















روبوت Yahboom ROSMASTER M3 Pro ROS2 مع وكيل ذكاء اصطناعي OpenClaw، مزدوج TOF LiDAR، ذراع 6DOF، عجلات ميكانيوم SLAM
روبوت Yahboom ROSMASTER M3 Pro ROS2 مع وكيل ذكاء اصطناعي OpenClaw، مزدوج TOF LiDAR، ذراع 6DOF، عجلات ميكانيوم SLAM
Yahboom
تعذر تحميل توفر الالتقاط
نظرة عامة
ROSMASTER M3 Pro هو منصة روبوت ROS2 من Yahboom للتعليم في مجال ROS، والتجارب العلمية، وتعليم تطبيقات الذكاء الاصطناعي. يستخدم هيكل عجلات ميكانوم مع تعليق بندولي للحركة في جميع الاتجاهات وتم تطويره على ROS2 Humble. تدمج المنصة ذراع روبوتية 6DOF، وكاميرا عمق ذات ضوء هيكلي ثنائي العينين لتكامل الرؤية ثلاثية الأبعاد بين اليد والعين، واثنين من TOF LiDAR لرسم خرائط SLAM في جميع الاتجاهات، والتنقل الذاتي، وتجنب العقبات، وتخطيط المسار. كما تدعم التفاعل مع نماذج الذكاء الاصطناعي متعددة الوسائط (نص/صورة/صوت) مع التعرف على الكلام وفهم اللغة الطبيعية لتخطيط المهام وتنفيذها.
الميزات الرئيسية
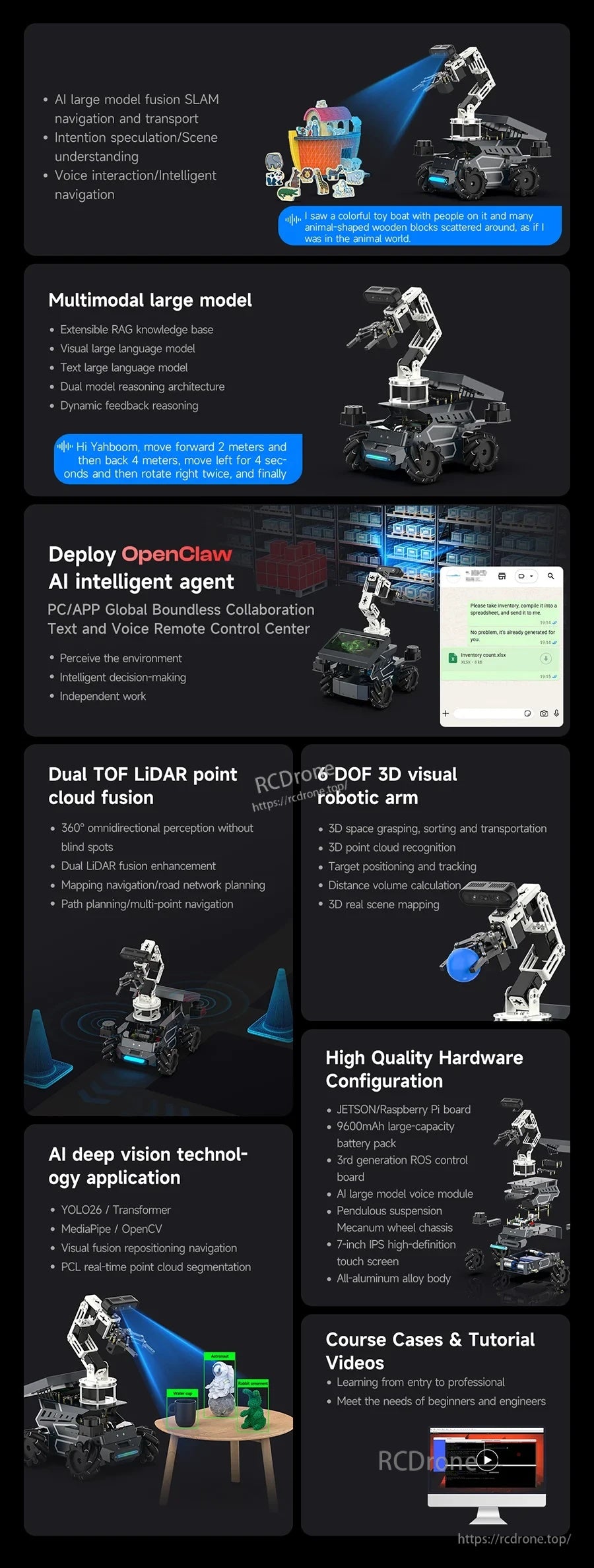
- نشر وكيل OpenClaw AI (مع دليل النشر والاستخدام). ملاحظة: لا يتم دعم نشر OpenClaw على إصدار Jetson Nano B01.
- قدرات النموذج الكبير المضمن متعدد الوسائط: قاعدة معرفة RAG قابلة للتوسيع، نموذج لغة كبير بصري، نموذج لغة كبير نصي، بنية استدلال ثنائية النموذج، واستدلال التغذية الراجعة الديناميكي.
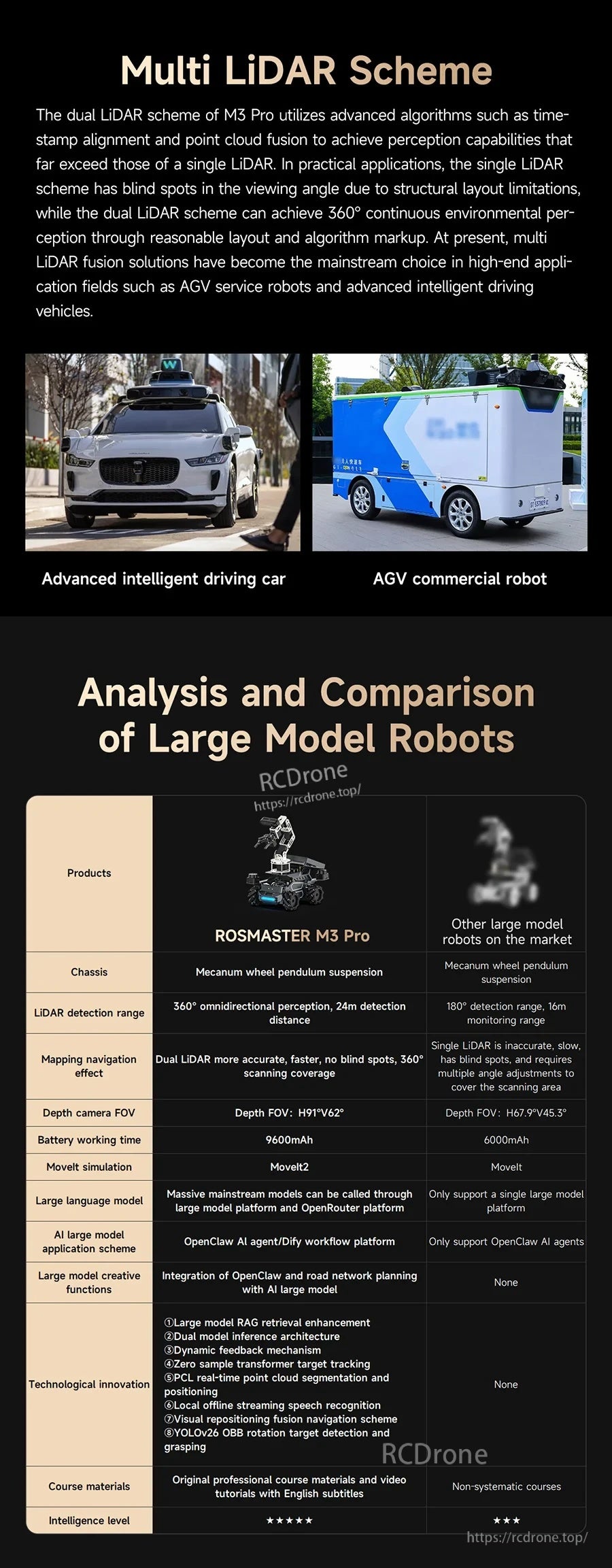
- دمج سحابة النقاط LiDAR ثنائية TOF: إدراك شامل بزاوية 360° بدون نقاط عمياء؛ تخطيط شبكة الطرق/الملاحة؛ تخطيط المسار والملاحة متعددة النقاط.
- تخطيط شبكة الطرق: إنشاء وتحرير وإدارة شبكات الطرق المكونة من نقاط وخطوط ربط؛ يدعم اختيار أقصر مسار في شبكات الطرق بأسلوب الصندوق الرملي.
- ذراع روبوتية بصرية ثلاثية الأبعاد 6DOF: الإمساك والفرز والنقل في الفضاء ثلاثي الأبعاد؛ التعرف على سحابة النقاط ثلاثية الأبعاد؛ تحديد وتتبع الأهداف؛ حساب المسافة/الحجم؛ رسم الخرائط ثلاثي الأبعاد للواقع الحقيقي.
- تطبيقات تقنية الرؤية العميقة: YOLOv26 / Transformer، MediaPipe / OpenCV، إعادة تموضع الدمج البصري للملاحة، تقسيم سحابة النقاط في الوقت الحقيقي PCL.
- وحدة صوت ونموذج AI مدمج ومكبر صوت: يدعم التحويل الفوري بين الصوت والنص.
- دعم محاكاة MoveIt2.
المواصفات
| النموذج | ROSMASTER M3 Pro |
| النظام | ROS2 Humble |
| الهيكل | جسم من سبائك الألومنيوم بالكامل؛ تعليق عجلة ميكانوم بندول؛ هيكل تعليق بندول للعجلات الخلفية |
| حجم العجلة | عجلات ميكانوم 80 مم |
| ليدار | ليدار TOF مزدوج (تخطيط إزاحة قطري: أمامي يمين + خلفي يسار)؛ مسح 360° |
| كشف ليدار (من جدول المقارنة) | إدراك شامل 360°؛ مسافة كشف 24 متر |
| كاميرا العمق | كاميرا عمق ضوئية ثنائية العدسة |
| مجال رؤية كاميرا العمق (من جدول المقارنة) | H91° V62° |
| الذراع الروبوتية | ذراع روبوتي 6DOF؛ 6PCS محركات سيرفو ذكية تسلسلية (تدعم قراءة الموضع/الحالة ومعلومات أخرى) |
| قدرة القابض (من وصف الذراع) | يقبض حتى 410 جرام؛ دقة تحديد الموقع المتكررة 0.5mm |
| بطارية | حزمة بطارية بسعة عالية 9600mAh |
| شاشة لمس | شاشة لمس عالية الدقة IPS بحجم 7 بوصات (اختياري)؛ متغيرات التكوين المعروضة: مع شاشة / بدون شاشة |
| محركات | محرك معدني مع مشفر عزم دوران عالي؛ تعليق مستقل متأرجح مع محرك عزم دوران عالي |
| لوحة تحكم ROS | لوحة تحكم ROS الجيل الثالث |
| MoveIt | MoveIt2 |
| خطط تطبيقات النماذج الكبيرة للذكاء الاصطناعي | وكيل OpenClaw AI؛ منصة Dify الاختيارية للتدفق العملي |
| وكيل OpenClaw AI – التحكم الرئيسي المدعوم | Raspberry Pi 5؛ Jetson Orin Nano SUPER؛ Jetson Orin NX SUPER |
| وكيل OpenClaw AI – طرق التفاعل | الصوت، WAP، أوامر نصية عبر الويب/الطرفية |
| وضع التحكم في الروبوت – وكيل OpenClaw AI | MCP, CLI |
| منصة تدفق العمل Dify – التحكم الرئيسي المدعوم | Raspberry Pi 5; Jetson Orin Nano SUPER; Jetson Orin NX SUPER; Jetson Nano B01 |
| منصة تدفق العمل Dify – وضع التحكم في الروبوت | http |
| خوارزمية تتبع بصري AI (من مقارنة الحلول) | OpenClaw: نموذج Transformer; Dify: KCF |
| سيناريو نموذج AI كبير اختياري / خريطة طاولة الرمل | الحجم: 3م × 4.1م (ملحق اختياري؛ غير مشمول مع ROSMASTER M3 Pro) |
خيارات لوحة التحكم الرئيسية (للاختيار)
| الخيار | المواصفات الرئيسية للحوسبة المعروضة | الطاقة (المعروضة) | نظام ROS (المعروض) | OpenClaw (المعروض) |
