








CQ230 Assembly Drone Development Kit – Raspberry Pi 4B Pixhawk Ardupilot Industrielles Open-Source-programmierbares DIY-Drohnen-Kit mit Antikollisions-Rack
CQ230 Assembly Drone Development Kit – Raspberry Pi 4B Pixhawk Ardupilot Industrielles Open-Source-programmierbares DIY-Drohnen-Kit mit Antikollisions-Rack
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Das CQ230 Assembly Drone Development Kit ist ein kompaktes Open-Source DIY-Drohne Plattform betrieben durch die Himbeer-Pi 4B Und Pixhawk Flugsteuerung. Mit einem 230-mm-Radstand, einem Antikollisionsrahmen und einem 4S-Stromversorgungssystem (16,8 V) ist diese Drohne ideal zum Lernen und Experimentieren mit programmierbaren Open-Source-Funktionen. Die Plattform ist voll ausgestattet für Aufgaben wie Wegpunktnavigation, Datenüberwachung und Echtzeit-Videostreaming und ist damit eine ausgezeichnete Wahl für Entwickler und Anfänger gleichermaßen.
Hauptmerkmale
- Kompaktes Design: Mit einer Größe von 360 mm x 360 mm x 300 mm ist die Drohne ideal für kleine Räume.
- Antikollisionsgestell: Der Antikollisionsrahmen aus Vollcarbon gewährleistet Haltbarkeit und Schutz.
- Raspberry Pi 4B Integration: Verbessert mit Ubuntu 20.04 für reibungslosen Betrieb und Entwicklung.
- Open-Source-Framework: Angetrieben von Ardupilot, unterstützt Dronekit, MAVLink und ROS.
- Programmierbar Aufgaben: Ermöglicht autonome Navigation, Echtzeit-Datenüberwachung und visuelle Verarbeitung.
- Wegpunktnavigation: Legen Sie Routen mit GPS-basierter Genauigkeit fest.
- Echtzeit-Datenübertragung: WiFi-gestützte Datenübertragung zu Bodenstationen.
- Visuelle Navigation: Doppelkamerasysteme für präzise Navigation im Innenbereich und Hindernisvermeidung.
- Programmierbare Steuerungen: Nutzen Sie Dronekit-Python, um benutzerdefinierte Flugbefehle zu erstellen.
- Systemsimulation: Kombinieren Sie SITL-Simulationen für nahtlose Funktionstests.
Technische Daten
| Parameter | Details |
|---|---|
| Modell | CQ230 |
| Radstand | 230 mm |
| Batterie | 4S (16,8 V) |
| Flugdauer | 7 Minuten |
| Nutzlastkapazität | 200g |
| Windbeständigkeit | Stufe 3-4 |
| Maximalgeschwindigkeit | 20 km/h |
| Maximale Flughöhe | 120 m |
| Positionierungsgenauigkeit | 2-3 m (GPS) |
| Gewicht | 612 g |
| Reichweite der Fernbedienung | 700 m |
Paket
Basisversion
- Pixhawk 2.4.8 Flugsteuerung ×1
- M8N GPS ×1
- Ledi MINI PIX Leistungsmodul ×1
- CUAV WiFi-Telemetrie ×1
- 30A Regler ×4
- 5045 Propeller ×4
- CQ230 Rahmen ×1
- A400 Balance-Ladegerät ×1
- 4S 2300mAh Akku ×1
- 2205 Motor ×4
- FS-i6 Fernbedienung ×1
- BB-Alarmsummer ×1
- MF-01 Optisches Flussmodul ×1
Visuelle Version
- Pixhawk 2.4.8 Flug Controller ×1
- M8N GPS ×1
- Ledi MINI PIX Leistungsmodul ×1
- CS-Kamera ×1
- 30A Regler ×4
- 5045 Propeller ×4
- CQ230 Rahmen ×1
- BB-Alarmsummer ×1
- MF-01 Optisches Flussmodul ×1
- A400 Balance-Ladegerät ×1
- 4S 2300mAh Akku ×1
- 2205 Motor ×4
- FS-i6 Fernbedienung ×1
- Raspi 4B-4G Bordcomputer × 1 Satz
- T265 Visuelle Kamera ×1
Anwendungen
- Lieferung: Leichte Gegenstände effizient transportieren.
- Bildungsentwicklung: Ideal für Studenten und Forscher, um Drohnensysteme zu erkunden.
- Visuelle Verarbeitung: Verwenden Sie OpenCV für erweitertes Video-Streaming und -Analyse.
- Navigationsexperimente: Experiment mit autonomem GPS-basiertem Flug und Positionsverfolgung.
Weitere Hinweise
- Das System enthält Ubuntu 20.04 für eine erweiterte Programmierschnittstelle.
- Das robuste Ökosystem von Ardupilot gewährleistet Skalierbarkeit und Vielseitigkeit bei Drohnenanwendungen.
- Ein komplettes Lernkit mit Tutorials für Anfänger und Profis.
Details
CQ230 Open-Source-Drohnensystem

