








CQ230 অ্যাসেম্বলি ড্রোন ডেভেলপমেন্ট কিট - রাস্পবেরি পাই 4B Pixhawk Ardupilot ইন্ডাস্ট্রিয়াল ওপেন-সোর্স প্রোগ্রামেবল DIY ড্রোন কিট অ্যান্টি-কলিশন র্যাকের সাথে
CQ230 অ্যাসেম্বলি ড্রোন ডেভেলপমেন্ট কিট - রাস্পবেরি পাই 4B Pixhawk Ardupilot ইন্ডাস্ট্রিয়াল ওপেন-সোর্স প্রোগ্রামেবল DIY ড্রোন কিট অ্যান্টি-কলিশন র্যাকের সাথে
RCDrone
পিকআপের উপলভ্যতা লোড করা যায়নি
ওভারভিউ
CQ230 অ্যাসেম্বলি ড্রোন ডেভেলপমেন্ট কিট একটি কমপ্যাক্ট, ওপেন সোর্স DIY ড্রোন প্ল্যাটফর্ম দ্বারা চালিত রাস্পবেরি পাই 4B এবং পিক্সহক ফ্লাইট কন্ট্রোলার একটি 230 মিমি হুইলবেস, অ্যান্টি-কলিশন ফ্রেম এবং একটি 4S (16.8V) পাওয়ার সিস্টেমের বৈশিষ্ট্যযুক্ত, এই ড্রোনটি ওপেন-সোর্স প্রোগ্রামেবল বৈশিষ্ট্যগুলি শেখার এবং পরীক্ষা করার জন্য আদর্শ। প্ল্যাটফর্মটি ওয়েপয়েন্ট নেভিগেশন, ডেটা মনিটরিং এবং রিয়েল-টাইম ভিডিও স্ট্রিমিংয়ের মতো কাজের জন্য সম্পূর্ণরূপে সজ্জিত, এটি ডেভেলপার এবং নতুনদের জন্য একইভাবে একটি চমৎকার পছন্দ করে তুলেছে।
মূল বৈশিষ্ট্য
- কমপ্যাক্ট ডিজাইন: একটি 360mm x 360mm x 300mm আকারের, ড্রোনটি ছোট জায়গার জন্য আদর্শ৷
- বিরোধী সংঘর্ষ র্যাক: সম্পূর্ণ কার্বন ফাইবার বিরোধী সংঘর্ষ ফ্রেম স্থায়িত্ব এবং সুরক্ষা নিশ্চিত করে।
- রাস্পবেরি পাই 4B ইন্টিগ্রেশন: মসৃণ অপারেশন এবং বিকাশের জন্য উবুন্টু 20.04 এর সাথে উন্নত।
- ওপেন সোর্স ফ্রেমওয়ার্ক: দ্বারা চালিত আরদুপাইলট, Dronekit, MAVLink, এবং ROS সমর্থন করে।
- প্রোগ্রামেবল কাজ: স্বায়ত্তশাসিত নেভিগেশন, রিয়েল-টাইম ডেটা মনিটরিং এবং ভিজ্যুয়াল প্রক্রিয়াকরণে সক্ষম।
- ওয়েপয়েন্ট নেভিগেশন: GPS-ভিত্তিক নির্ভুলতার সাথে রুট সেট করুন।
- রিয়েল-টাইম ডেটা ট্রান্সমিশন: গ্রাউন্ড স্টেশনে ওয়াইফাই-সক্ষম ডেটা স্থানান্তর।
- ভিজ্যুয়াল নেভিগেশন: সুনির্দিষ্ট ইনডোর নেভিগেশন এবং বাধা এড়ানোর জন্য ডুয়াল-ক্যামেরা সিস্টেম।
- প্রোগ্রামেবল কন্ট্রোল: কাস্টম ফ্লাইট কমান্ড তৈরি করতে Dronekit-Python ব্যবহার করুন।
- সিস্টেম সিমুলেশন: কার্যকারিতার নির্বিঘ্ন পরীক্ষার জন্য SITL সিমুলেশন একত্রিত করুন।