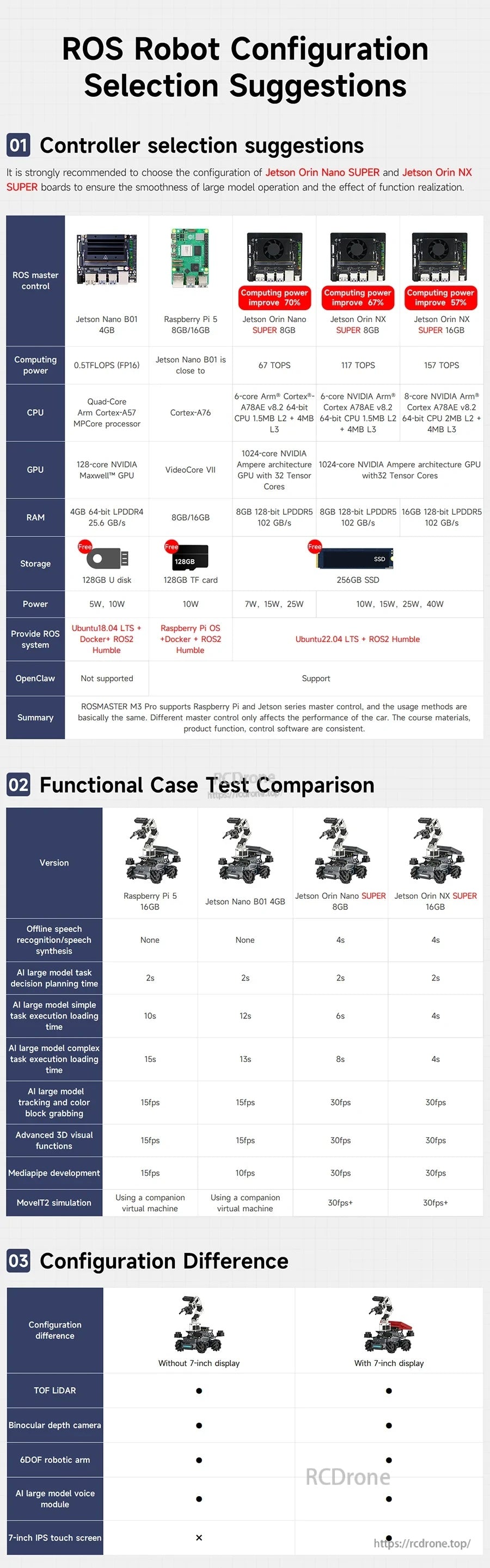
| Jetson Nano B01 4GB | 0.5 TFLOPS (FP16); رباعي النواة Arm Cortex-A57 MPCore; 128-core NVIDIA Maxwell GPU; 4GB 64-bit LPDDR4 (25.6 GB/s) | 5W, 10W | Ubuntu 18.04 LTS + Docker + ROS2 Humble | غير مدعوم |
| Raspberry Pi 5 (8GB/16GB) | Cortex-A76; VideoCore VII; RAM: 8GB/16GB | 10W | Raspberry Pi OS + Docker + ROS2 Humble | (انظر ملاحظة دعم OpenClaw أعلاه) |
| Jetson Orin Nano SUPER 8GB | 67 TOPS; 6-core Arm Cortex-A78AE v8.2 64-bit CPU (1.5MB L2 + 4MB L3); 1024-core NVIDIA Ampere GPU with 32 Tensor Cores; 8GB 128-bit LPDDR5 (102 GB/s) | 7W, 15W, 25W | أوبونتو 22.04 LTS + ROS2 Humble | الدعم |
| Jetson Orin NX SUPER 8GB | 117 TOPS; 6-core NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU (1.5MB L2 + 4MB L3); 1024-core NVIDIA Ampere GPU with 32 Tensor Cores; 8GB 128-bit LPDDR5 (102 GB/s) | 10W, 15W, 25W, 40W | أوبونتو 22.04 LTS + ROS2 Humble | الدعم |
| Jetson Orin NX SUPER 16GB | 157 TOPS; 8-core NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU (2MB L2 + 4MB L3); 1024-core NVIDIA Ampere GPU with 32 Tensor Cores; 16GB 128-bit LPDDR5 (102 GB/s) | 10W, 15W, 25W, 40W | أوبونتو 22.04 LTS + ROS2 Humble | الدعم |
مقارنة اختبار الحالة الوظيفية (المعروضة)
| الإصدار | التعرف على الكلام دون اتصال / توليد الكلام | وقت تخطيط اتخاذ القرار لمهام النموذج الكبير للذكاء الاصطناعي | وقت تحميل المهام البسيطة | وقت تحميل المهام المعقدة | تتبع & التقاط الكتل الملونة | وظائف بصرية ثلاثية الأبعاد متقدمة | تطوير MediaPipe | محاكاة MoveIt2 |
| Raspberry Pi 5 16GB | لا شيء | 2s | 10s | 15s | 15fps | 15fps | 15fps | باستخدام آلة افتراضية مرافقة |
| Jetson Nano B01 4GB | لا شيء | 2s | 12s | 13s | 15fps | 15fps | 10fps | باستخدام آلة افتراضية مرافقة |
| Jetson Orin Nano SUPER 8GB | 4s | 2s | 6s | 8s | 30fps | 30fps | 30fps | 30fps+ |
| Jetson Orin NX SUPER 16GB | 4s | 2s | 4s | 4s | 30fps | 30fps | 30fps | 30fps+ |
للمساعدة في اختيار التكوين (خيارات Raspberry Pi مقابل Jetson) أو دعم ما بعد البيع، اتصل بـ https://rcdrone.top/ أو أرسل بريدًا إلكترونيًا إلى [email protected] .
التطبيقات
- التعليم والمختبرات باستخدام ROS2: رسم الخرائط SLAM، الملاحة، تجنب العقبات، وتخطيط شبكات الطرق.
- التلاعب بالرؤية ثلاثية الأبعاد &: التعرف/الإمساك ثلاثي الأبعاد، الفرز، التتبع، والمعالجة باستخدام ذراع 6DOF وسحابة النقاط العميقة.
- التفاعل الذكي متعدد الوسائط: التفاعل الصوتي/النصي/الصوري مع تفكيك المهام، الجدولة طويلة الأمد، البحث في الذاكرة، ومنطق الاستجابة الاستباقية (سير عمل OpenClaw).
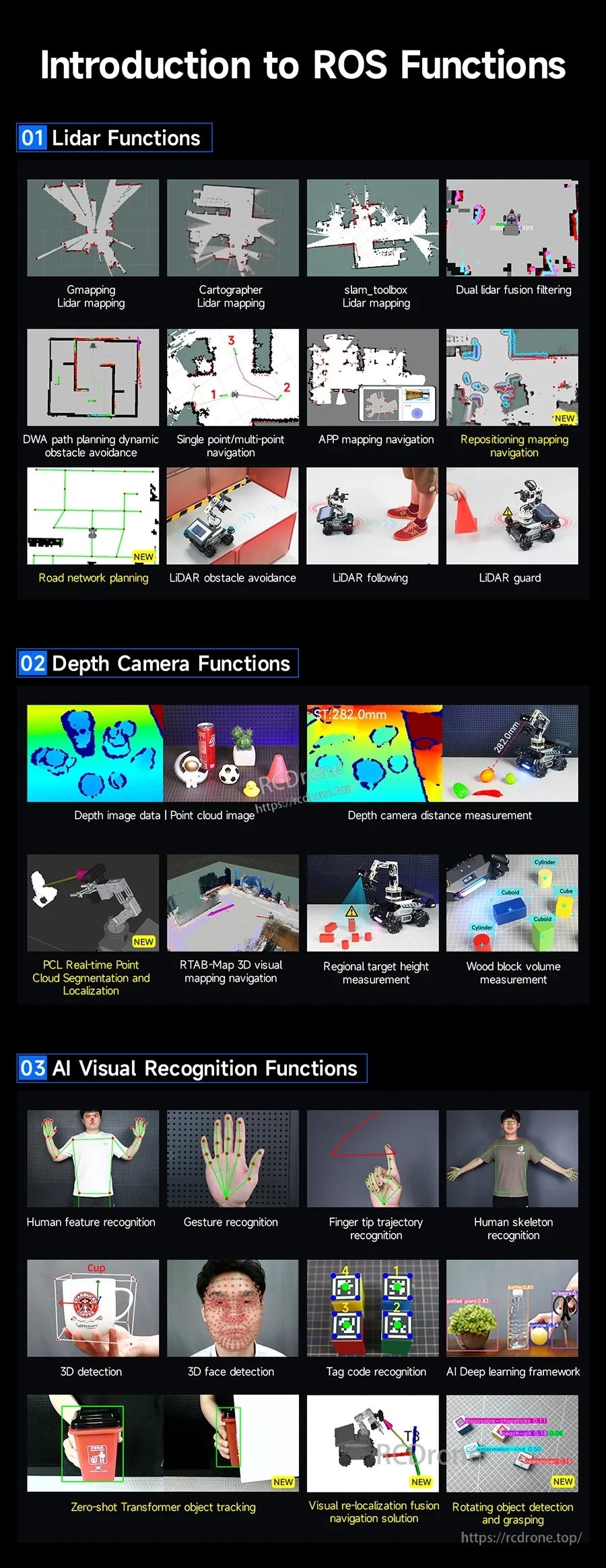
- التعرف البصري الذكي (الأمثلة المعروضة): التعرف على ميزات الإنسان، التعرف على الإيماءات، التعرف على مسار أطراف الأصابع، التعرف على هيكل الإنسان، الكشف ثلاثي الأبعاد، الكشف عن الوجه ثلاثي الأبعاد، التعرف على رموز العلامات، تتبع الأجسام باستخدام Transformer بدون تدريب مسبق، حل الملاحة بالدمج البصري لإعادة التوطين، الكشف عن الأجسام الدوارة والإمساك بها.
- وظائف الكاميرا العميقة (أمثلة معروضة): صورة العمق/سحابة النقاط، قياس المسافة، تقسيم وتحديد موقع سحابة النقاط في الوقت الحقيقي باستخدام PCL، التنقل البصري ثلاثي الأبعاد باستخدام RTAB-Map، قياس ارتفاع الهدف الإقليمي، قياس حجم كتلة الخشب.
- وظائف LiDAR (أمثلة معروضة): رسم الخرائط باستخدام Gmapping/Cartographer/slam_toolbox، تصفية الدمج المزدوج لـ LiDAR، تجنب العقبات الديناميكي باستخدام DWA، التنقل بنقطة واحدة/متعددة النقاط، رسم الخرائط والتنقل عبر التطبيق، إعادة تحديد المواقع ورسم الخرائط، تخطيط شبكة الطرق، تجنب العقبات باستخدام LiDAR، المتابعة باستخدام LiDAR، الحراسة باستخدام LiDAR.
الكتيبات
- صفحة الدروس/الدراسة: https://www.yahboom.net/study/ROSMASTER-M3PRO
التفاصيل

منصة تعليمية شاملة لـ ROS2 Humble تجمع بين الحركة متعددة الاتجاهات، والرؤية ثلاثية الأبعاد، وذراع روبوتية بـ 6 درجات حرية.
تدعم ميزات التفاعل المتعدد الوسائط والاستقلالية رسم الخرائط، والتنقل، والإمساك، وتنفيذ المهام في منصة واحدة.
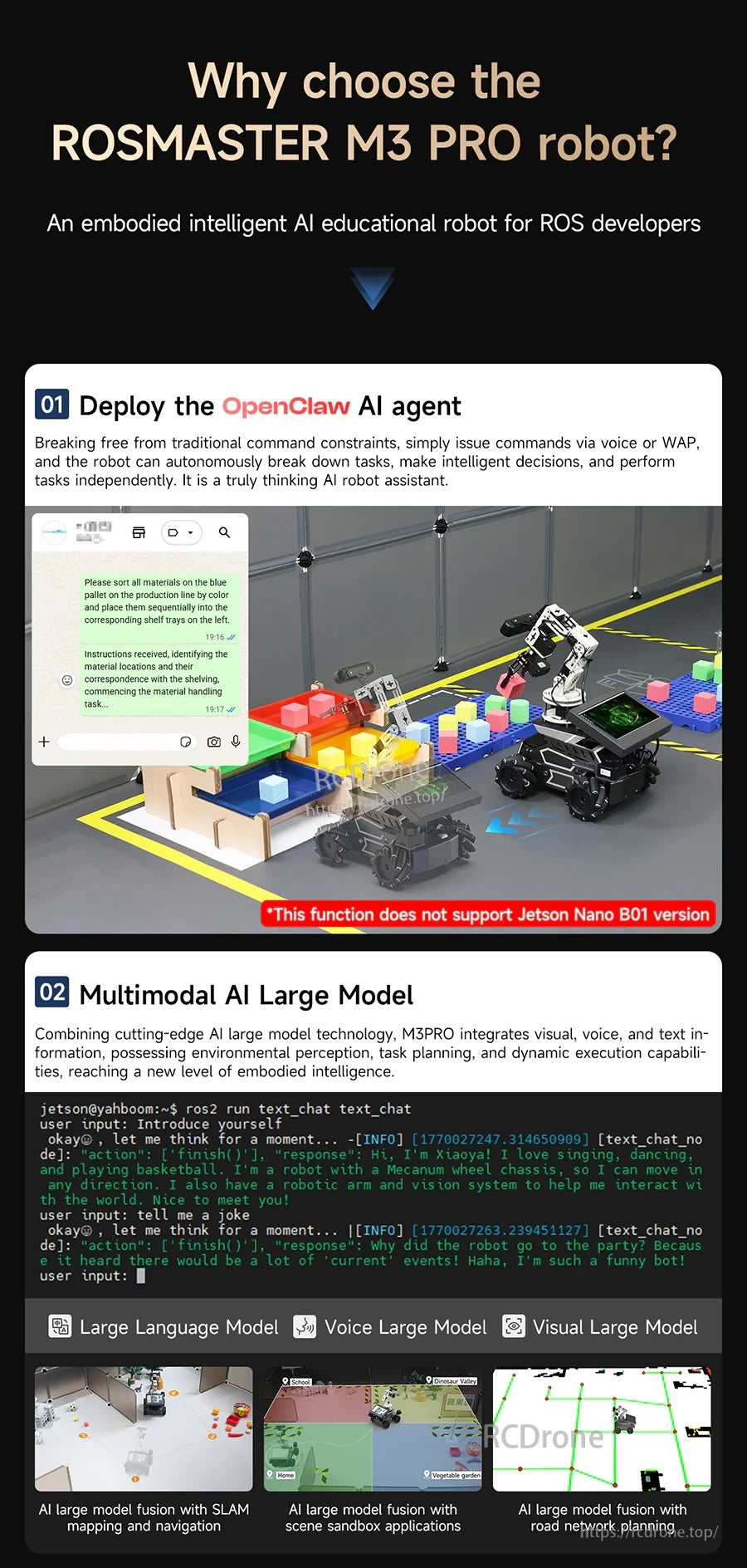
يتيح OpenClaw تخطيط المهام باستخدام اللغة الطبيعية مع خيارات للأوامر الصوتية، التطبيقية، والنصية.