Pixhawk: Drohnen-Hardwaresystem
Verwendet den Pixhawk 2.4.8-Controller, ausgestattet mit dem neuen Standard-32-Bit-Prozessor STM32F427 und gepaart mit dem 5611-Barometer. Es ist ein kostengünstiger Open-Source-Controller mit umfangreichen Schnittstellenoptionen.

ArduPilot: Drohnen-Softwaresystem
Das Softwaresystem der Drohne – im Wesentlichen die Steuerungs-Firmware – verwendet das weit verbreitete Open-Source-Projekt ArduPilot.
(ArduPilot bietet ein fortschrittliches, voll funktionsfähiges und zuverlässiges Open-Source-Autopilot-Softwaresystem.)
Es kann alle erdenklichen Drohnensysteme steuern. Für alle, die Technologie, Drohnen und Entdeckungen lieben, ist ArduPilot ein Einstieg in eine faszinierende und spannende Welt.

ArduPilot wurde weltweit in über 1.000.000 Drohnensystemen installiert. Ausgestattet mit fortschrittlichen Datenprotokollierungs-, Analyse- und Simulationstools ist es ein gründlich getestetes und zuverlässiges Autopilotsystem. Es wird auch von großen Organisationen und Unternehmen wie NASA, Intel, Insitu, Boeing und zahlreichen Instituten und Universitäten auf der ganzen Welt für Tests und Entwicklung verwendet.

Bodenkontrollstation des Missionsplaners
Merkmale:
- Tools zur Drohnen-Tuning und Parameter-Einrichtung;
- Legen Sie Flugrouten auf Karten fest, sodass Drohnen automatisch voreingestellten Routen folgen können.
- Wählen Sie Missionsbefehle aus Dropdown-Menüs aus, um die Drohne zu steuern.
- Protokolle herunterladen und analysieren;
- Führen Sie Simulationen mit dem SITL-System (Software In The Loop) durch.
- Weitere Funktionen warten darauf, von Ihnen entdeckt zu werden, und die Möglichkeiten enden hier nicht …


| Vordefinierte Funktionen | Basisversion | Visuelle Version |
|---|
| Strichzeichnung | ✓ | ✓ |
| Höhenhaltung, Schweben, Stabilisierung | ✓ | ✓ |
| Rückkehr nach Hause, ausfallsichere Rückkehr | ✓ | ✓ |
| Landung, Landung bei schwacher Batterie | ✓ | ✓ |
| Outdoor GPS-Positionierung und Routenflug | ✓ | ✓ |
| Dronekit-Python Programmierbare Steuerung | ✓ | ✓ |
| WiFi-Telemetrie zur Echtzeit-Datenübertragung (Reichweite ca. 5 m) | ✗ | ✓ |
| Optische Flusspositionierung im Innenbereich, Höhenbestimmung per Laser | ✓ | ✓ |
| Duale visuelle Positionierungsnavigation für den Innenbereich, MP-Ankerpunkte, Routenflug, präzise Landung mit QR-Code-Erkennung | ✗ | ✓ |
Geeignet für Indoor-Fliegen
Kompaktes Design mit Abmessungen von 360 mm × 360 mm × 300 mm, ideal für den Einsatz auf kleinem Raum.

Rahmen aus Kohlefaser, robust und sturzsicher

Das Design des Antikollisionsrings schützt den Motor und die Propellerblätter wirksam, um die Flugsicherheit zu gewährleisten.