স্পেসিফিকেশন
| প্যারামিটার | বিস্তারিত |
|---|---|
| মডেল | CQ230 |
| হুইলবেস | 230 মিমি |
| ব্যাটারি | 4S (16.8V) |
| ফ্লাইট সময় | 7 মিনিট |
| পেলোড ক্ষমতা | 200 গ্রাম |
| বায়ু প্রতিরোধের | লেভেল 3-4 |
| সর্বোচ্চ গতি | 20 কিমি/ঘন্টা |
| সর্বোচ্চ ফ্লাইট উচ্চতা | 120 মি |
| অবস্থান নির্ভুলতা | 2-3m (GPS) |
| ওজন | 612 গ্রাম |
| রিমোট কন্ট্রোল রেঞ্জ | 700 মি |
প্যাকেজ
মৌলিক সংস্করণ
- Pixhawk 2.4.8 ফ্লাইট কন্ট্রোলার ×1
- M8N GPS ×1
- লেডি মিনি পিক্স পাওয়ার মডিউল ×1
- CUAV ওয়াইফাই টেলিমেট্রি ×1
- 30A ESC ×4
- 5045 প্রপেলার ×4
- CQ230 ফ্রেম ×1
- A400 ব্যালেন্স চার্জার ×1
- 4S 2300mAh ব্যাটারি ×1
- 2205 মোটর ×4
- FS-i6 রিমোট কন্ট্রোলার ×1
- বিবি অ্যালার্ম বাজার ×1
- MF-01 অপটিক্যাল ফ্লো মডিউল ×1
ভিজ্যুয়াল সংস্করণ
- পিক্সহক 2.4।8 ফ্লাইট কোনিয়ন্ত্রক ×1
- M8N GPS ×1
- লেডি মিনি পিক্স পাওয়ার মডিউল ×1
- CS ক্যামেরা ×1
- 30A ESC ×4
- 5045 প্রপেলার ×4
- CQ230 ফ্রেম ×1
- বিবি অ্যালার্ম বাজার ×1
- MF-01 অপটিক্যাল ফ্লো মডিউল ×1
- A400 ব্যালেন্স চার্জার ×1
- 4S 2300mAh ব্যাটারি ×1
- 2205 মোটর ×4
- FS-i6 রিমোট কন্ট্রোলার ×1
- Raspi 4B-4G অনবোর্ড কম্পিউটার ×1 সেট
- T265 ভিজ্যুয়াল ক্যামেরা ×1
অ্যাপ্লিকেশন
- ডেলিভারি: দক্ষতার সাথে লাইটওয়েট আইটেম পরিবহন.
- শিক্ষাগত উন্নয়ন: ড্রোন সিস্টেম অন্বেষণ করার জন্য ছাত্র এবং গবেষকদের জন্য আদর্শ।
- ভিজ্যুয়াল প্রসেসিং: উন্নত ভিডিও স্ট্রিমিং এবং বিশ্লেষণের জন্য OpenCV ব্যবহার করুন।
- নেভিগেশন পরীক্ষা: স্বায়ত্তশাসিত GPS-ভিত্তিক ফ্লাইট এবং অবস্থান ট্র্যাকিং নিয়ে পরীক্ষা করুন৷
অতিরিক্ত নোট
- একটি উন্নত প্রোগ্রামিং ইন্টারফেসের জন্য সিস্টেমটিতে উবুন্টু 20.04 অন্তর্ভুক্ত রয়েছে।
- Ardupilot এর শক্তিশালী ইকোসিস্টেম ড্রোন অ্যাপ্লিকেশনে স্কেলেবিলিটি এবং বহুমুখিতা নিশ্চিত করে।
- নতুন এবং পেশাদারদের জন্য দেওয়া টিউটোরিয়াল সহ একটি সম্পূর্ণ লার্নিং কিট।
বিস্তারিত
CQ230 ওপেন-সোর্স ড্রোন সিস্টেম