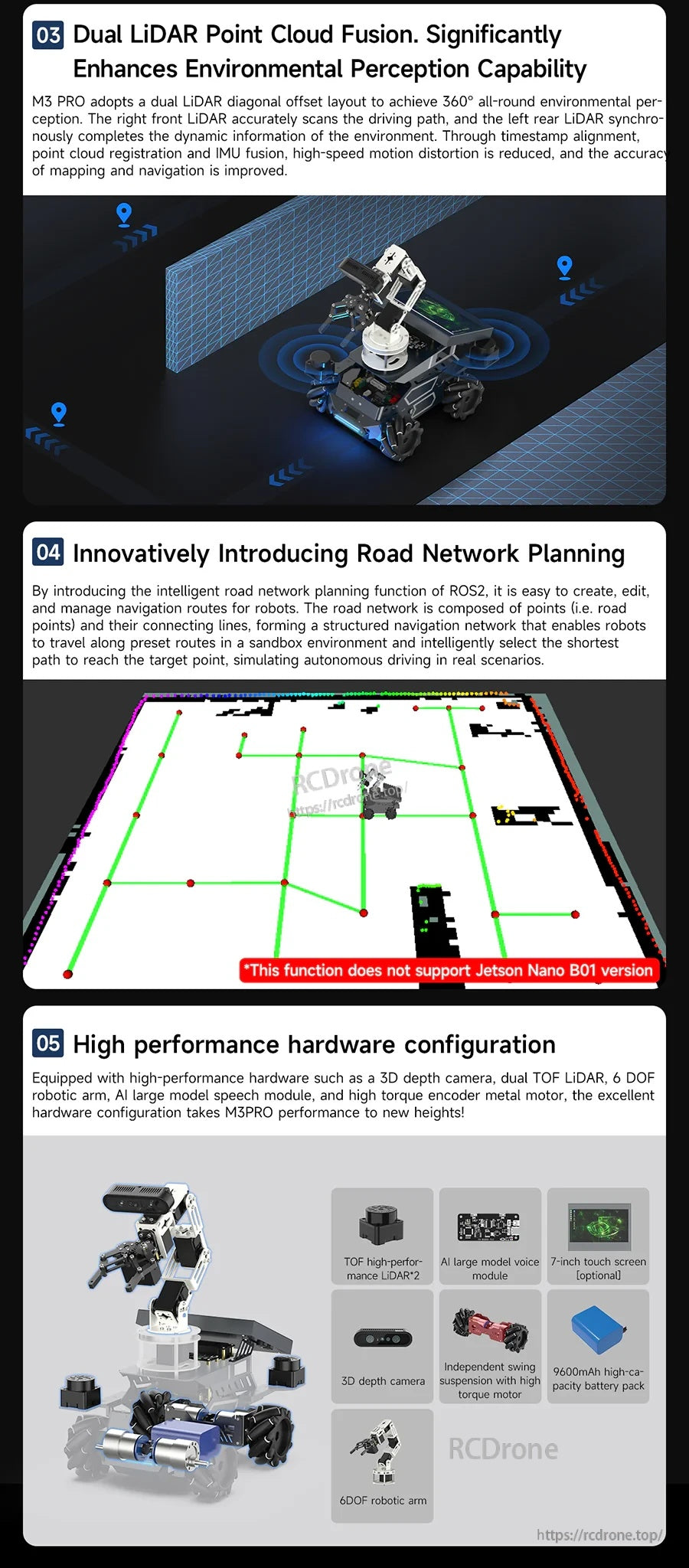
يوفر دمج TOF LiDAR المزدوج إدراكًا بزاوية 360° لرسم الخرائط SLAM، وتجنب العقبات، وتخطيط المسارات المرنة.
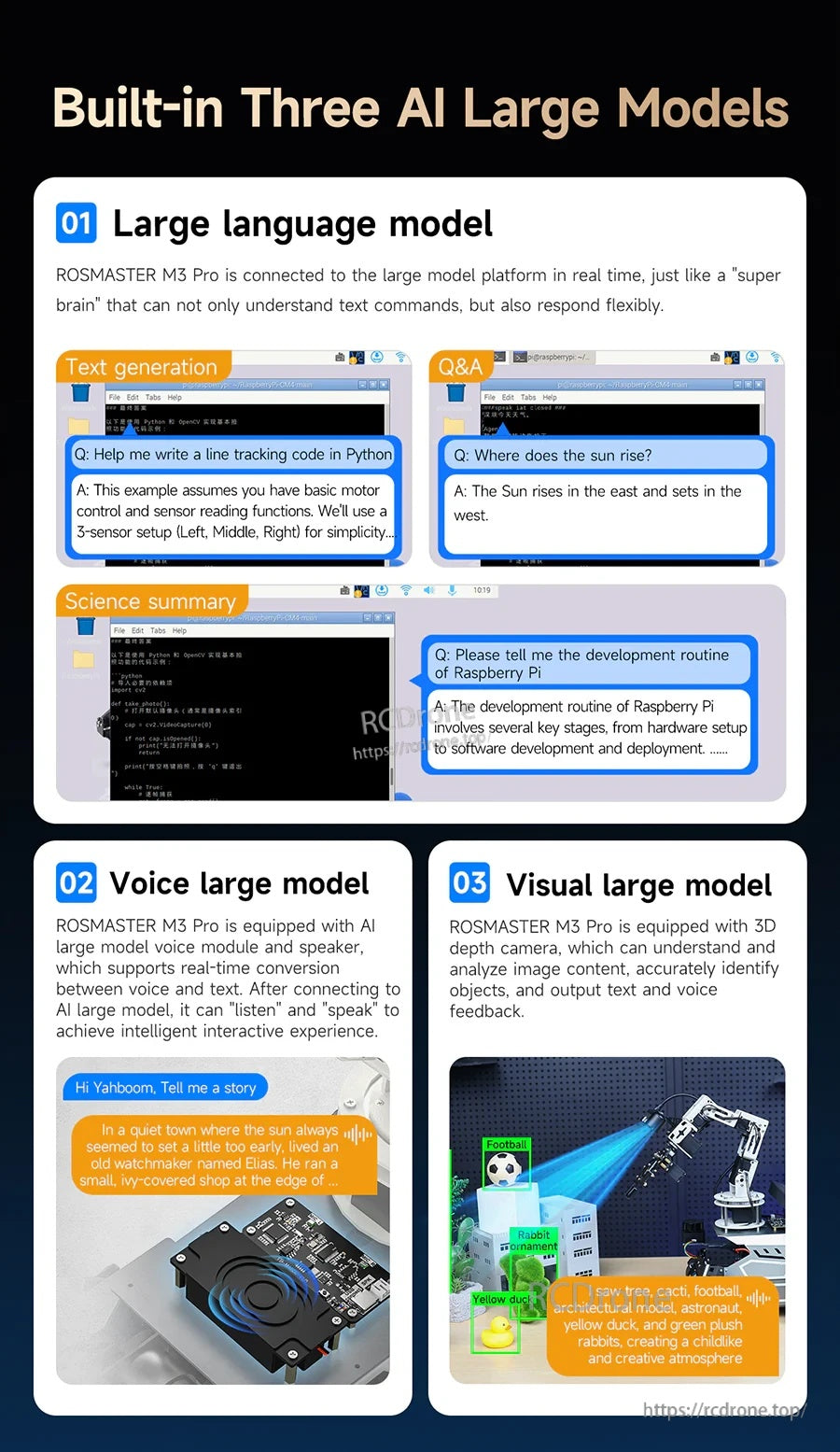
تغطي ثلاثة أنواع من النماذج المدمجة التفكير النصي، والتفاعل الصوتي، والفهم البصري لعروض الروبوتات الأكثر ثراءً.

اختر بين نشر OpenClaw المدمج أو منصة سير العمل الاختيارية بناءً على احتياجات مشروعك.
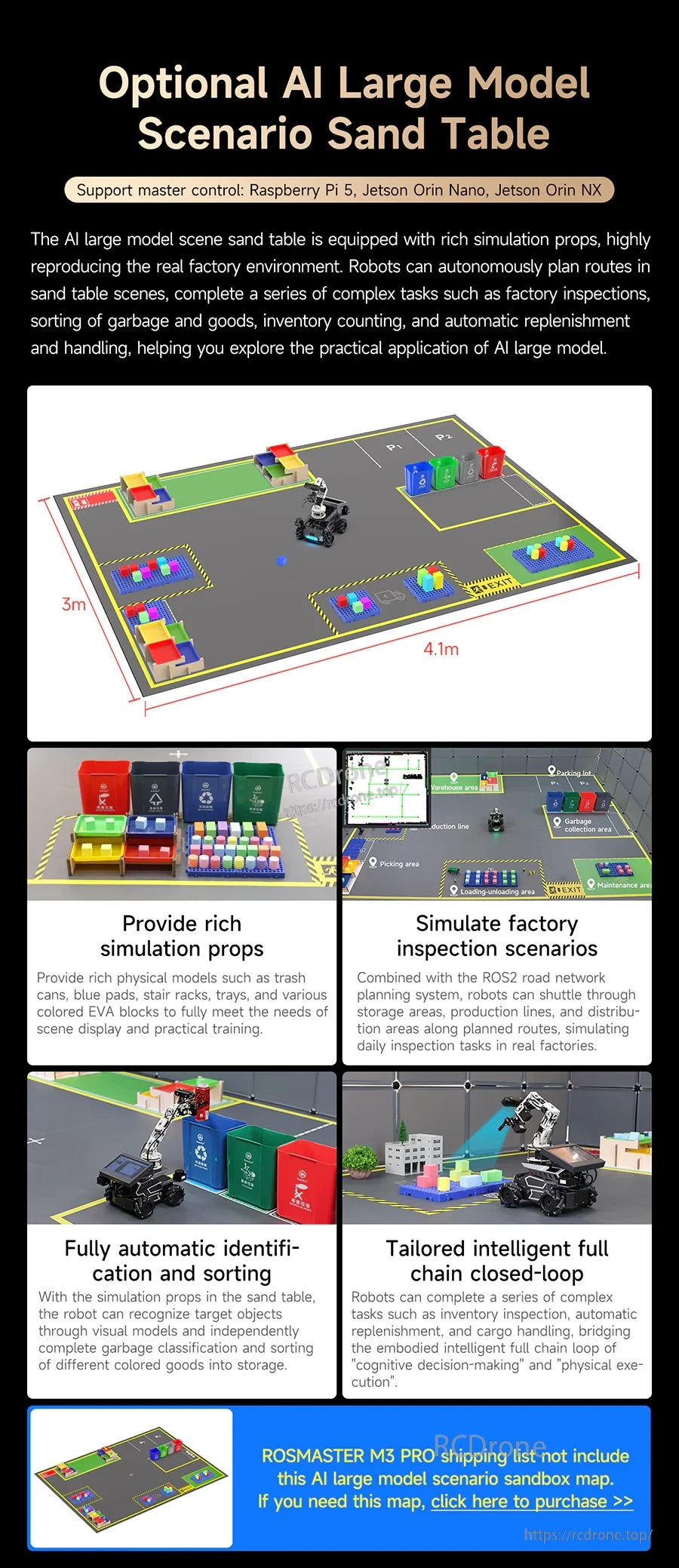
يدعم جدول السيناريوهات المعياري مشاهد التدريب القابلة للتكرار لتمارين الفرز، والعد، والملاحة.
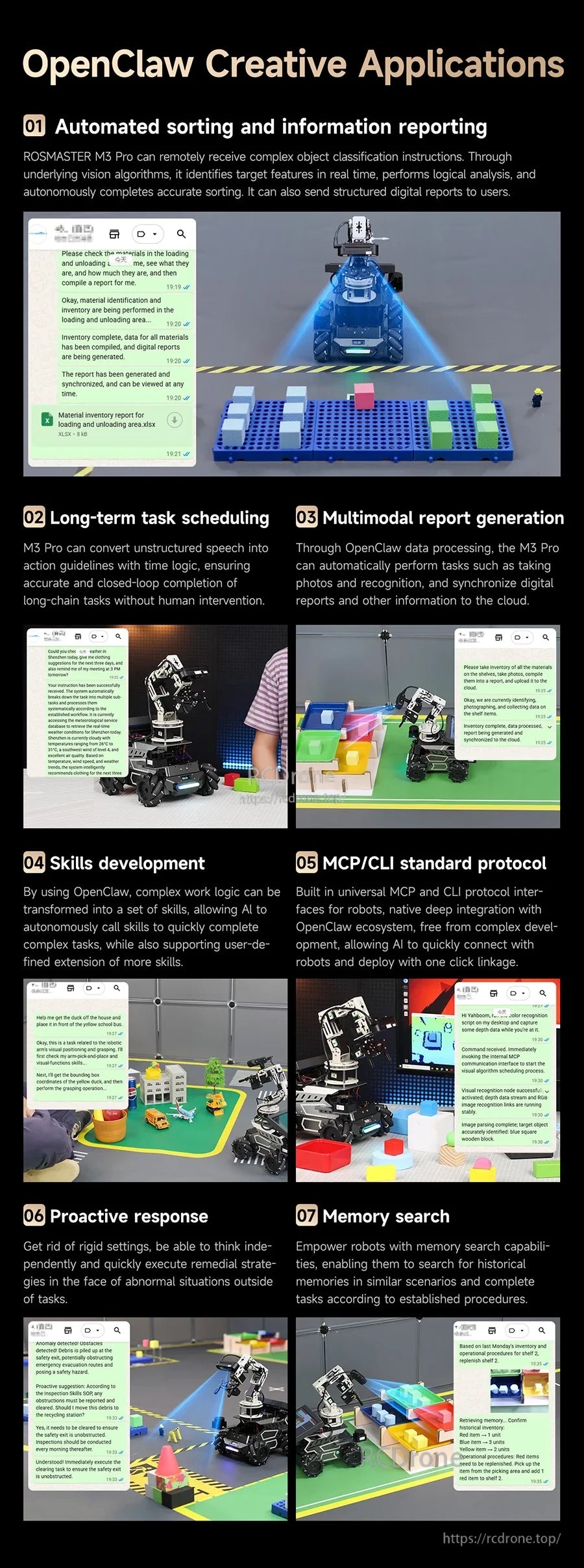
تسلط المشاريع النموذجية الضوء على كيفية تطبيق التحكم القائم على الوكيل في مهام المختبر اليومية والعروض التفاعلية.
