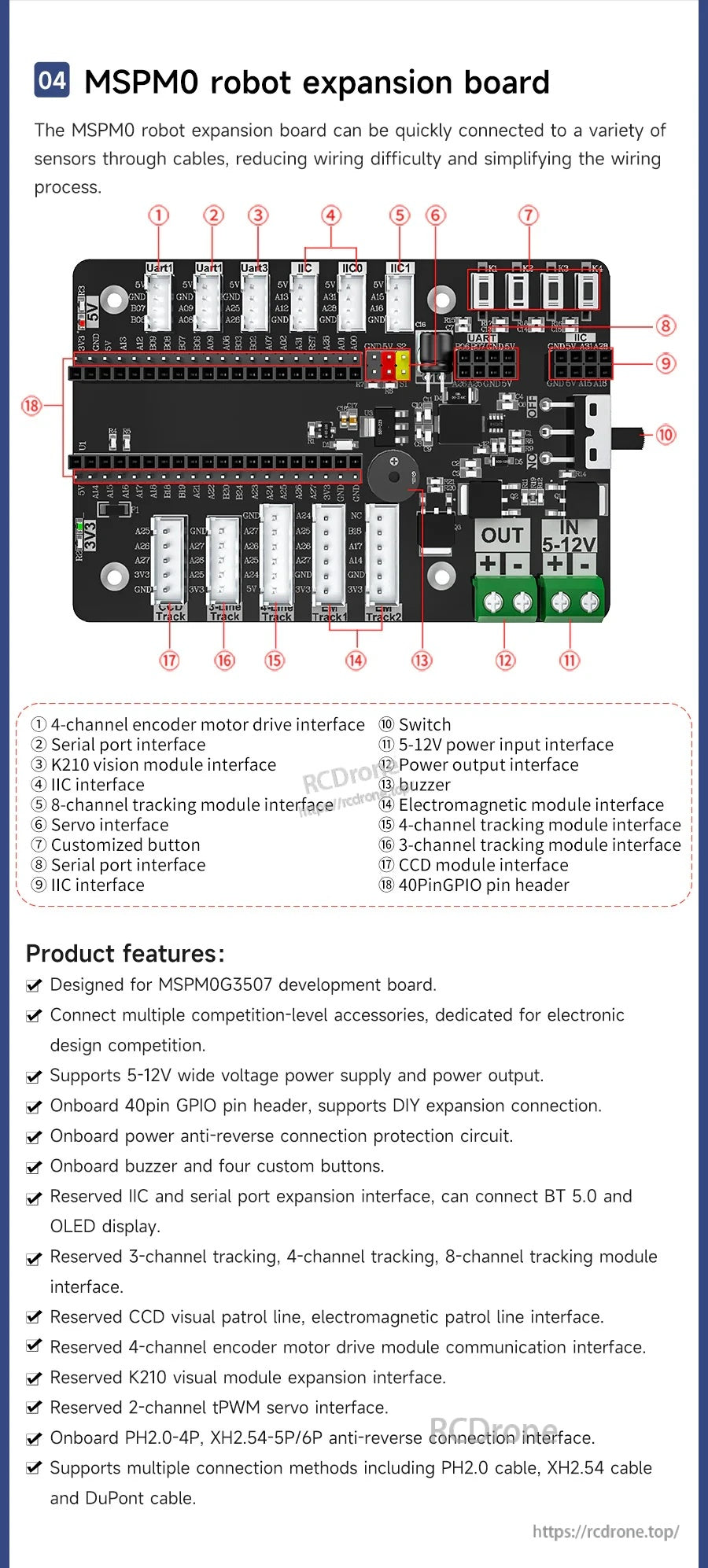
لوحة توسعة الروبوت MSPM0 – الواجهات المرجعية & الميزات
- الواجهات: واجهة محرك مشفر بأربع قنوات؛ واجهة منفذ تسلسلي؛ واجهة وحدة الرؤية K210؛ واجهة IIC؛ واجهة وحدة تتبع بثماني قنوات؛ واجهة سيرفو؛ زر مخصص؛ مفتاح؛ واجهة إدخال طاقة 5–12 فولت؛ واجهة إخراج الطاقة؛ جرس؛ واجهة وحدة كهرومغناطيسية؛ واجهة وحدة تتبع بأربع قنوات؛ واجهة وحدة تتبع بثلاث قنوات؛ واجهة وحدة CCD؛ رأس دبابيس GPIO 40Pin
- الميزات: مصمم للوحة تطوير MSPM0G3507؛ يدعم مصدر طاقة بجهد واسع 5–12 فولت وإخراج الطاقة؛ رأس دبابيس GPIO مدمج بـ 40 دبوس؛ دائرة حماية من عكس الاتصال بالطاقة؛ جرس مدمج وأربعة أزرار مخصصة؛ توسعة IIC ومنفذ تسلسلي محجوزة (يدعم الاتصال بـ BT 5.0 وشاشة OLED)؛ واجهات تتبع محجوزة 3 قنوات/4 قنوات/8 قنوات؛ واجهات خط دورية بصرية CCD وخط دورية كهرومغناطيسية محجوزة؛ واجهة اتصال وحدة محرك مشفر 4 قنوات محجوزة؛ واجهة توسعة وحدة بصرية K210 محجوزة؛ واجهة tPWM سيرفو 2 قنوات محجوزة؛ واجهات اتصال مضادة للانعكاس PH2.0-4P وXH2.54-5P/6P على اللوحة؛ تدعم اتصالات كابلات PH2.0 وXH2.54 وDuPont
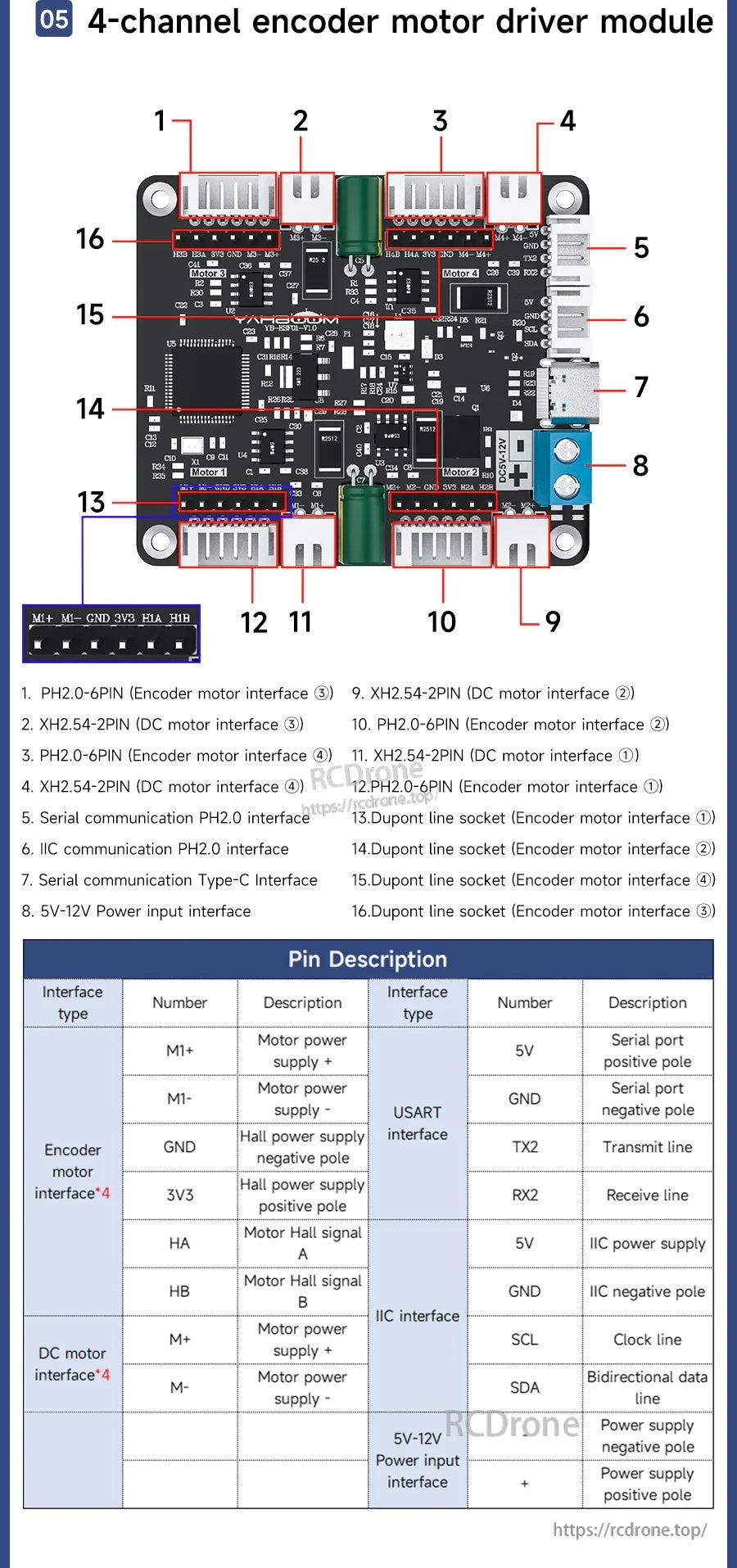
وحدة محرك مشفر 4 قنوات – موصلات مرجعية & وصف الدبوس