Verbesserte Erweiterbarkeit für die funktionale Entwicklung mehrerer Szenarien
Basierend auf dem Basismodell fügt das System Raspberry Pi 4B hinzu und hat das Raspberry Pi-System integriert. Dieses System umfasst:
- Ubuntu 20.04 (Open-Source-Betriebssystem mit grafischer Oberfläche)
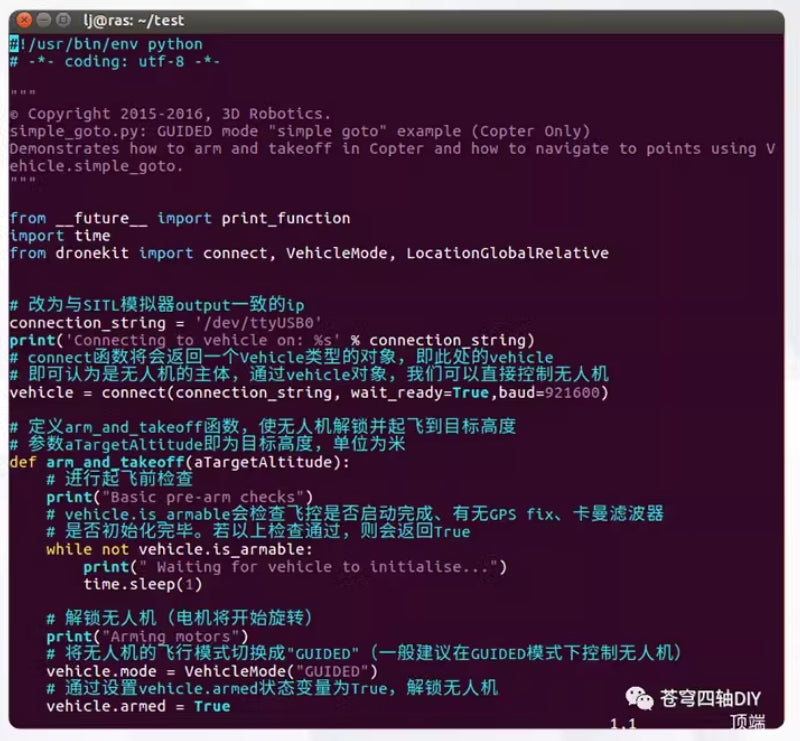
- Dronekit-Python (eine Python-Bibliothek zum Programmieren der Drohnensteuerung mit Dronekit)
- Pymavlink (eine Python-Implementierung des MAVLink-Protokolls, die eine programmierbare Drohnensteuerung mit Pymavlink ermöglicht)
- ROS (Roboter-Betriebssystem)
- Mavros (ein Kommunikationsprotokoll zur Steuerung von Drohnen über ROS)
- Gstreamer (Video-Streaming-Übertragung mit geringer Latenz)
- Mavlink-Router (verteilt MAVLink-Daten des Flugcontrollers an verschiedene Endpunkte)
- OpenCV (Open-Source-Softwarebibliothek zur Computer-Vision-Verarbeitung)

Basierend auf dem oben genannten System kann die Drohne Folgendes erreichen:
- Programmierbare Drohnensteuerung mit Dronekit-Python
2. OPEN CV Visuelle Verarbeitung
Eine CSI-Kamera wurde hinzugefügt, die die Bildübertragung und Nachbearbeitung ermöglicht:
- Visuelle Streams können mit Raspberry Pi erfasst und mit Tools wie OpenCV verarbeitet werden.
- HD-Videostreams in Echtzeit können außerdem zur Verarbeitung an einen PC zurückgesendet oder zur Überprüfung an ein mobiles Gerät gesendet werden.