পিক্সহক: ড্রোন হার্ডওয়্যার সিস্টেম
Pixhawk 2.4.8 কন্ট্রোলার ব্যবহার করে, নতুন স্ট্যান্ডার্ড 32-বিট প্রসেসর STM32F427 দিয়ে সজ্জিত এবং 5611 ব্যারোমিটারের সাথে যুক্ত। এটি সমৃদ্ধ ইন্টারফেস বিকল্প সহ একটি সাশ্রয়ী ওপেন সোর্স কন্ট্রোলার।

ArduPilot: ড্রোন সফটওয়্যার সিস্টেম
ড্রোনের সফ্টওয়্যার সিস্টেম - মূলত নিয়ন্ত্রণ ফার্মওয়্যার - ব্যাপকভাবে গৃহীত ওপেন সোর্স প্রকল্প ArduPilot ব্যবহার করে।
(ArduPilot একটি উন্নত, সম্পূর্ণ বৈশিষ্ট্যযুক্ত, এবং নির্ভরযোগ্য ওপেন সোর্স অটোপাইলট সফ্টওয়্যার সিস্টেম প্রদান করে।)
এটি সমস্ত কল্পনাযোগ্য ড্রোন সিস্টেমকে নিয়ন্ত্রণ করতে পারে। যারা প্রযুক্তি, ড্রোন এবং অন্বেষণ ভালবাসেন তাদের জন্য, ArduPilot বোঝা আপনাকে একটি আকর্ষণীয় এবং আকর্ষক বিশ্বের সাথে পরিচয় করিয়ে দেবে।

ArduPilot বিশ্বব্যাপী 1,000,000 ড্রোন সিস্টেমে ইনস্টল করা হয়েছে। উন্নত ডেটা লগিং, বিশ্লেষণ এবং সিমুলেশন টুল দিয়ে সজ্জিত, এটি একটি পুঙ্খানুপুঙ্খভাবে পরীক্ষিত এবং নির্ভরযোগ্য অটোপাইলট সিস্টেম। এটি NASA, Intel, Insitu, Boeing এবং বিশ্বের অসংখ্য প্রতিষ্ঠান এবং বিশ্ববিদ্যালয়গুলির মতো বড় প্রতিষ্ঠান এবং কোম্পানিগুলি পরীক্ষা ও উন্নয়নের জন্য ব্যবহার করে।

মিশন প্ল্যানার গ্রাউন্ড কন্ট্রোল স্টেশন
বৈশিষ্ট্য:
- ড্রোন টিউনিং এবং প্যারামিটার সেটআপ টুল;
- মানচিত্রে ফ্লাইট পাথ সেট করুন, ড্রোনগুলিকে স্বয়ংক্রিয়ভাবে পূর্বনির্ধারিত রুটগুলি অনুসরণ করতে সক্ষম করে;
- ড্রোন নিয়ন্ত্রণ করতে ড্রপডাউন মেনু থেকে মিশন কমান্ড নির্বাচন করুন;
- লগগুলি ডাউনলোড এবং বিশ্লেষণ করুন;
- SITL (Software In The Loop) সিস্টেম ব্যবহার করে সিমুলেশন সম্পাদন করুন;
- আরও বৈশিষ্ট্য আপনার আবিষ্কারের জন্য অপেক্ষা করছে, এবং সম্ভাবনা এখানেই শেষ নয়...