- الموصلات: PH2.0-6PIN (واجهات محرك مشفر 1–4)؛ XH2.54-2PIN (واجهات محرك DC 1–4)؛ واجهة اتصال تسلسلي PH2.0؛ اتصال IIC PH2.0 واجهة؛ واجهة الاتصال التسلسلي Type-C؛ واجهة إدخال الطاقة 5V–12V؛ مقابس خط DuPont (واجهات محرك التشفير 1–4)
- دبابيس واجهة محرك التشفير: M1+ (إمداد طاقة المحرك +)، M1- (إمداد طاقة المحرك -)، GND (القطب السالب لإمداد طاقة Hall)، 3V3 (القطب الموجب لإمداد طاقة Hall)، HA (إشارة Hall للمحرك A)، HB (إشارة Hall للمحرك B)
- دبابيس واجهة محرك التيار المستمر: M+ (إمداد طاقة المحرك +)، M- (إمداد طاقة المحرك -)
- دبابيس USART: 5V (القطب الموجب للمنفذ التسلسلي)، GND (القطب السالب للمنفذ التسلسلي)، TX2 (خط الإرسال)، RX2 (خط الاستقبال)
- دبابيس IIC: 5V (إمداد طاقة IIC)، GND (القطب السالب لـ IIC)، SCL (خط الساعة)، SDA (خط البيانات ثنائي الاتجاه)
- إدخال الطاقة 5V–12V: - (القطب السالب لإمداد الطاقة)، + (القطب الموجب لإمداد الطاقة)
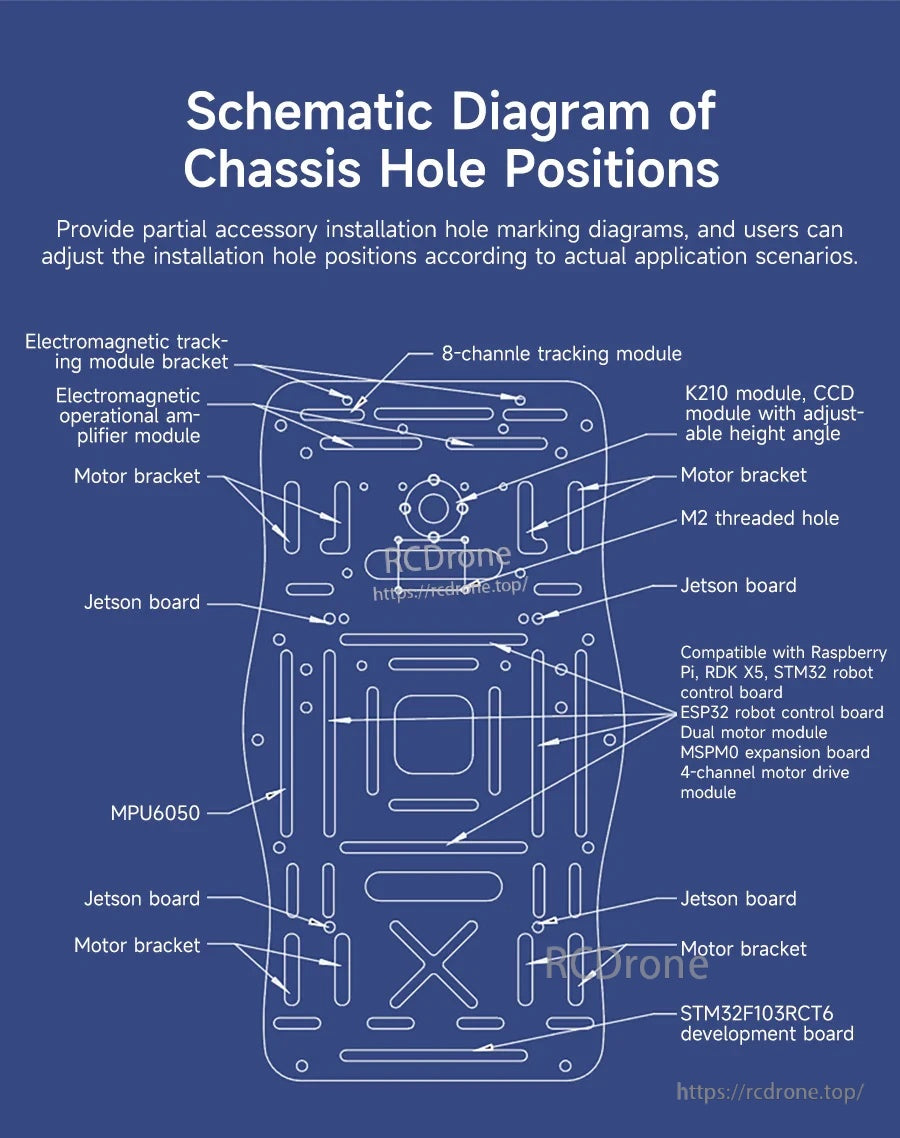
أمثلة تركيب محجوزة (ملاحظات المنصة)
- وحدات تتبع الأشعة تحت الحمراء: دعم وحدة تتبع 4 قنوات و8 قنوات
- MPU6050 وحدة استشعار 6 محاور دعم التركيب
- دعم تركيب PTZ كهربائي 2DOF
- تشمل مراجع وضع اللوحة أمثلة مثل لوحة Jetson؛ ملاحظات التوافق تشير إلى Raspberry Pi، RDK X5، لوحة التحكم في الروبوت STM32، لوحة التحكم في الروبوت ESP32، ولوحة تطوير STM32F103RCT6