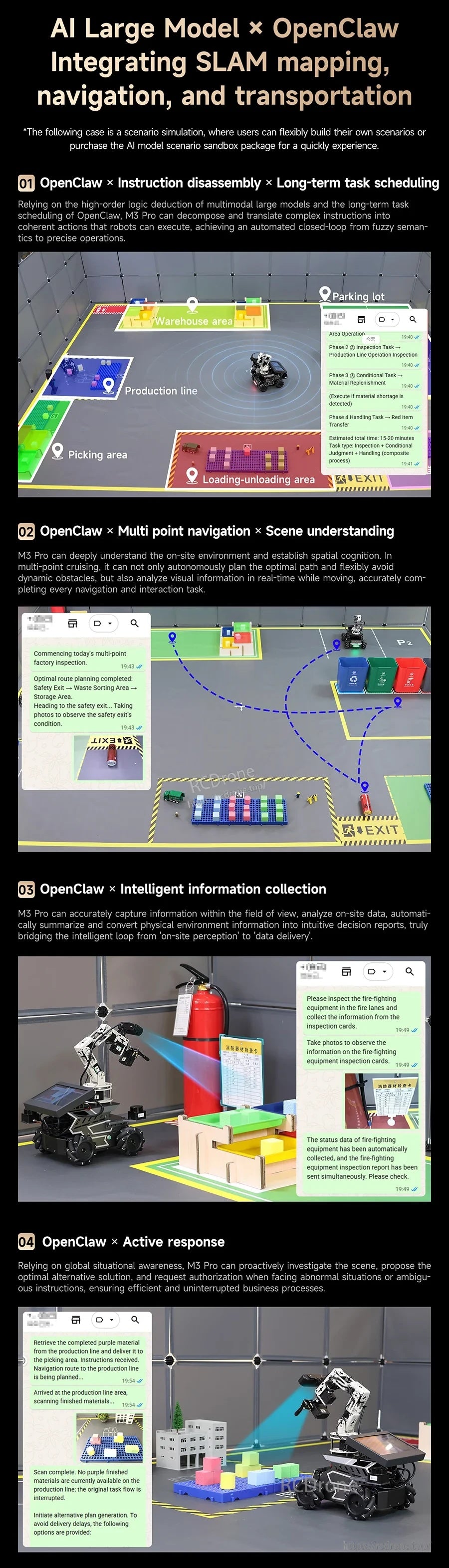
يمكن لوكالات سير العمل ربط التعليمات المستندة إلى الدردشة مع سلوكيات رسم الخرائط، والملاحة، والنقل.
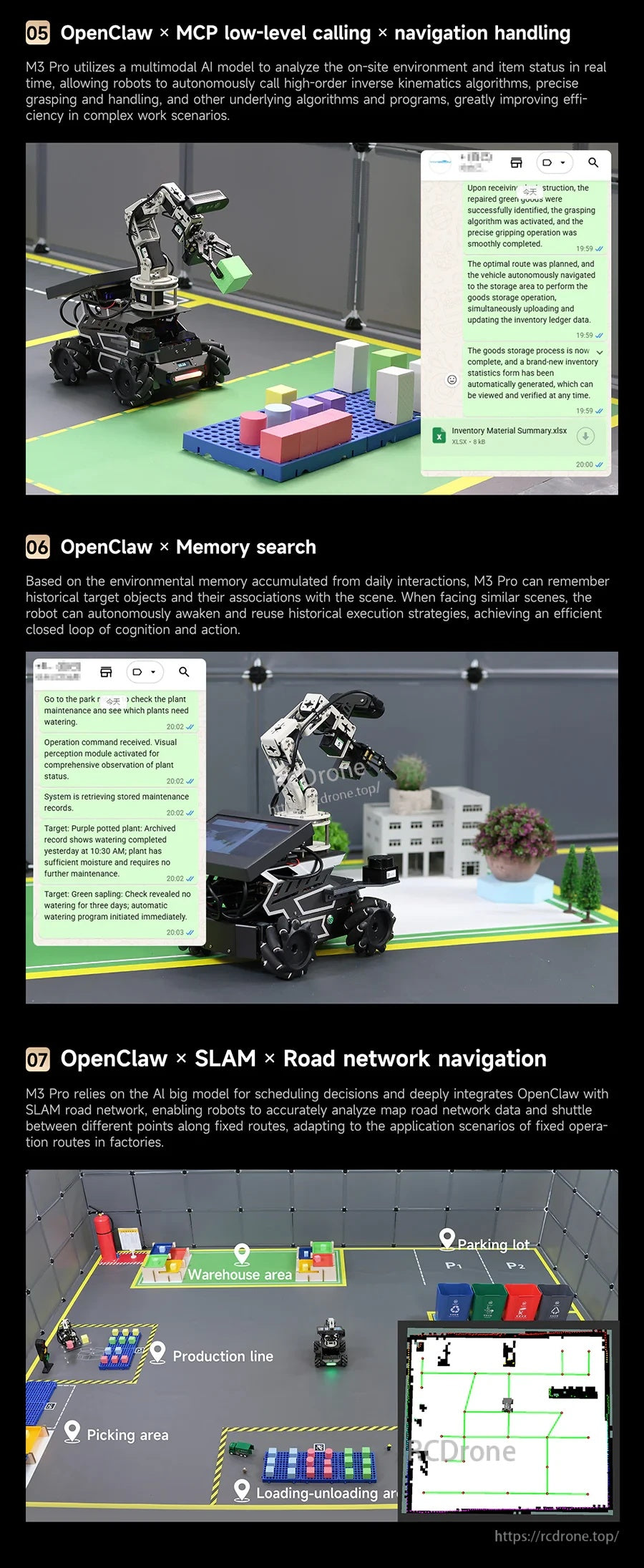
أدوات مثل البحث في الذاكرة واستدعاء نمط MCP تساعد في ربط النية العليا بأفعال الروبوت الموثوقة.
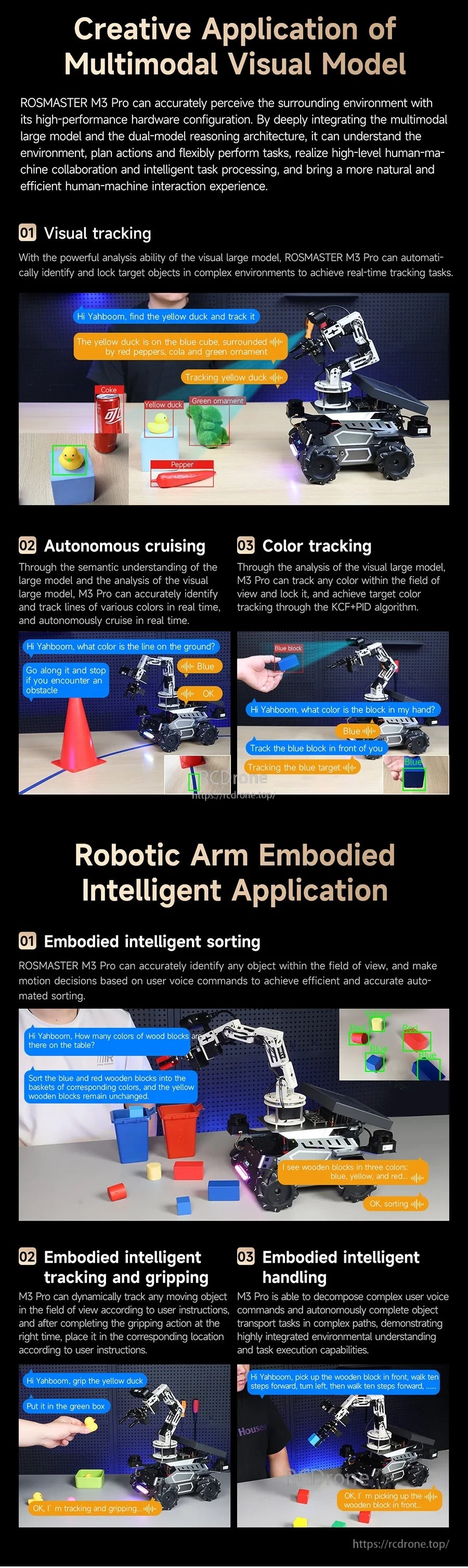
تشمل السلوكيات المدفوعة بالرؤية تتبع الأهداف، التعرف على الألوان، التجوال الذاتي، وتنسيق حركات الذراع.
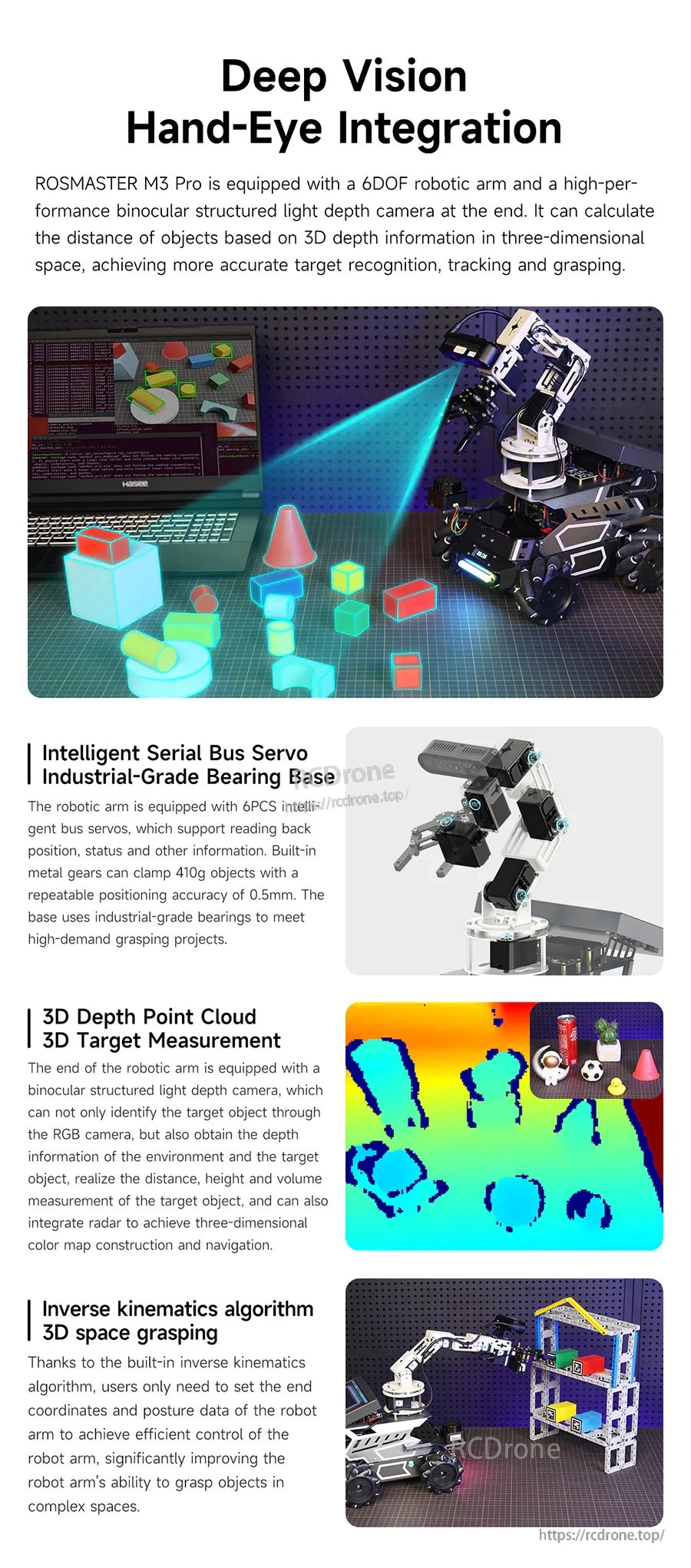
يدعم استشعار العمق بالضوء الهيكلي الثنائي التنسيق بين اليد والعين للقياس ثلاثي الأبعاد، والتعرف، والإمساك.