| পূর্বনির্ধারিত বৈশিষ্ট্য | মৌলিক সংস্করণ | ভিজ্যুয়াল সংস্করণ |
|---|
| লাইন অঙ্কন | ✓ | ✓ |
| উচ্চতা হোল্ড, হোভার, স্থিতিশীলতা | ✓ | ✓ |
| বাড়ি ফেরা, ব্যর্থ-নিরাপদ প্রত্যাবর্তন | ✓ | ✓ |
| ল্যান্ডিং, কম ব্যাটারি ল্যান্ডিং | ✓ | ✓ |
| আউটডোর জিপিএস পজিশনিং এবং রুট ফ্লাইট | ✓ | ✓ |
| ড্রোনকিট-পাইথন প্রোগ্রামেবল কন্ট্রোল | ✓ | ✓ |
| রিয়েল-টাইম ডেটা ট্রান্সমিশনের জন্য ওয়াইফাই টেলিমেট্রি (প্রায় 5 মি পরিসর) | ✗ | ✓ |
| ইনডোর অপটিক্যাল ফ্লো পজিশনিং, লেজার উচ্চতা ফিক্সিং | ✓ | ✓ |
| ইনডোর ডুয়াল ভিজ্যুয়াল পজিশনিং নেভিগেশন, এমপি অ্যাঙ্কর পয়েন্ট, রুট ফ্লাইট, QR কোড স্বীকৃতি সহ সুনির্দিষ্ট ল্যান্ডিং | ✗ | ✓ |
ইনডোর ফ্লাইং জন্য উপযুক্ত
360mm × 360mm × 300mm মাত্রা সহ কমপ্যাক্ট ডিজাইন, ছোট-স্পেস অপারেশনের জন্য আদর্শ৷

কার্বন ফাইবার ফ্রেম, শক্তিশালী এবং পতন প্রতিরোধী

বিরোধী সংঘর্ষ রিং নকশা কার্যকরভাবে ফ্লাইট নিরাপত্তা নিশ্চিত করতে মোটর এবং প্রপেলার ব্লেড রক্ষা করে;

মাল্টি-সিনারিও ফাংশনাল ডেভেলপমেন্টের জন্য বর্ধিত প্রসারণযোগ্যতা
মৌলিক মডেলের উপর ভিত্তি করে, সিস্টেমটি রাস্পবেরি পাই 4B যোগ করে এবং রাস্পবেরি পাই সিস্টেমকে একীভূত করেছে। এই সিস্টেম অন্তর্ভুক্ত:
- উবুন্টু 20.04 (গ্রাফিক্যাল ইন্টারফেসের সাথে ওপেন সোর্স অপারেটিং সিস্টেম)
- ড্রোনকিট-পাইথন (ড্রোনকিট ব্যবহার করে প্রোগ্রামিং ড্রোন নিয়ন্ত্রণের জন্য একটি পাইথন লাইব্রেরি)
- Pymavlink (MAVLink প্রোটোকলের একটি পাইথন বাস্তবায়ন, Pymavlink ব্যবহার করে প্রোগ্রামেবল ড্রোন নিয়ন্ত্রণ সক্ষম করে)
- ROS (রোবট অপারেটিং সিস্টেম)
- মাভরোস (ROS এর মাধ্যমে ড্রোন নিয়ন্ত্রণের জন্য একটি যোগাযোগ প্রোটোকল)
- Gstreamer (কম লেটেন্সি ভিডিও স্ট্রিমিং ট্রান্সমিশন)
- Mavlink-রাউটার (বিভিন্ন শেষ পয়েন্টে ফ্লাইট কন্ট্রোলার MAVLink ডেটা বিতরণ করে)
- OpenCV (কম্পিউটার ভিশন প্রক্রিয়াকরণের জন্য ওপেন সোর্স সফ্টওয়্যার লাইব্রেরি)