- أمثلة على الوحدات البصرية: وحدة التعرف البصري K210 (مع 2.شاشة لمس بحجم 0 بوصة (الخلفية) معروضة) ووحدة التعرف البصري K230 (مع شاشة لمس بحجم 2.4 بوصة (الخلفية) معروضة)
التفاصيل

منصة هيكل 4WD مدمجة بحجم مناسب لسباقات سيارات الروبوت الصغيرة، مع مساحة لتركيب وحدات التحكم، وأجهزة الاستشعار، والإضافات.

يمكن تركيب وحدات الرؤية الاختيارية على حامل قابل للتعديل لمهام التعرف على الذكاء الاصطناعي والمشاريع التفاعلية.

تجعل نقاط التركيب المحجوزة من السهل إضافة أجهزة استشعار التتبع، أو وحدة IMU، أو PTZ 2DOF لتوجيه الكاميرا أو المستشعر.

تتزاوج الإطارات بحجم 48 مم مع تصميم محرك عمود الزهرة للمساعدة في تحسين القبضة وتقليل فرصة انفصال الإطار.
تدعم الفتحات المتعددة والثقوب الملولبة تخطيطات مرنة للوحات التطوير، وحوامل المحركات، وحوامل الوحدات الشائعة.




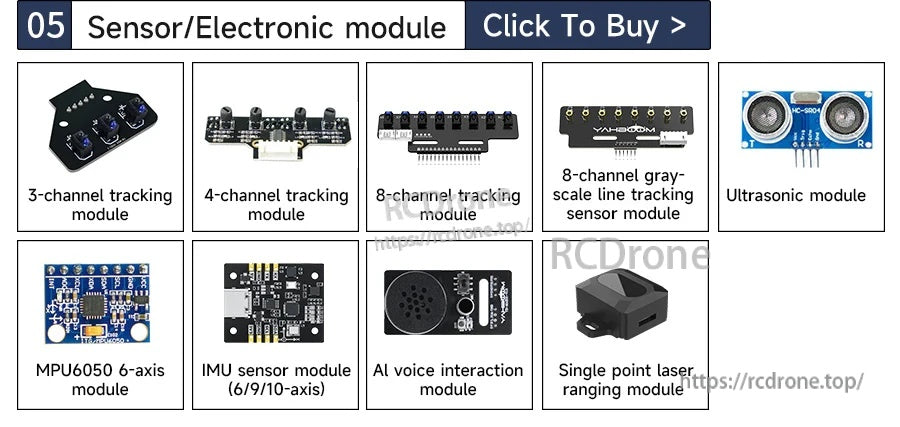
اختر من بين وحدات التتبع، المسافة، IMU، والتفاعل لبناء ميزات سيارة الروبوت التي يحتاجها مشروعك.

تشمل خيارات التحكم جهاز تحكم عن بعد بالأشعة تحت الحمراء أو جهاز تحكم لاسلكي 2.4G للقيادة والاختبار العملي.
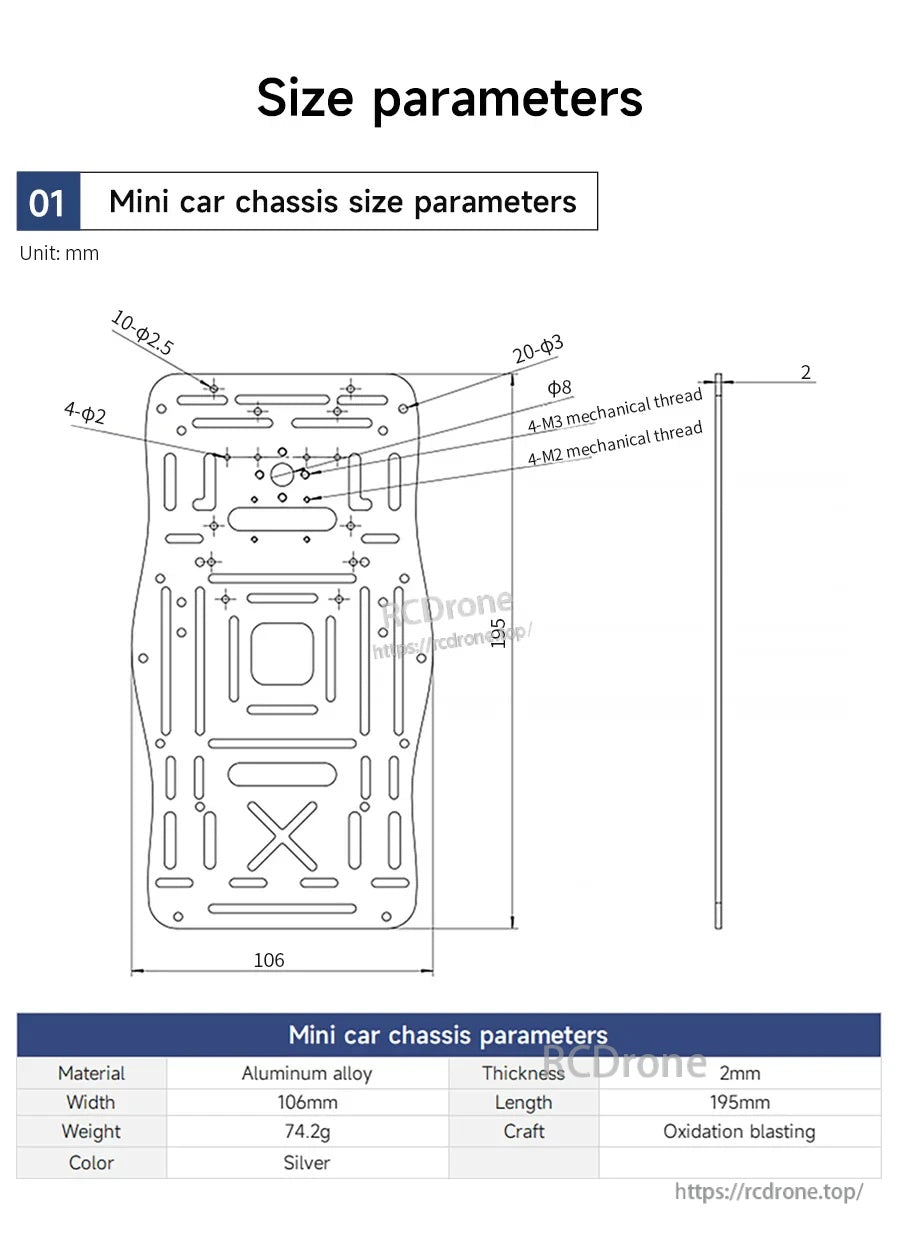
يستخدم هيكل السيارة المصغرة لوحة من سبيكة الألومنيوم بحجم 195 × 106 مم (سماكة 2 مم) مع نقاط تركيب مشقوقة وثقوب ملولبة M2/M3 لتسهيل التجميع.