تساعد مقارنات التكوين في اختيار المجموعة الصحيحة من الاستشعار والحوسبة لفصلك الدراسي أو مختبرك.
يلخص دليل الاختيار التكوينات الشائعة والاختلافات عبر مجموعات الوظائف.
تغطي قدرات ROS الأساسية رسم الخرائط باستخدام LiDAR، وإدراك الكاميرا العميقة، وخطوط أنابيب التعرف البصري.
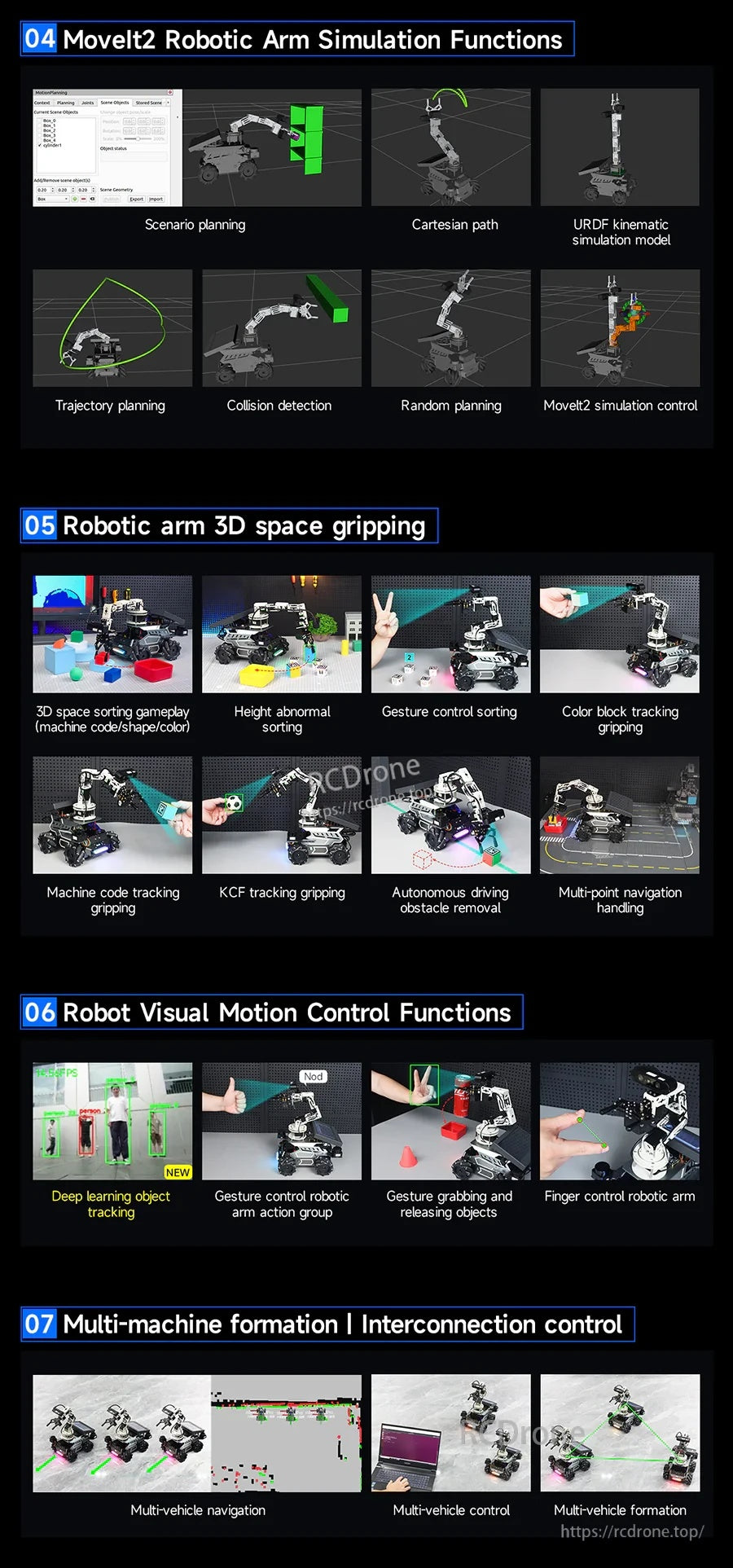
تدعم محاكاة MoveIt2 وعروض التحكم في الحركة تخطيط، سير عمل الإمساك، وتنسيق الروبوتات المتعددة.
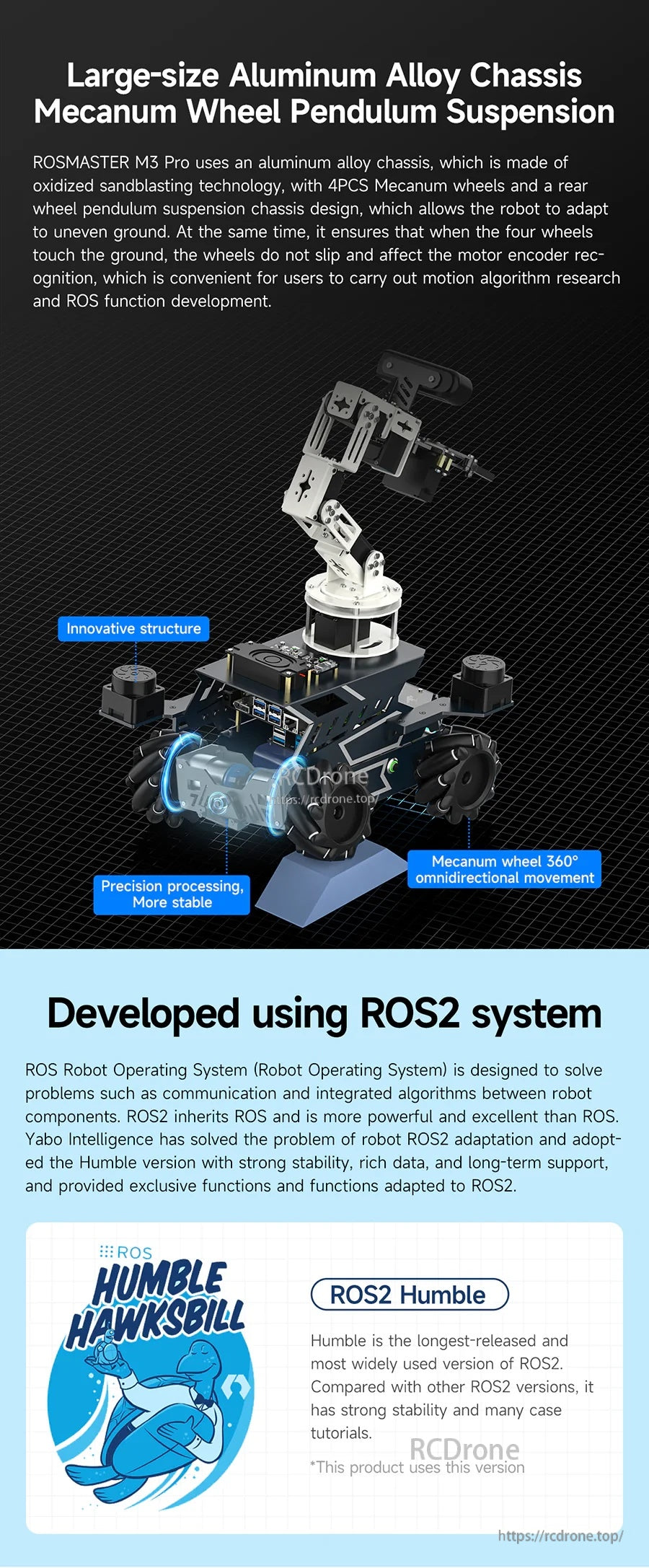
يعمل هيكل ميكانيكي من الألومنيوم مع تعليق بندولي على تحسين الاستقرار مع الحفاظ على التوافق الكامل مع ROS2 Humble.

تجعل طرق التحكم المتعددة وتخطيط الهيكل الواضح من السهل إعداد وصيانة وتوسيع الروبوت.
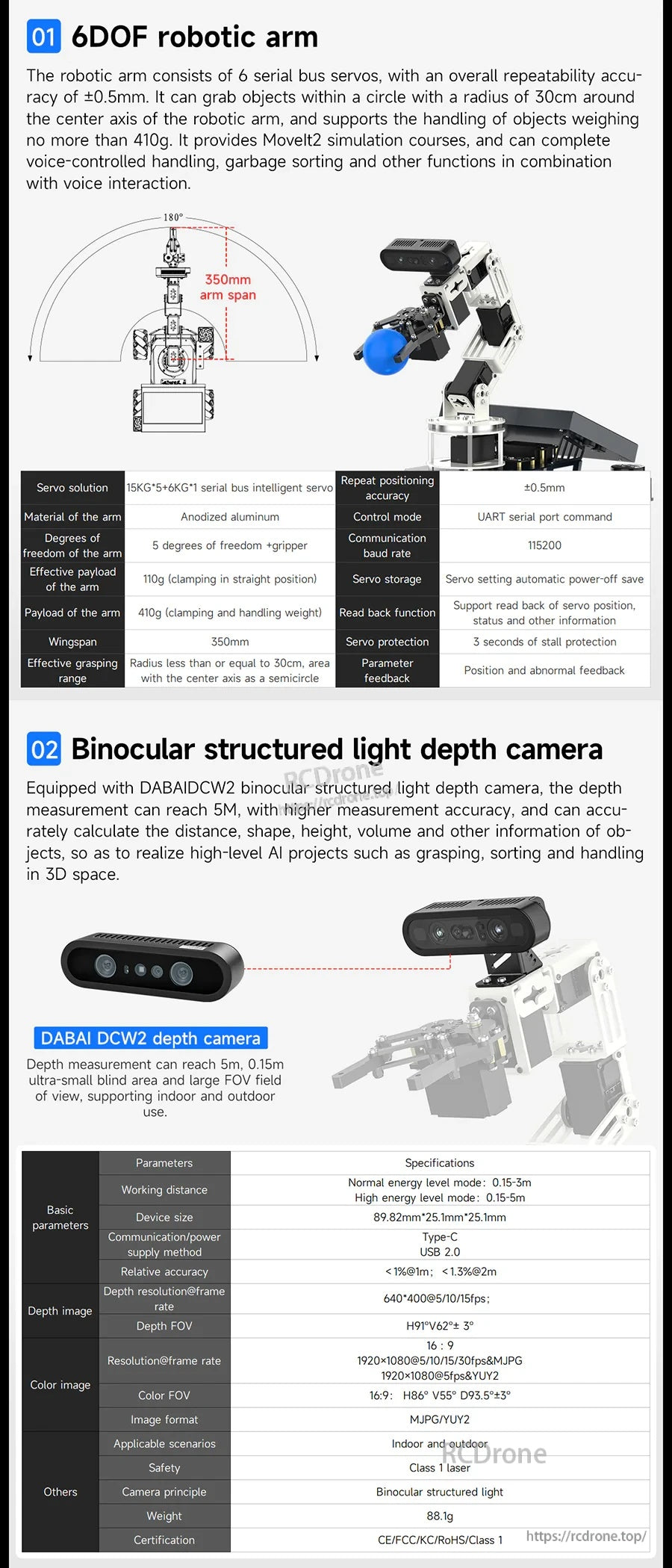
يمكن تكوين منصة ROSMASTER M3 Pro بذراع روبوتية 6DOF وكاميرا عمق ضوئي ثنائي العينين للمهام التي تعتمد على الإمساك والإدراك القائم على العمق.
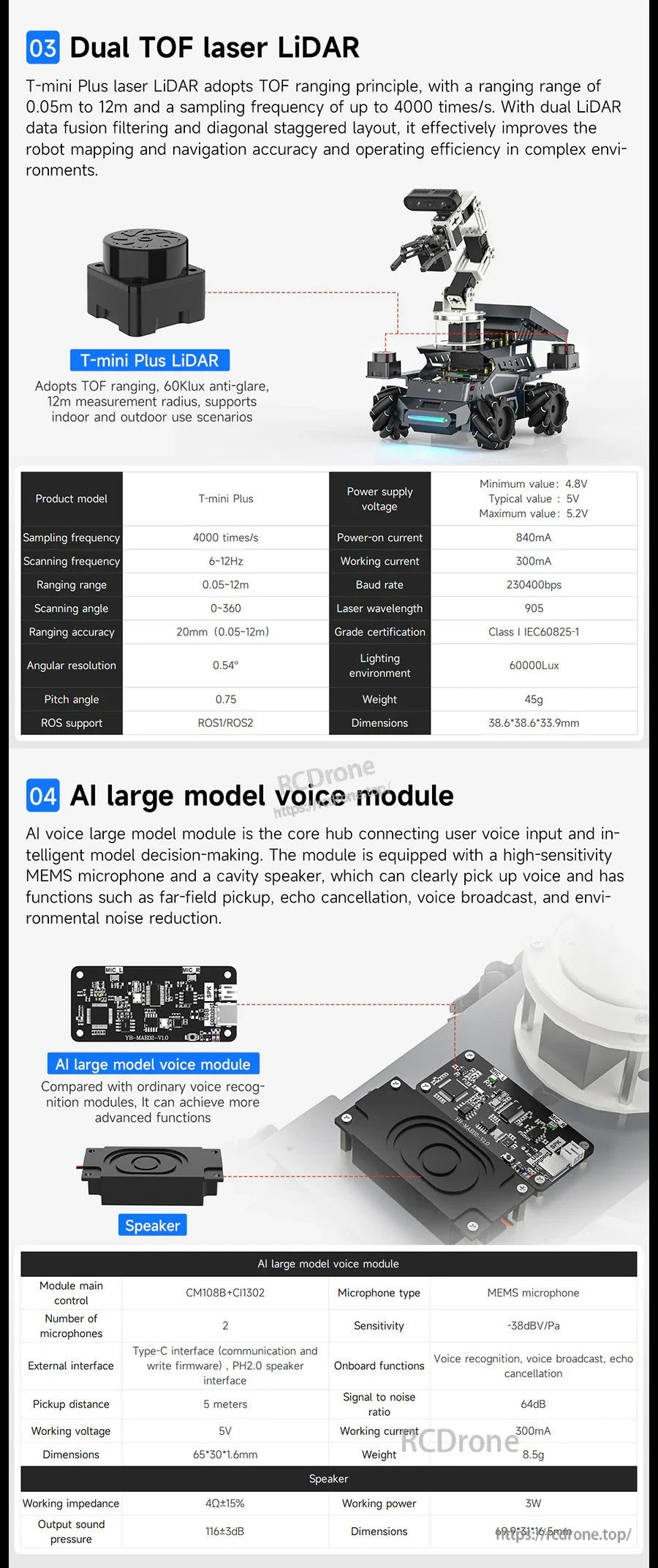
يدعم ليزر LiDAR TOF مدى يتراوح بين 0.05–12 متر مع ما يصل إلى 4000 مسح في الثانية، بينما يضيف وحدة الصوت اتصالات الميكروفون والسماعات للتفاعل الصوتي.