3. Echtzeit-HD-Videoübertragung
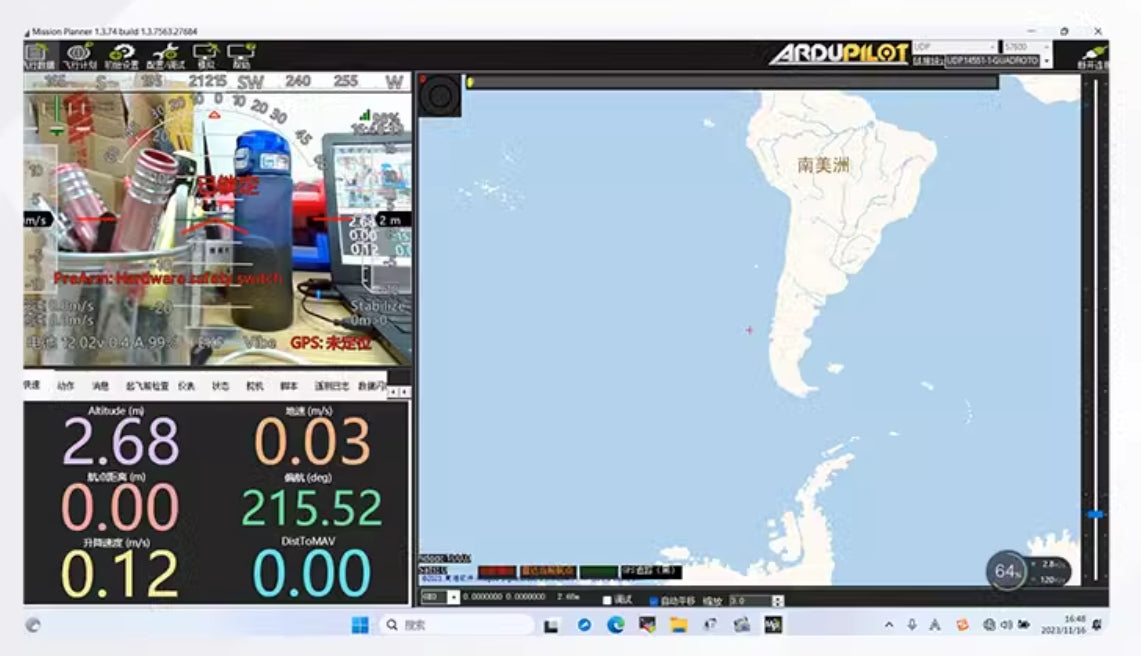
4.Datenüberwachung von Bodenstationen
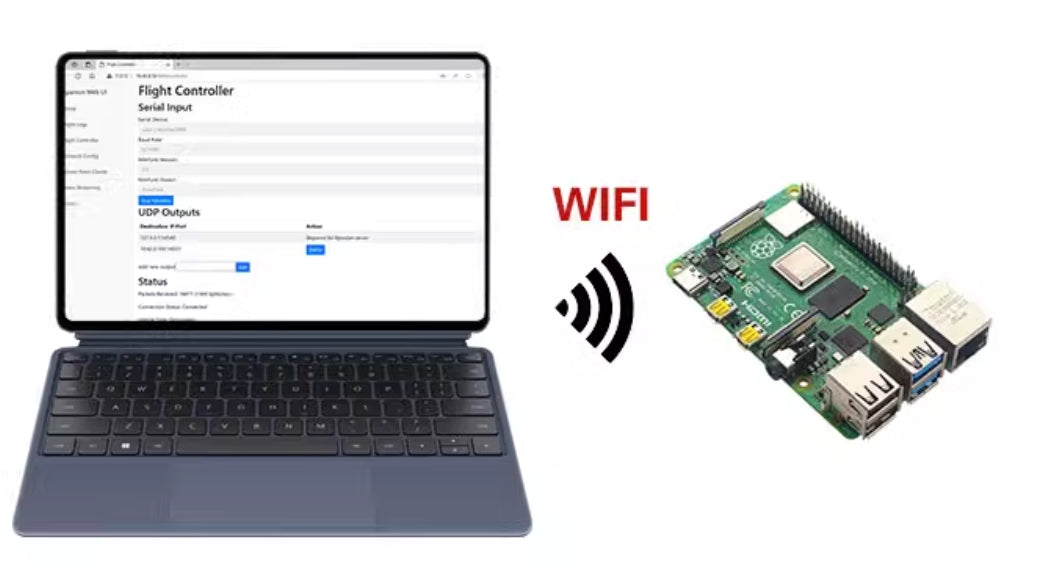
Die Kommunikation und Bildübertragung zwischen dem WLAN-Netzwerk und der PC-Bodenstation (MP) kann ohne zusätzliche Übertragungsmodule erfolgen. Nachdem der PC eine Verbindung zum WLAN-Hotspot der 4B hergestellt hat, kann die Daten- und Bildübertragung durch Zugriff auf 10.42.0.10:3000 über einen Webbrowser.
5. Entwicklung zusätzlicher Funktionen und Algorithmusüberprüfung basierend auf dem oben genannten Open-Source-System
Visuelle Version Unterstützende Tutorials:
Zusätzlich zu den Tutorials der Basisversion werden auch Einführungstutorials zur visuellen Verarbeitung mit Raspberry Pi bereitgestellt.
Related Collections