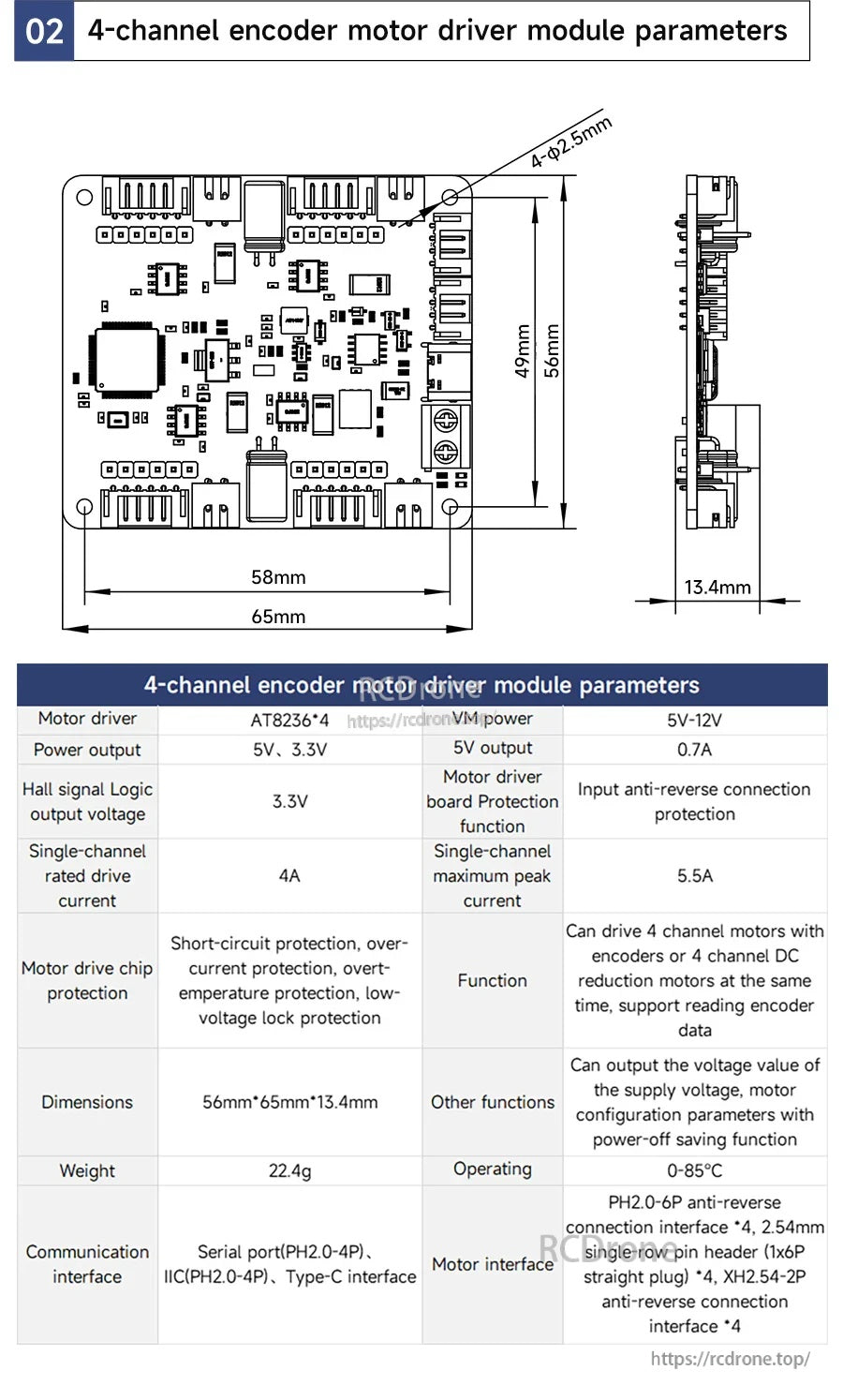
يدعم وحدة محرك التشفير ذات القنوات الأربع مدخلات 5–12V، ومحرك 6.5A، واتصالات I2C/serial بالإضافة إلى Type‑C لبناء الروبوتات.