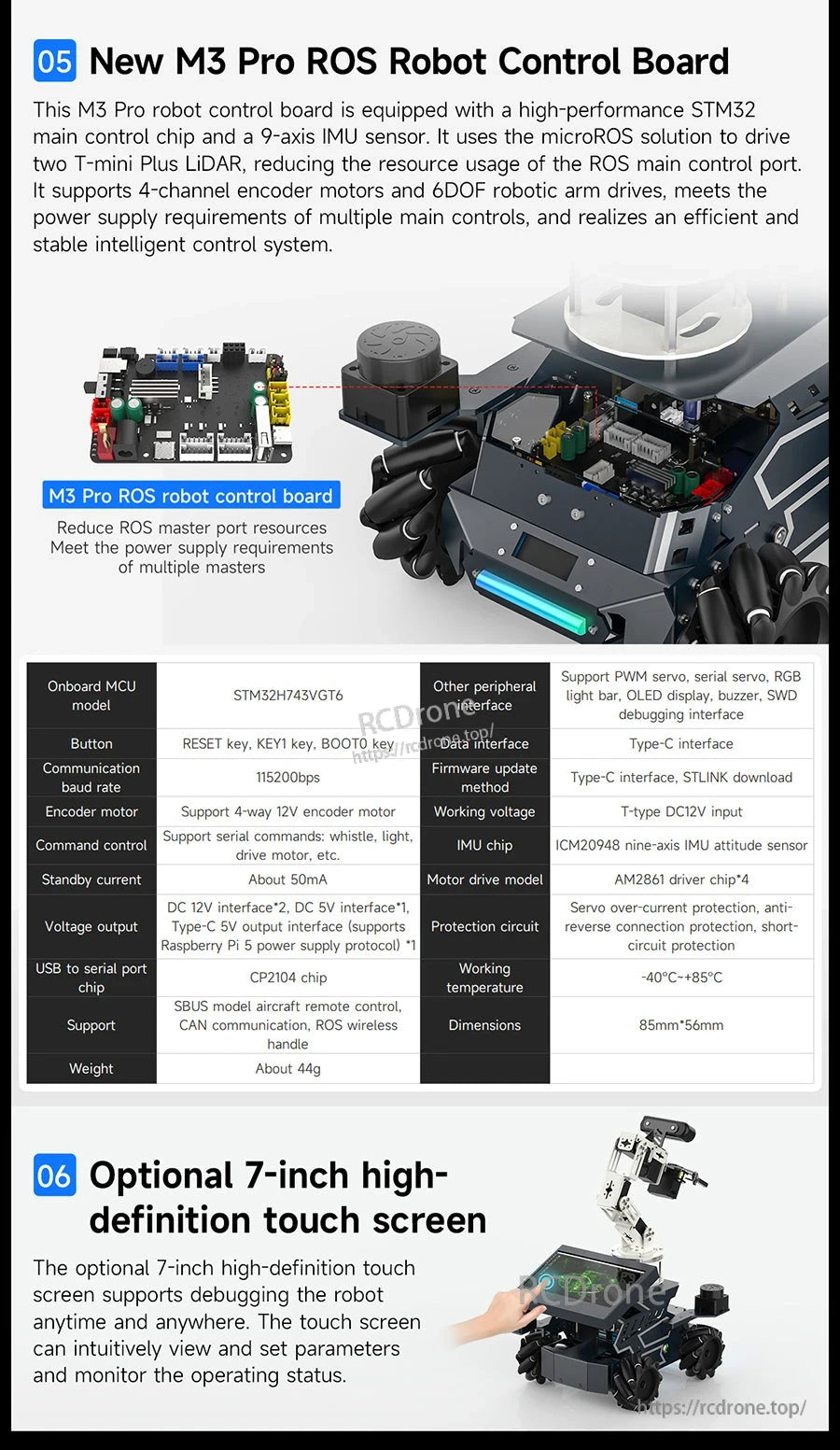
توفر لوحة التحكم في الروبوت Yahboom ROSMASTER M3 Pro ROS2 تخطيط موصل مضغوط ومسمى لبناء وتوسيع نظام الروبوت المتنقل.
يتضمن Yahboom ROSMASTER M3 Pro الوصول إلى أكثر من 200 دورة مفصلة عبر مستودع دروس عبر الإنترنت لتعلم ROS2 وAI.
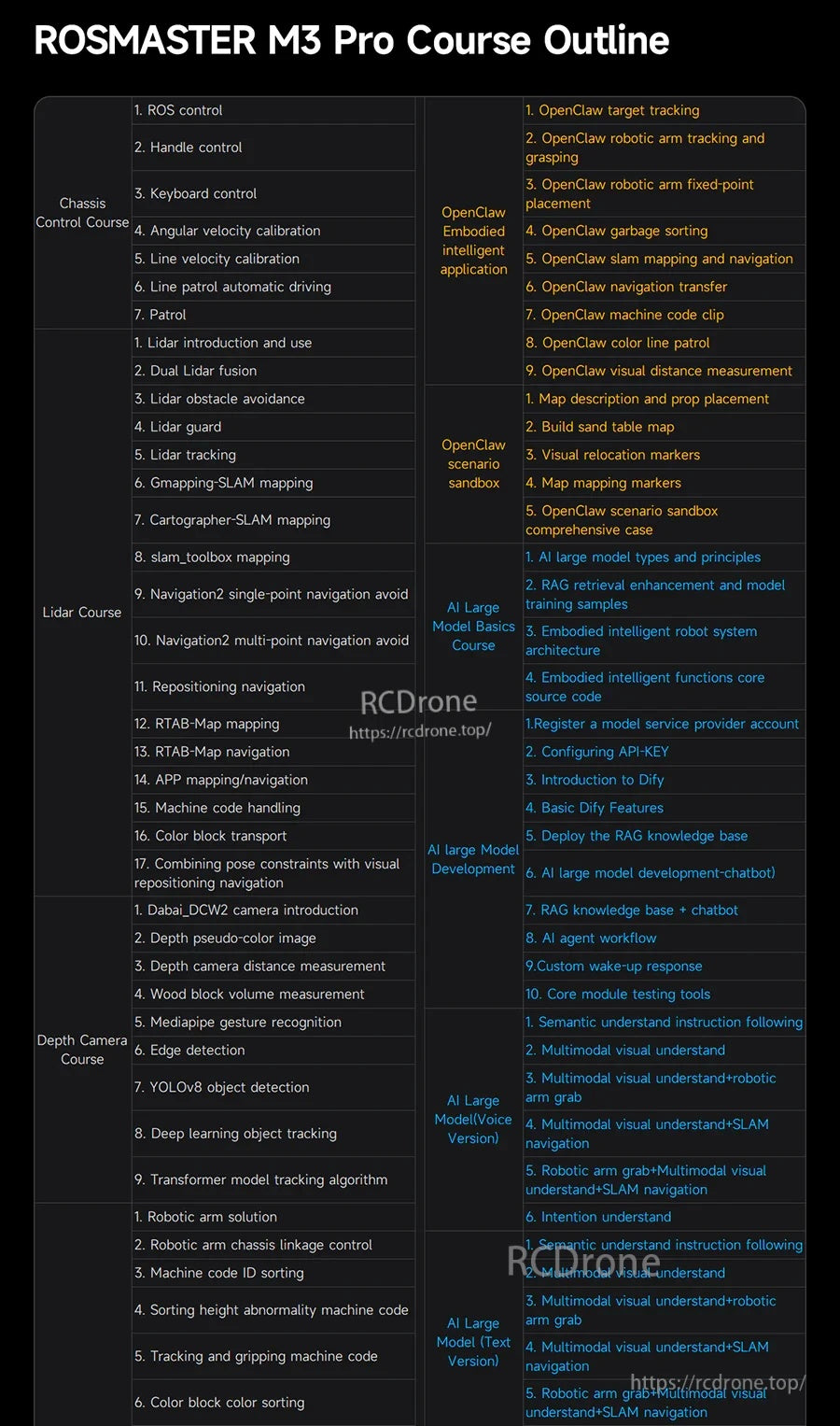
يتضمن مخطط التعلم لـ ROSMASTER M3 Pro أساسيات التحكم في ROS إلى جانب مهام الرؤية باستخدام OpenCV، ورسم الخرائط باستخدام SLAM، وميزات الذكاء الاصطناعي لممارسة متقدمة لـ ROS2.
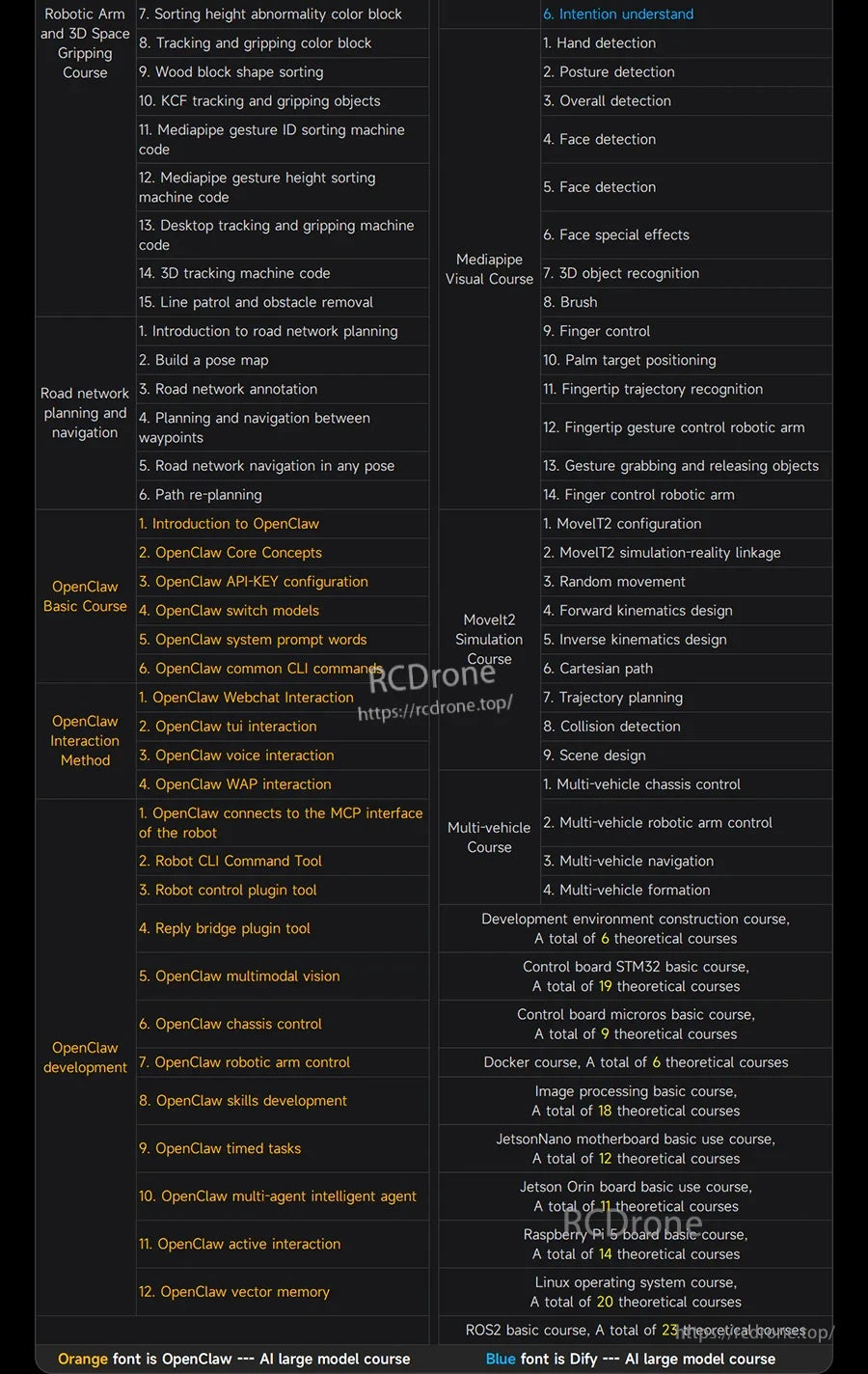
يغطي مخطط التعلم لـ ROSMASTER M3 Pro مواضيع مثل الرؤية باستخدام OpenCV، وتتبع MediaPipe، ومحاكاة MoveIt2، وأساسيات ROS2.