উপরের সিস্টেমের উপর ভিত্তি করে, ড্রোনটি অর্জন করতে পারে:
- ড্রোনকিট-পাইথন ব্যবহার করে প্রোগ্রামেবল ড্রোন নিয়ন্ত্রণ
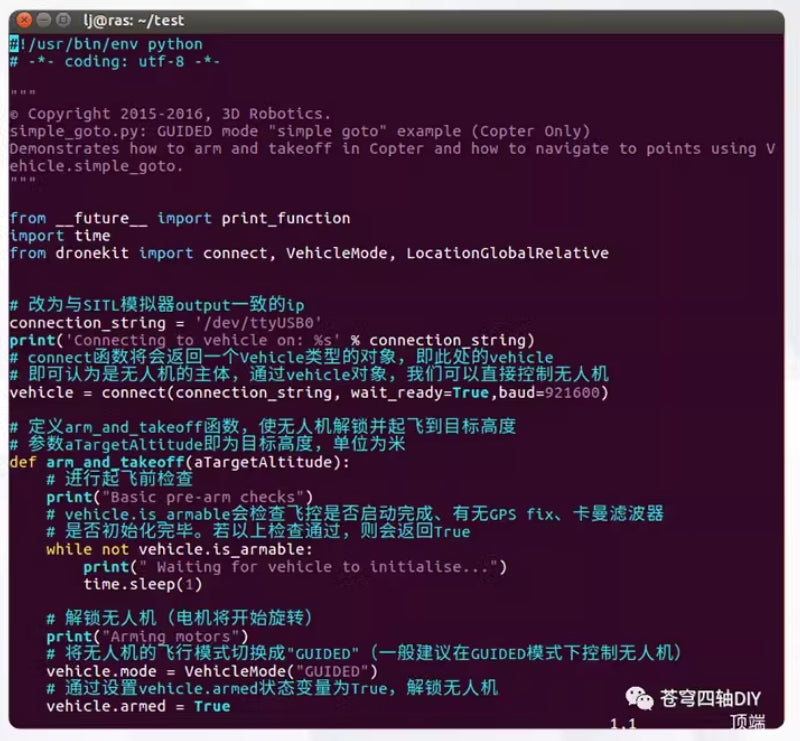
2. CV ভিজ্যুয়াল প্রসেসিং খুলুন
একটি CSI ক্যামেরা যোগ করা হয়েছে, ইমেজ ট্রান্সমিশন এবং পোস্ট-প্রসেসিং সক্ষম করে:
- ভিজ্যুয়াল স্ট্রীম রাস্পবেরি পাই ব্যবহার করে ক্যাপচার করা যায় এবং OpenCV এর মতো টুল দিয়ে প্রক্রিয়া করা যায়।
- রিয়েল-টাইম এইচডি ভিডিও স্ট্রিমগুলি প্রক্রিয়াকরণের জন্য পিসিতে ফেরত পাঠানো যেতে পারে বা পর্যালোচনার জন্য একটি মোবাইল ডিভাইসে পাঠানো যেতে পারে।