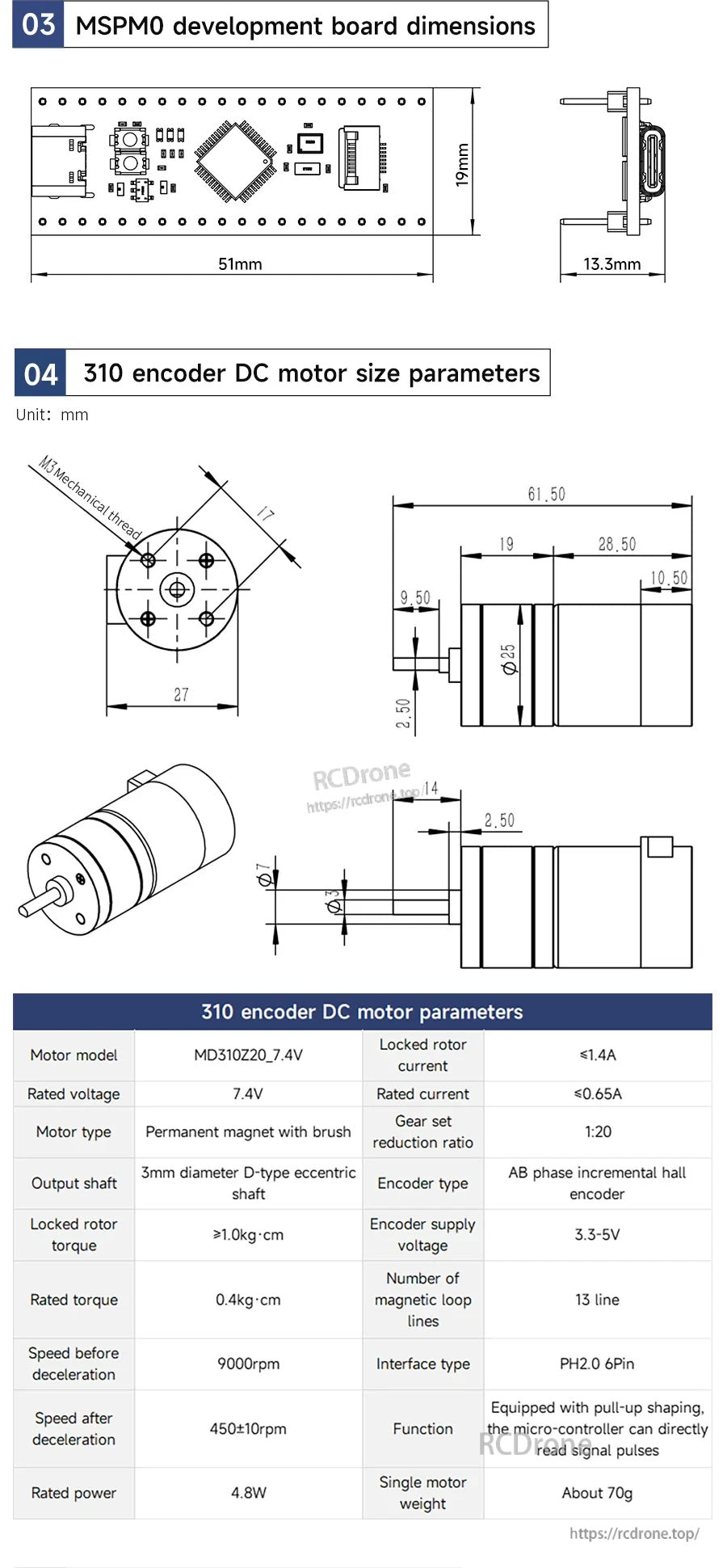
تساعد أبعاد لوحة تطوير MSPM0 وتفاصيل حجم محرك التشفير 310 في التخطيط للتركيب والأسلاك في بناء الروبوت المصغر ذو العجلات.
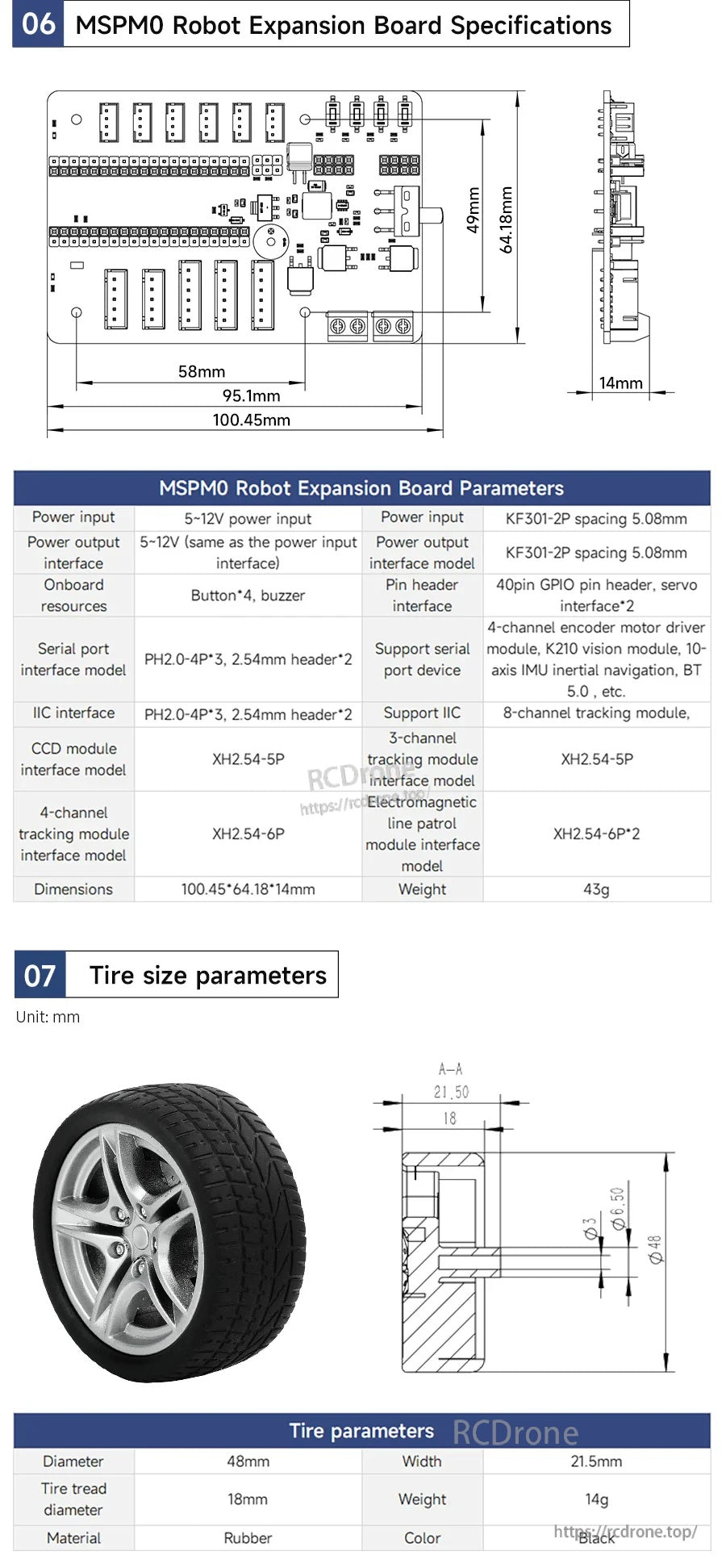
يستخدم حامل المحرك المعدني على شكل L لوحة بسماكة 3 مم مع ثقوب تركيب متعددة لتثبيت محرك التشفير 310.