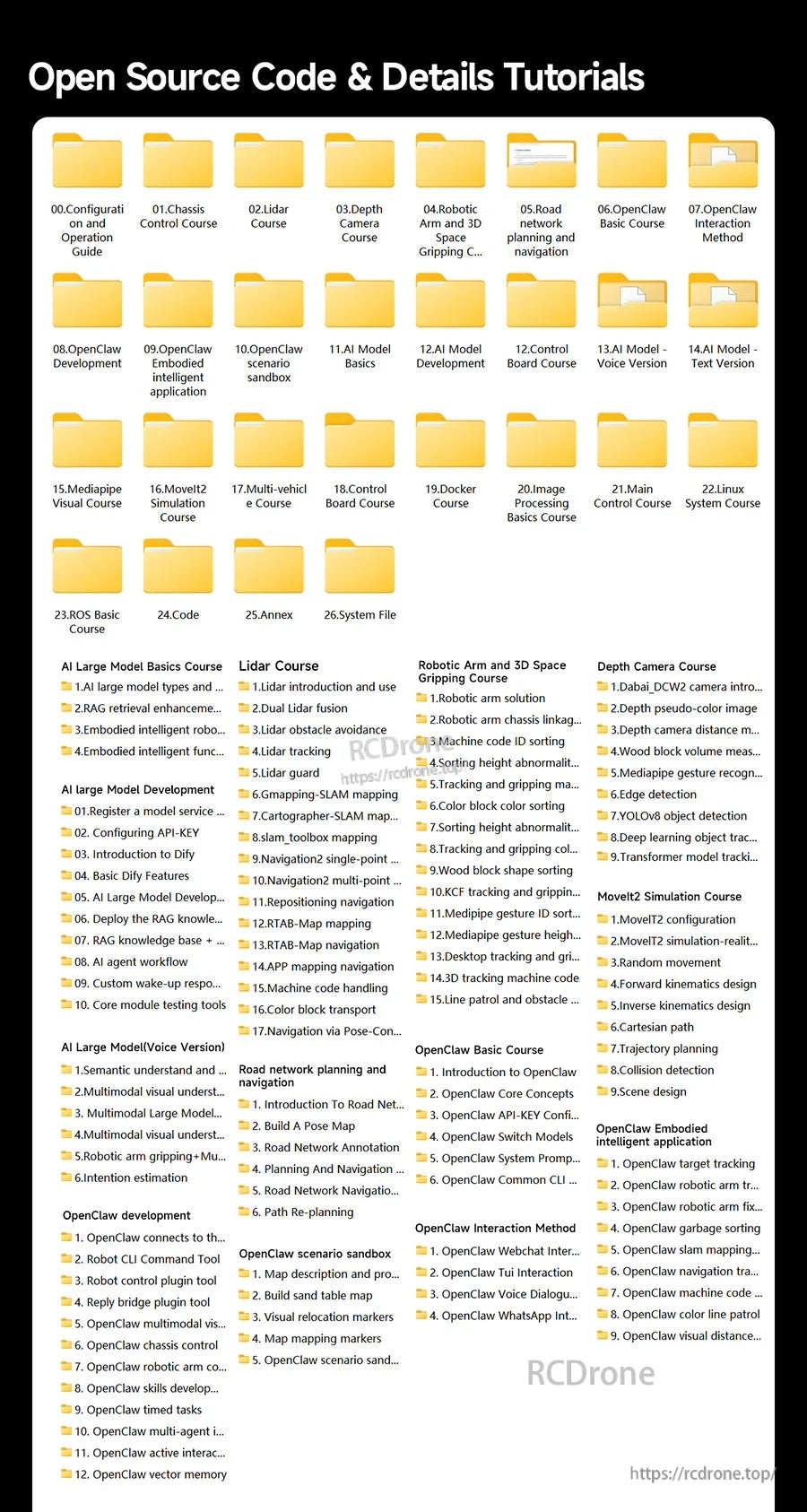
يتضمن ROSMASTER M3 Pro مجلدات كود مفتوح المصدر ودروسًا تعليمية مفصلة تغطي أساسيات ROS، ورسم الخرائط، والملاحة، ومهام الرؤية.
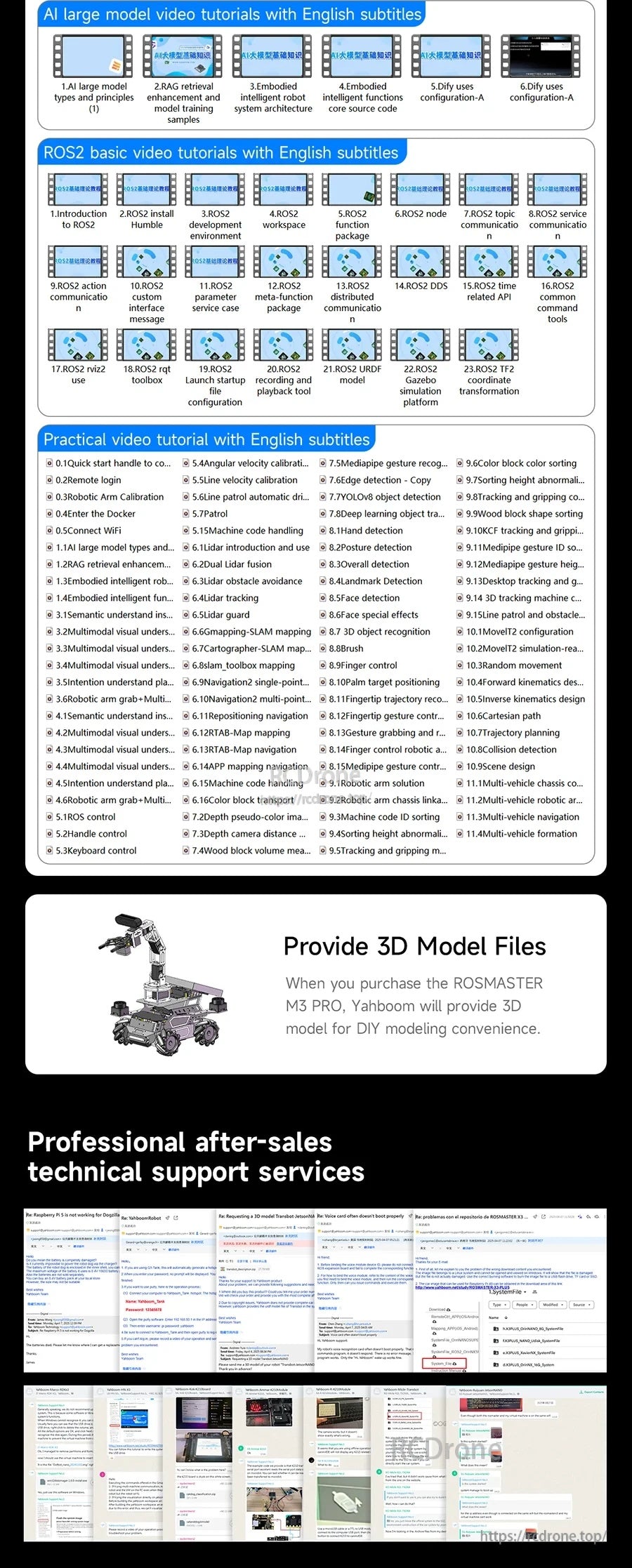
يأتي ROSMASTER M3 Pro مع دروس فيديو لـ ROS2 مع ترجمة إنجليزية ويوفر ملفات نماذج ثلاثية الأبعاد لدعم التطوير والتكامل.

يوضح مقارنة سلسلة ROSMASTER الفروقات الرئيسية في نوع الهيكل، وخيارات كاميرا RGBD، ولوحات التحكم، وسعة البطارية للمساعدة في اختيار منصة الروبوت ROS2 المناسبة.
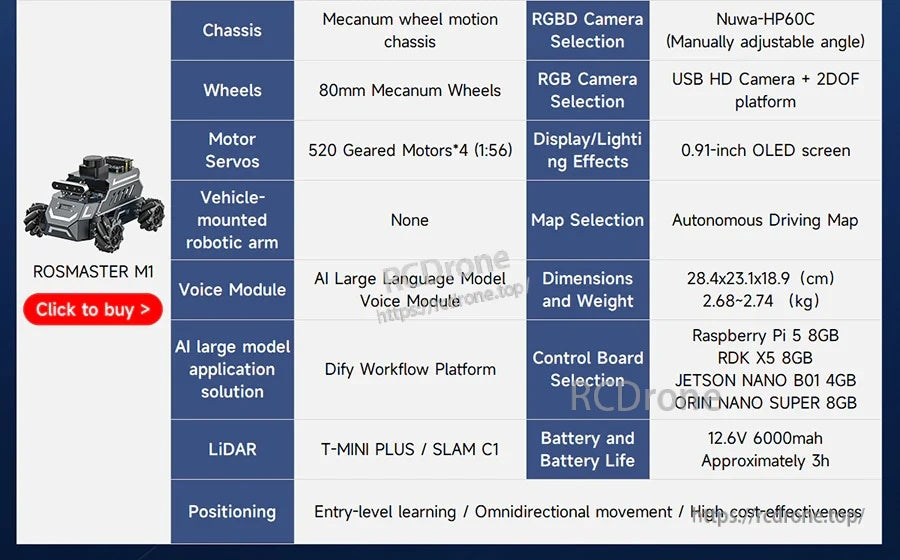
تجمع منصة ROSMASTER M1 بين هيكل بعجلات ميكانوم ومحركات 520 مسننة مع خيارات كاميرا، LiDAR، ولوحة تحكم قابلة للاختيار لتطوير قائم على ROS.
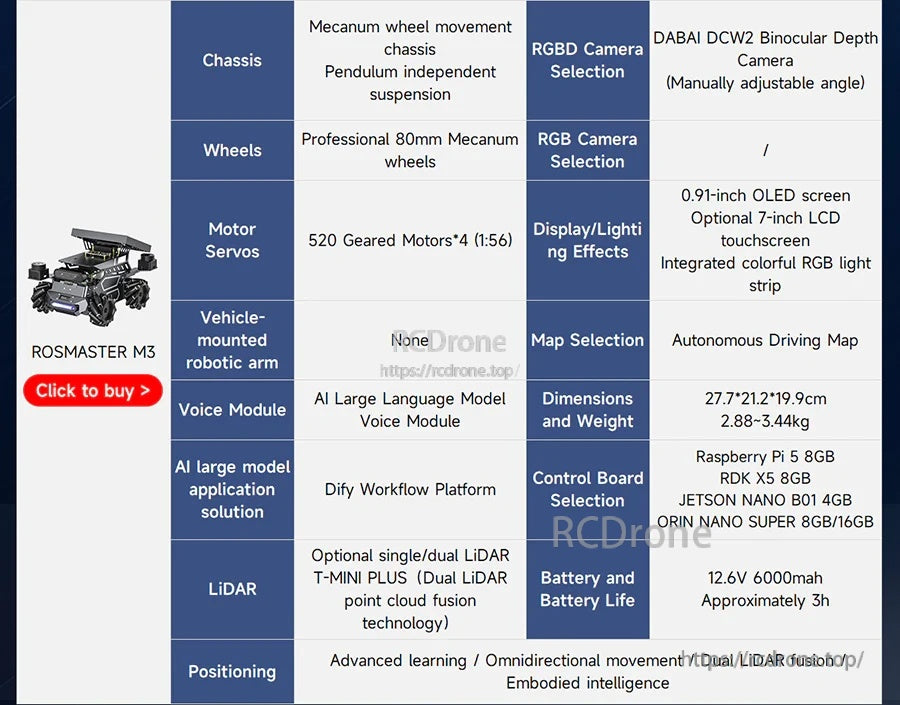
يقرن ROSMaster M3 Pro هيكل بعجلات ميكانوم مع خيارات كاميرا RGBD، شاشة OLED بحجم 0.91 بوصة/شاشة لمس اختيارية بحجم 7 بوصات، وبطارية 12.6V 6000mAh.
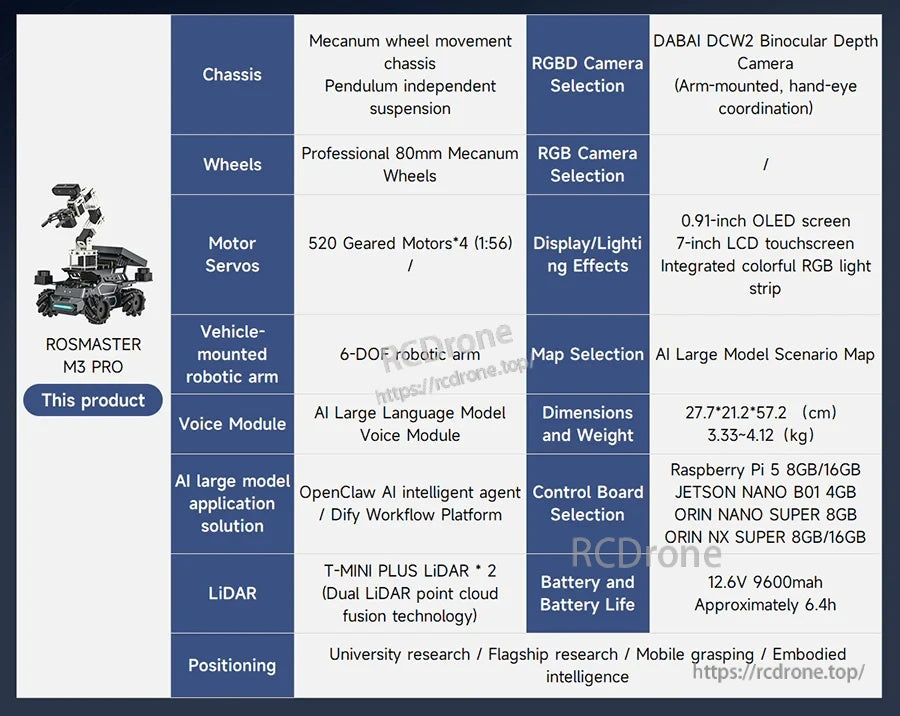
تسرد منصة ROSMASTER M3 Pro هيكل بعجلات ميكانوم، كاميرا RGBD اختيارية، ذراع روبوتية 6‑DOF، LiDAR مزدوج، وخيارات لوحة تحكم Raspberry Pi أو Jetson.
