-
CUAV V5+ Trägerplatine Autopilot Pixhawk Flight Controller – FPV RC Drohne Quadcopter Hubschrauber VTOL
Normaler Preis $192.64 USDNormaler PreisGrundpreis pro -
CUAV NEUER V5+ Autopilot-Flugcontroller – basierend auf FMU V5 Open-Source-Hardware für FPV RC Drone Quadcopter Helicopter Pixhawk
Normaler Preis Von $554.59 USDNormaler PreisGrundpreis pro -
CUAV V5+/X7+ Träger-Basisplatine Flugcontroller, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Normaler Preis Von $208.60 USDNormaler PreisGrundpreis pro -
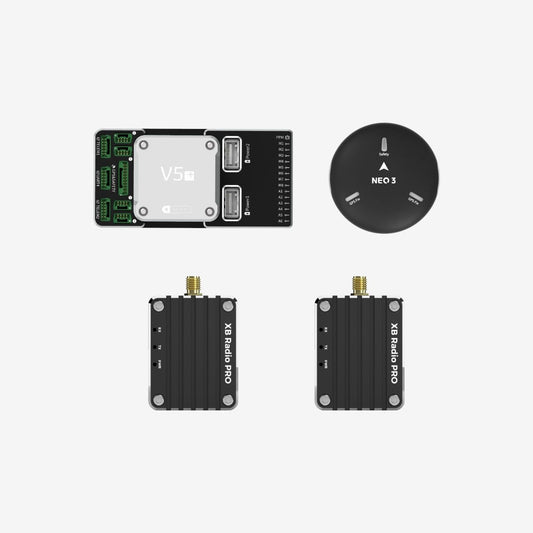
CUAV New Match Multi-Rotor-Copter-Paket – V5+ Autopilot Flight Controller NEO 3 GPS und XBEE Pro Telemetrie-Set
Normaler Preis $1,066.02 USDNormaler PreisGrundpreis pro -
CUAV P9 Funkdaten und Pixhawk Drone Fpv V5+ Flight Controller NEO 3 Pro GPS Telemetrie Combo
Normaler Preis $1,645.35 USDNormaler PreisGrundpreis pro -
CUAV Neues One-to-Multiple-Star-Paket mit V5+ Flight Flightcase RTK 9Ps GPS und P900 Radio Telemetry Combo Kit
Normaler Preis $5,056.40 USDNormaler PreisGrundpreis pro -
CUAV Neues One-to-Multiple mit V5+ Flight Controller RTK 9Ps GPS P9 Radio Telemetrie GNSS Kit Set
Normaler Preis $3,832.45 USDNormaler PreisGrundpreis pro -
CUAV Pixhawk Drone Fpv V5+ Flight Controller NEO 3 Pro GPS und Airspeed Tube SKYE Modul Combo
Normaler Preis $1,105.22 USDNormaler PreisGrundpreis pro -
CUAV NEUER Pixhack Pixhawk V5+ Autopilot – FPV RC Drone Quadcopter Helicopter Flight Controller und NEO V2 3 Pro GPS Combo
Normaler Preis Von $616.54 USDNormaler PreisGrundpreis pro -
CUAV VTOL Rc Drone Pixhawk Autopilot V5+ Core Carrier Board Paket mit NEO 3 GPS und P9 Telemetrie Combo
Normaler Preis $1,869.14 USDNormaler PreisGrundpreis pro -
CUAV Pixhawk Drone Fpv V5+ Flight Controller NEO 3 Pro GPS und CAN Power PMU Modul Combo
Normaler Preis $1,057.20 USDNormaler PreisGrundpreis pro -
CUAV CAN PDB Autopilot Carrier Board V5+ Plus Core – RC Drone Pixhawk Flight Controller
Normaler Preis $826.81 USDNormaler PreisGrundpreis pro -
CUAV NEUE Drohne UAV FPV V5+ Autopilot Pixhawk Flight Controller mit TF Luna Radar Lidar Modul
Normaler Preis $657.82 USDNormaler PreisGrundpreis pro -
CUAV NEU V5+ Hardware-Design Pixhack Pixhawk Autopilot Flugfernsteuerung FPV RC Drohne Quadcopter Hubschrauber Transport
Normaler Preis $408.00 USDNormaler PreisGrundpreis pro