تحدد مواصفات الروبوت الصغير ذو العجلات تخطيط لوحة التوسعة وتفاصيل الحجم الرئيسية، بما في ذلك قطر الإطار 48 مم وعرض الإطار 27.5 مم.

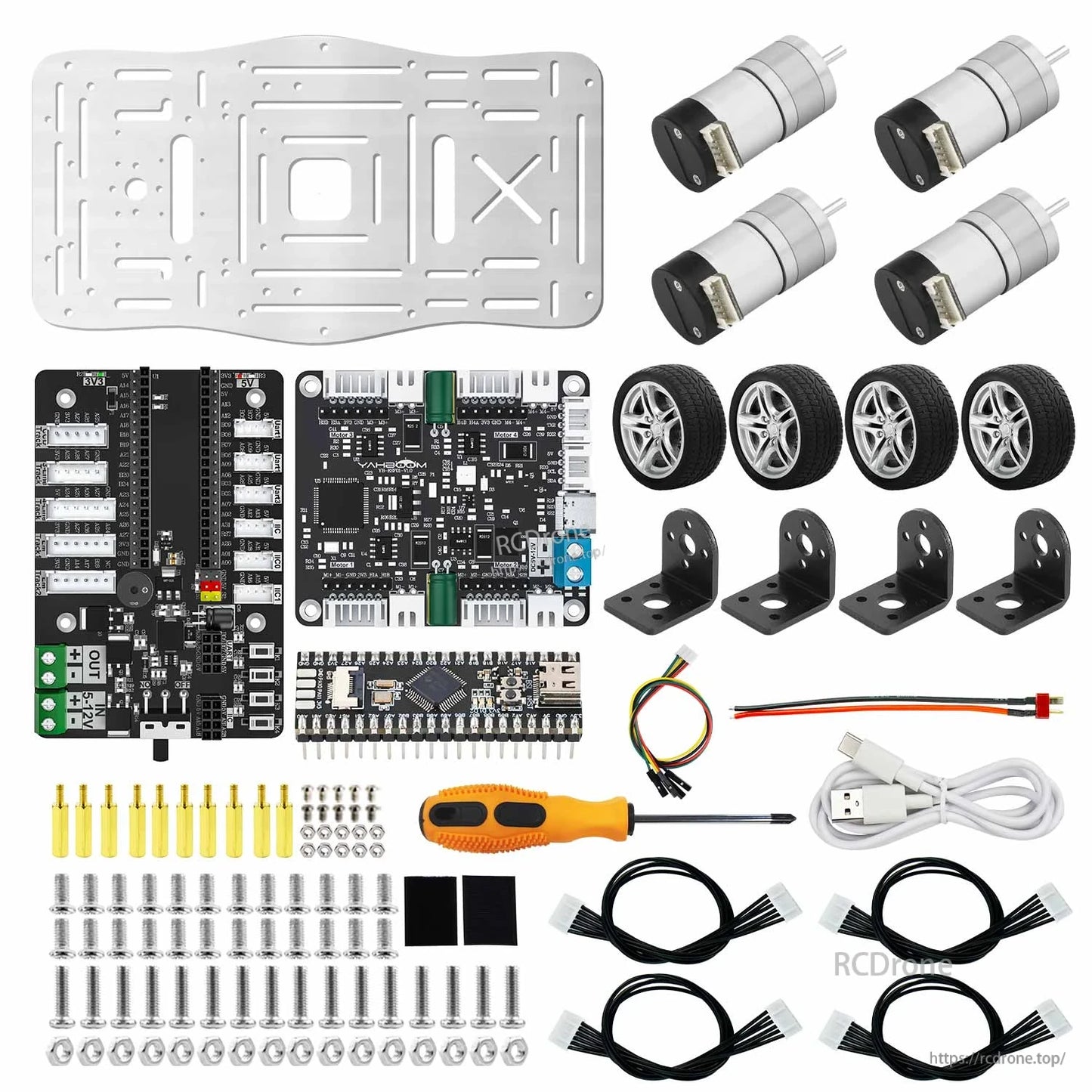
يظهر هيكل الروبوت الصغير ذو العجلات من Yahboom كمجموعة مفككة مع أربع عجلات ومحرك وحوامل للتجميع الذاتي.

يوفر تطبيق التحكم عن بعد Yahboom BT لأجهزة iOS وAndroid شاشة تحكم رئيسية بالإضافة إلى واجهات حالة المستشعر واختيار الوضع.