3. রিয়েল-টাইম এইচডি ভিডিও ট্রান্সমিশন
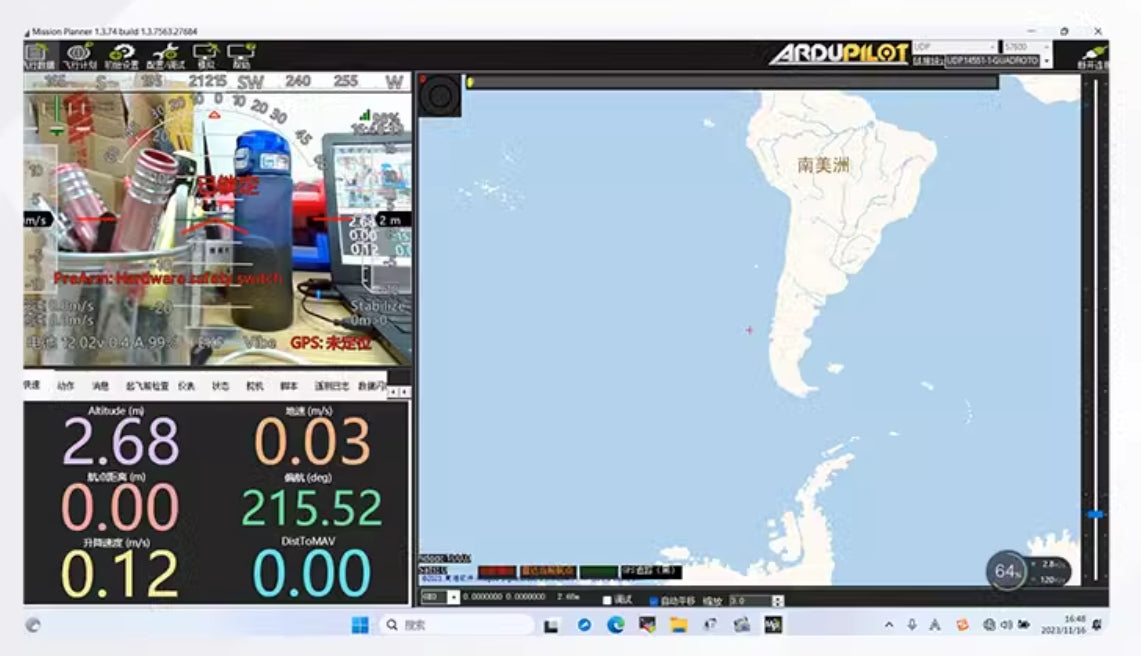
4.গ্রাউন্ড স্টেশন ডেটা মনিটরিং
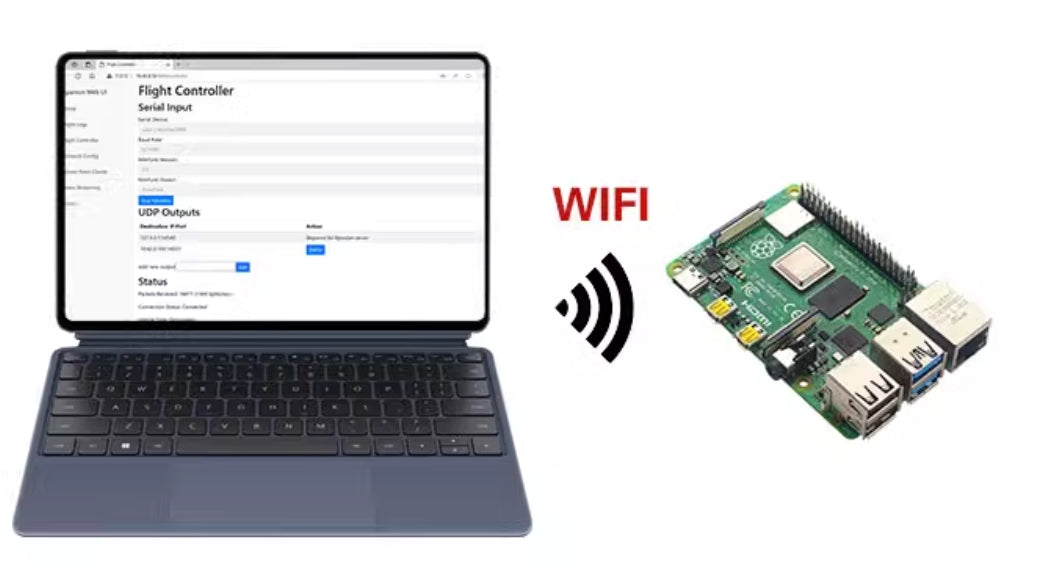
ওয়াইফাই নেটওয়ার্ক এবং পিসি গ্রাউন্ড স্টেশন (এমপি) এর মধ্যে যোগাযোগ এবং ইমেজ ট্রান্সমিশন অতিরিক্ত ট্রান্সমিশন মডিউলের প্রয়োজন ছাড়াই অর্জন করা যেতে পারে। পিসি 4B এর ওয়াইফাই হটস্পটের সাথে সংযুক্ত হওয়ার পরে, অ্যাক্সেসের মাধ্যমে ডেটা এবং চিত্র সংক্রমণ শুরু করা যেতে পারে 10.42.0.10:3000 একটি ওয়েব ব্রাউজারের মাধ্যমে।
5. উপরের ওপেন-সোর্স সিস্টেমের উপর ভিত্তি করে অতিরিক্ত বৈশিষ্ট্য এবং অ্যালগরিদম যাচাইকরণের বিকাশ
ভিজ্যুয়াল সংস্করণ সমর্থনকারী টিউটোরিয়াল:
মৌলিক সংস্করণ টিউটোরিয়াল ছাড়াও, রাস্পবেরি পাই ভিজ্যুয়াল প্রক্রিয়াকরণের জন্য পরিচিতিমূলক টিউটোরিয়ালগুলিও প্রদান করা হয়েছে।
Related Collections