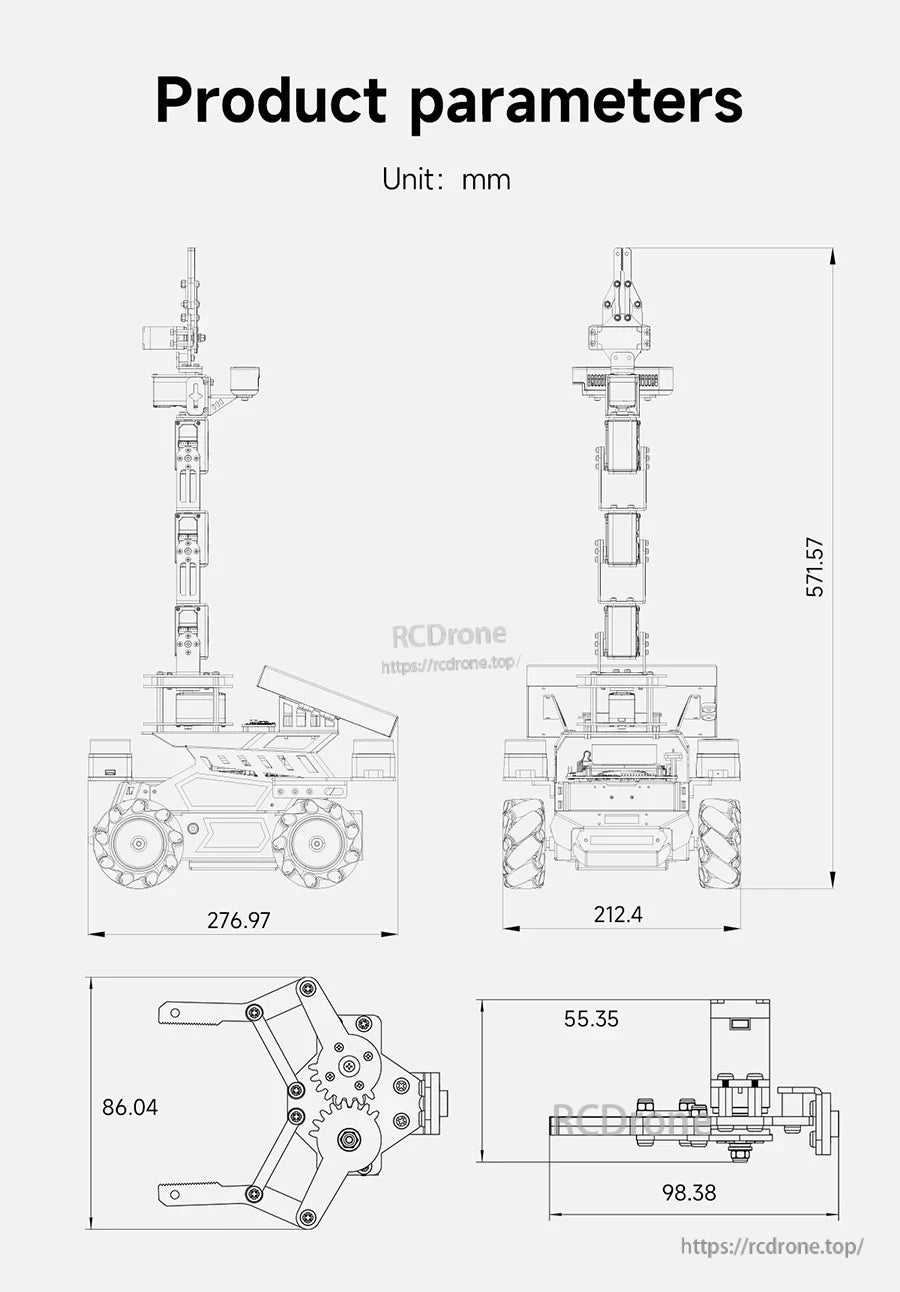
تسرد رسومات أبعاد روبوت Yahboom ROSMASTER M3 Pro ROS2 القياسات الرئيسية الإجمالية بالمليمترات لتخطيط التركيب والتثبيت.
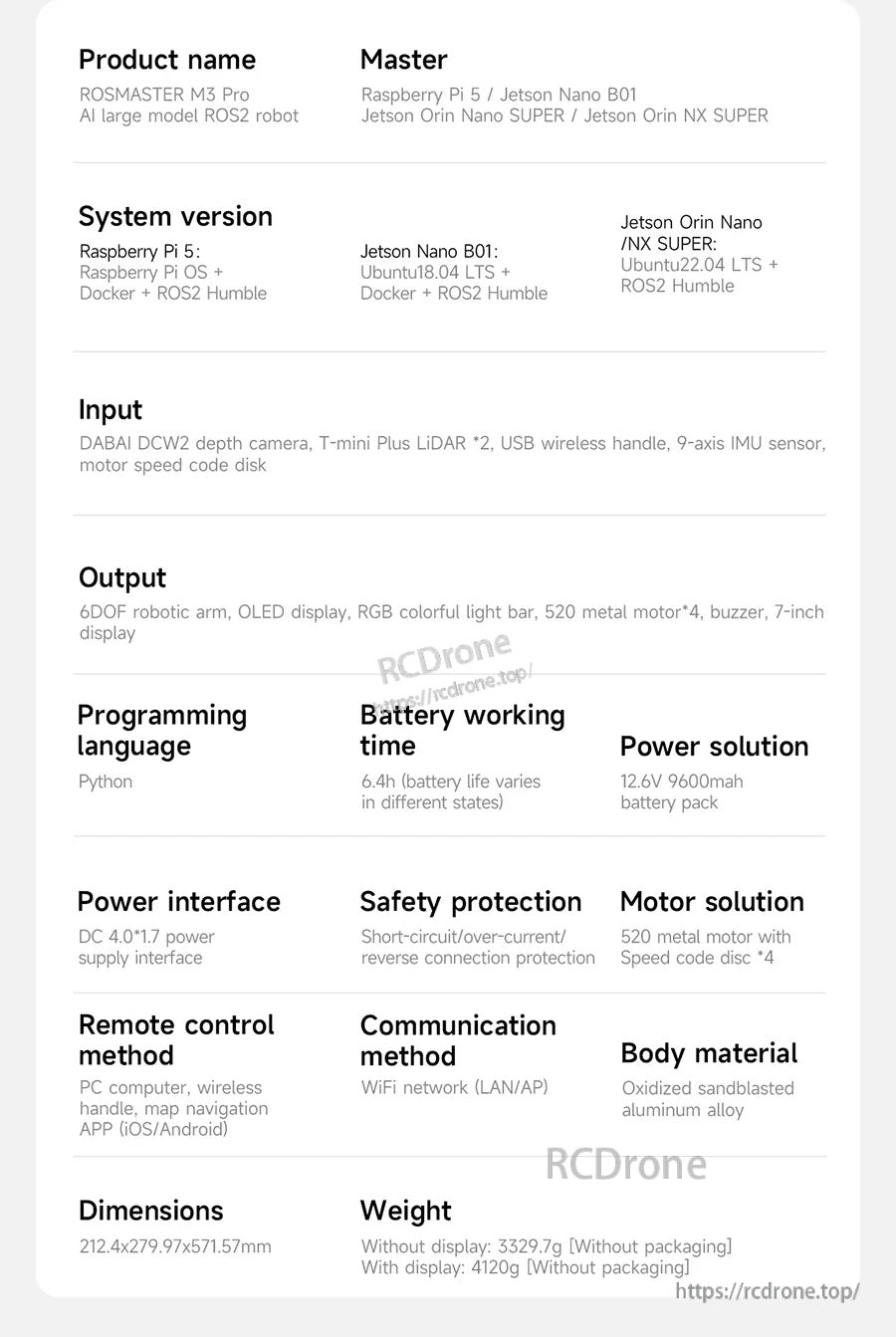
يدعم ROSMASTER M3 Pro منصات Raspberry Pi 5 أو Jetson Orin مع برمجة Python، شبكات WiFi، وحزمة بطارية 12.6V 9600mAh.

تتضمن مجموعة ROSMASTER M3 Pro هيكل الروبوت، ذراع 6DOF، وحدة التحكم، لوحات التوسعة، البطاريات، الحوامل، والأدوات الأساسية للتجميع.
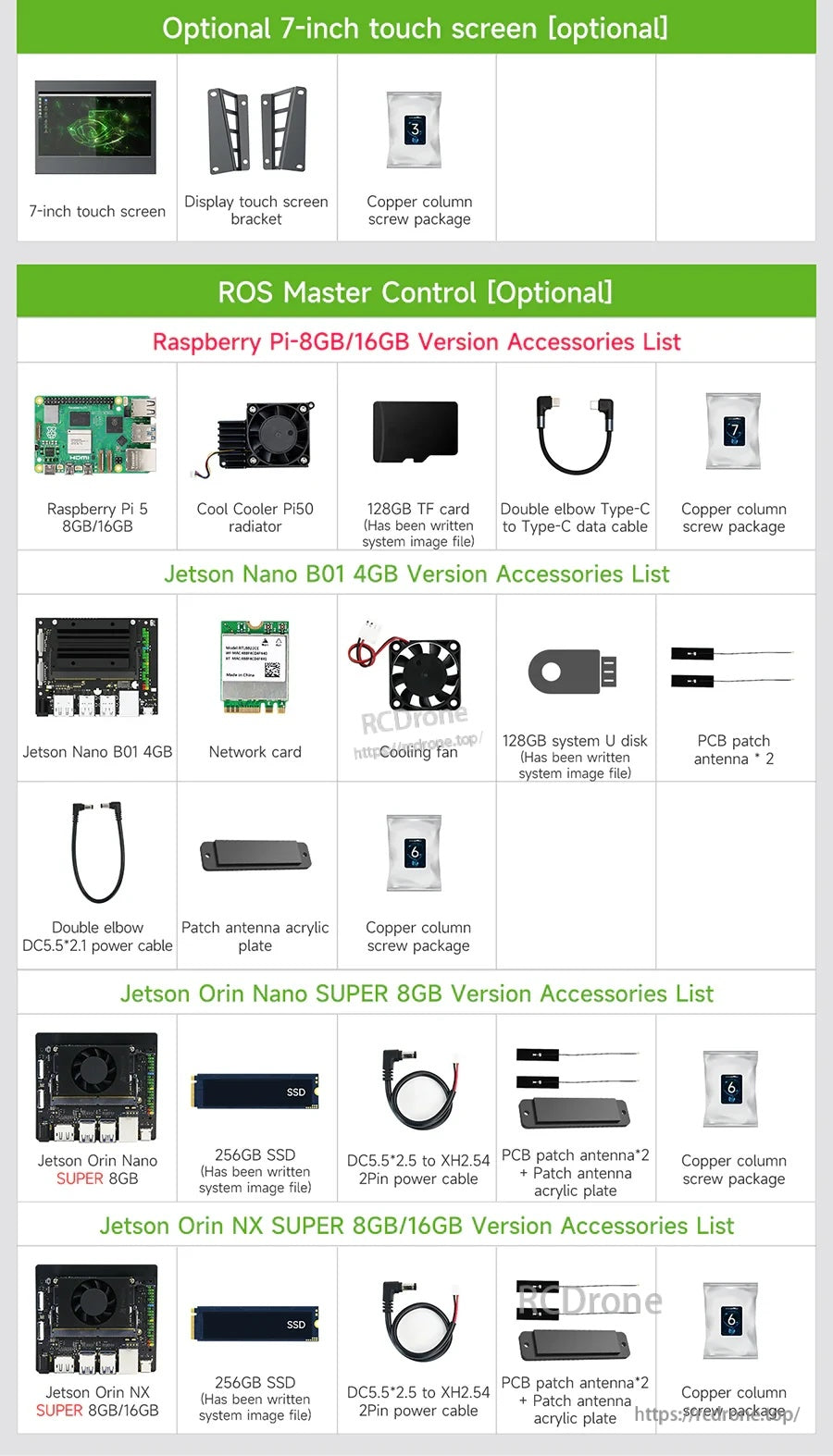
تُنظم حزم الملحقات الاختيارية حسب خيار وحدة التحكم، بما في ذلك مجموعة شاشة لمس 7 بوصات ومجموعات لألواح Raspberry Pi أو NVIDIA Jetson مع الكابلات والحوامل اللازمة.
Related Collections


