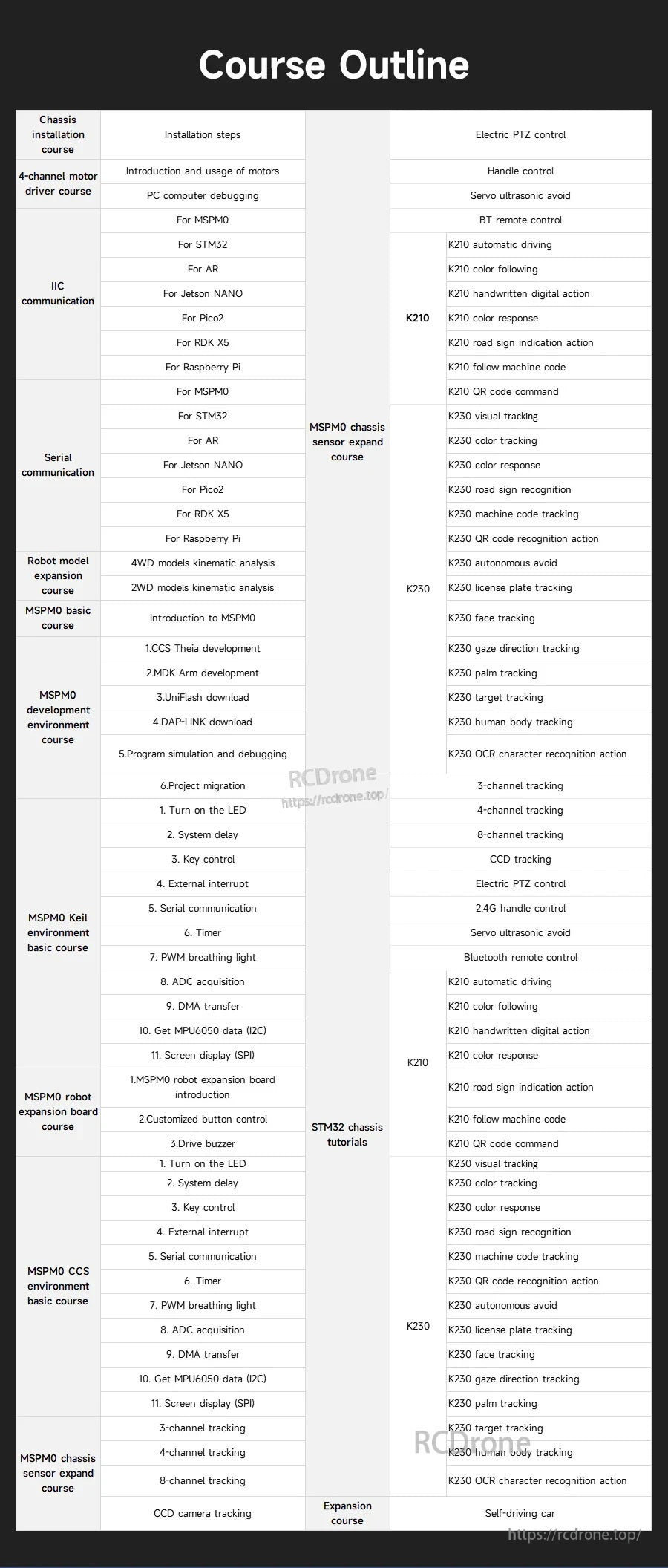
يساعد مخطط الدورة التفصيلي في توجيه الإعداد وممارسة البرمجة وتجارب الوحدات للروبوت الصغير ذو العجلات.
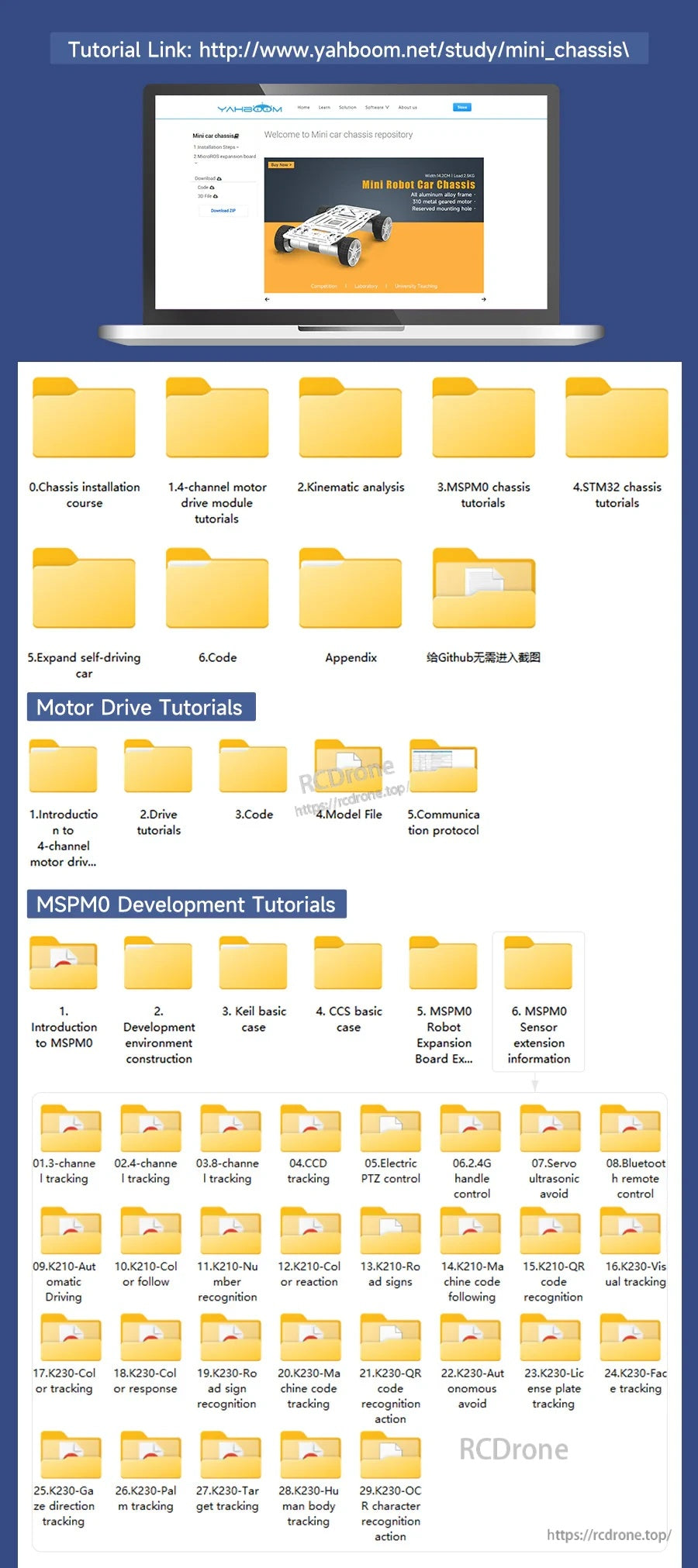
تجمع موارد Yahboom التعليمية عبر الإنترنت ملفات الهيكل الصغير وأدلة محرك المحرك والتطوير ذات الصلة لتسهيل الإعداد والتعلم.
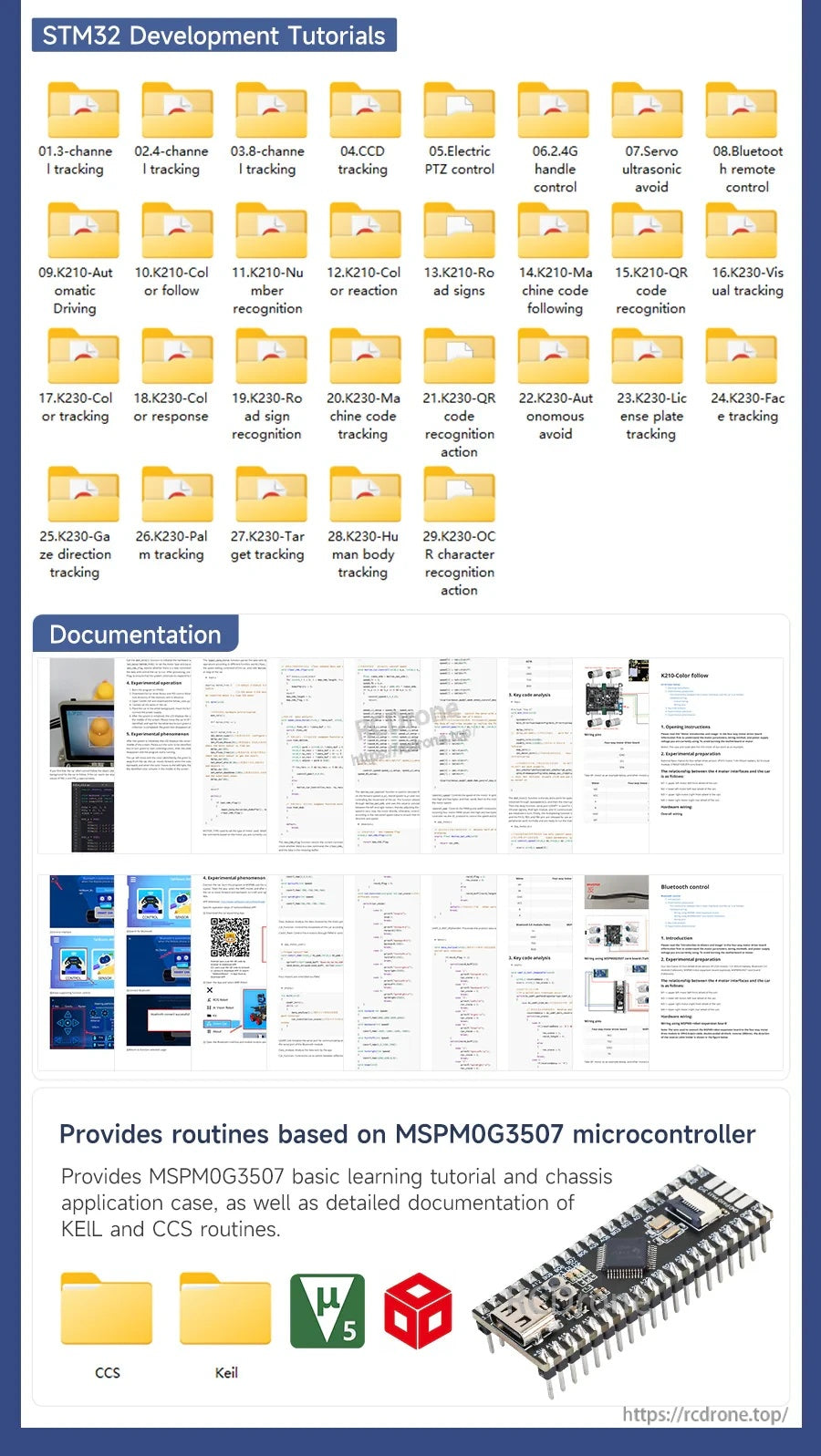
توفر دروس وتوثيقات تطوير STM32 روتينات جاهزة للاستخدام ومواد مرجعية للبدء مع لوحة التحكم.
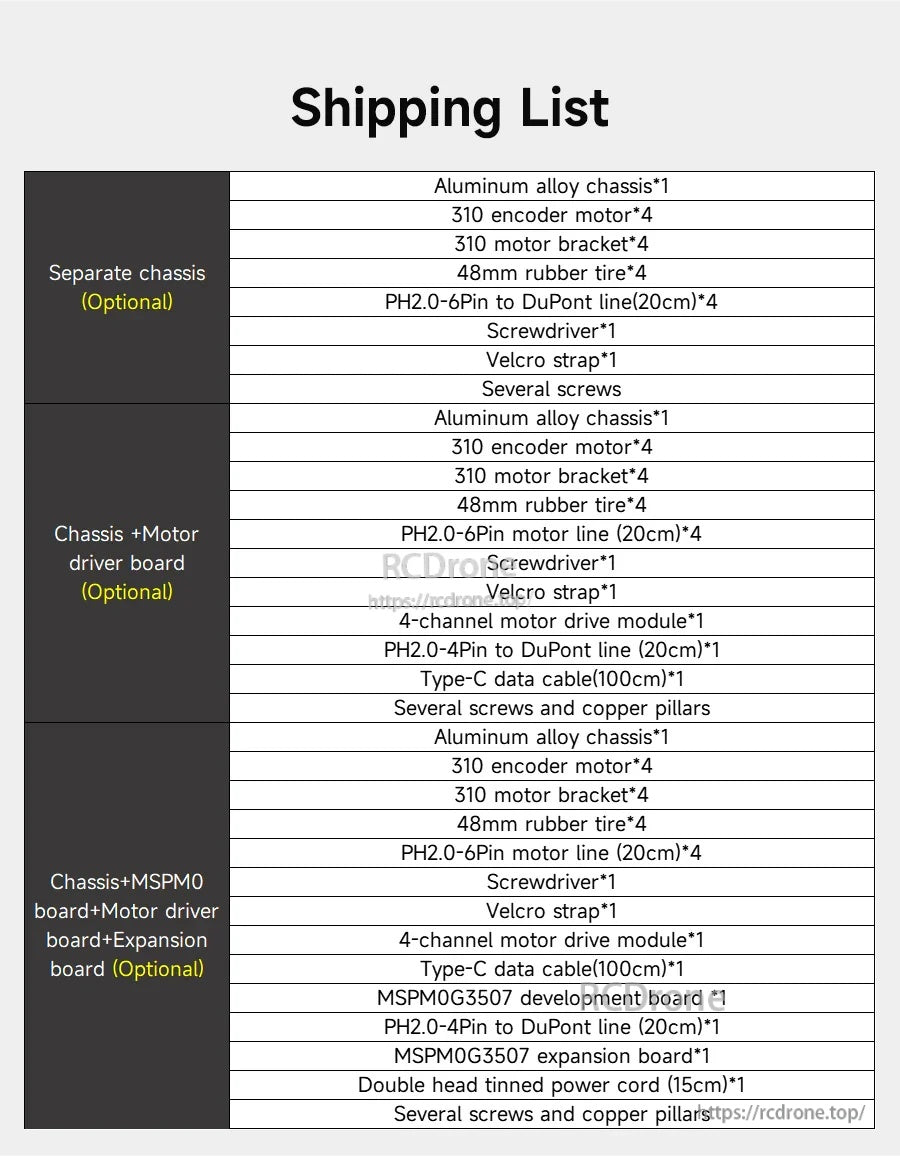
تشمل قائمة أجزاء المجموعة هيكل من سبائك الألومنيوم، محركات مشفرة 310 مع إطارات مطاطية 48 مم، أسلاك، براغي، ولوحات قيادة وتوسعة اختيارية.
Related Collections