







Holybro H-RTK NEO-F9P Rover GNSS Modul mit RM3100 Kompass & IP66 wasserdicht – UAV Drohne CAN & UART RTK GPS
Holybro H-RTK NEO-F9P Rover GNSS Modul mit RM3100 Kompass & IP66 wasserdicht – UAV Drohne CAN & UART RTK GPS
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Das Holybro H-RTK NEO-F9P Rover ist ein professionelles, multibandfähiges RTK GNSS-Positionierungssystem, das den u-blox NEO-F9P Empfänger, einen hochpräzisen PNI RM3100 Kompass und ein IP66-zertifiziertes wasserdichtes Gehäuse bietet. Entwickelt für UAVs, Rover, Marinefahrzeuge und autonome Landfahrzeuge, liefert es Zentimeter-genaue Genauigkeit, schnelle RTK-Konvergenz und außergewöhnliche Zuverlässigkeit in herausfordernden Umgebungen.
Mit Unterstützung für GPS (L1/L5), GLONASS, Galileo, BeiDou und QZSS bietet das Modul Echtzeitkorrekturen über RTCM 3.3 und unterstützt bis zu vier gleichzeitige GNSS-Systeme.Zwei Konnektivitätsoptionen sind verfügbar:
-
UART-Version für Standard-GPS1/GPS2-Ports
-
DroneCAN-Version (mit integriertem STM32G473 MCU, ICM42688 IMU und ICP20100-Barometer) für fortschrittliche CAN-basierte Integration.
Hauptmerkmale
-
u-blox NEO-F9P GNSS-Empfänger: Multi-Band, Multi-Konstellation RTK-Unterstützung für Zentimeter-genaue Genauigkeit
-
PNI RM3100 Kompass: Hochauflösender, niederdriftender Magnetometer ideal für die Stabilität der UAV-Orientierung
-
RTK-fähig: 0.01m + 1ppm RTK horizontale und vertikale Positionierungsgenauigkeit
-
Gleichzeitiges GNSS: Unterstützt GPS, GLONASS, Galileo, BeiDou, QZSS mit bis zu 4 gleichzeitigen Systemen
-
IP66-zertifiziertes Design: Robustes wasserdichtes Gehäuse, ideal für den Einsatz im Freien und in der Industrie
-
DroneCAN Version: Enthält MCU, IMU und Barometer für hochgradige Sensorfusion und Kommunikation
-
Erweiterte Antenne: Gestapelte keramische Patch-Antenne mit L1: 1.8dBi / L5: 0.5dBi Gewinn und 28±2dB LNA
Technische Spezifikation
| Produktmodell |  |
 |
 |
|---|---|---|---|
| SKU | 12060 | 12061 | 12072 |
| Steckertyp | GH1.25 10-poliges Kabel | GH1.25 6-poliges Kabel | GH1.25 4-poliges Kabel |
| Anwendbare Anschlüsse | Holybro GPS1 Anschluss | Holybro oder Cubepilot GPS2 Anschluss | Pixhawk CAN Anschluss |
| Prozessor | NA | NA | STM32G473 |
| IMU & Barometer | NA | NA | ICM42688 & ICP20100 |
| Kommunikationsprotokoll | UART | DroneCAN | |
| GNSS Empfänger | u-blox NEO-F9P | ||
| Empfohlene Anwendung | Rover (UAV, Marine, Landfahrzeug usw.) | ||
| Antenntyp | Gestapelte Keramik-Patch-Antenne | ||
| Antenne Spitzenverstärkung | L1: 1.8dBi L5: 0.5dBi |
||
| Antennen LNA Gewinn | 28 ± 2dB | ||
| Magnetometer | Hochpräziser PNI RM3100 | ||
| GNSS | BeiDou, Galileo, GLONASS, GPS / QZSS | ||
|
GNSS-Band |
B1I, B2a, E1B/C, E5a, L1C/A, L1OF, L5 | ||
| Anzahl der gleichzeitigen GNSS | 4 | ||
| Dynamische Kursgenauigkeit | 0,3 Grad | ||
| Horizontale Positionsgenauigkeit | PVT: 1,5 m CEP SBAS: 1,0 m CEP RTK: 0,01 m +1ppm CEP |
||
| Vertikale Positionsgenauigkeit | PVT: 2,0 m R50 SBAS: 1,5 m R50 RTK: 0,01 m +1ppm R51 |
||
| Kommunikationsprotokoll | UART oder DroneCAN 1Mbit/s | ||
| GNSS-Protokoll | NMEA UBX-Binär RTCM 3.3 SPARTN 2.0.1 |
||
| Zeit bis zur ersten Fixierung | Heißstart: 3s Unterstützte Starts: 4s Kaltstarts: 27s |
||
| Aktualisierungsrate der Navigation | GPS+GLO+GAL+BDS: RTK: 7Hz Max PVT: 7Hz Max RAW: 10Hz |
||
| Anti-Spoofing | Fortgeschrittene Anti-Spoofing-Algorithmen | ||
| Betriebsgrenzen | Dynamik: ≤ 4 g Höhe: 80.000 m Geschwindigkeit: 500 m/s |
||
| Arbeitsspannung | 4,75V~5,25V | ||
| Betriebstemperatur | -25℃ bis 85℃ | ||
| Stromverbrauch | ~250mA | ||
| Kabellänge (Kontaktieren Sie uns für Anpassungen) | 40cm (Standard) | ||
| Abmessungen | Durchmesser: 61,99mm, Höhe: 21mm | ||
| Gewicht | 63.5g | ||
| Wasserdicht IP-Bewertung | IP66 | ||
Details
Beispiel für Schaltplan
Holybro H-RTK Rover-Setup mit Basisstation, Telemetrie-Radio, Flugsteuerung und Bodenstation für präzise Navigation.

Holybro H-RTK NEO-F9P Rover: u-blox GNSS-Empfänger, Zentimeter-RTK-Positionierung, RM3100-Kompass, IP66 bewertet.
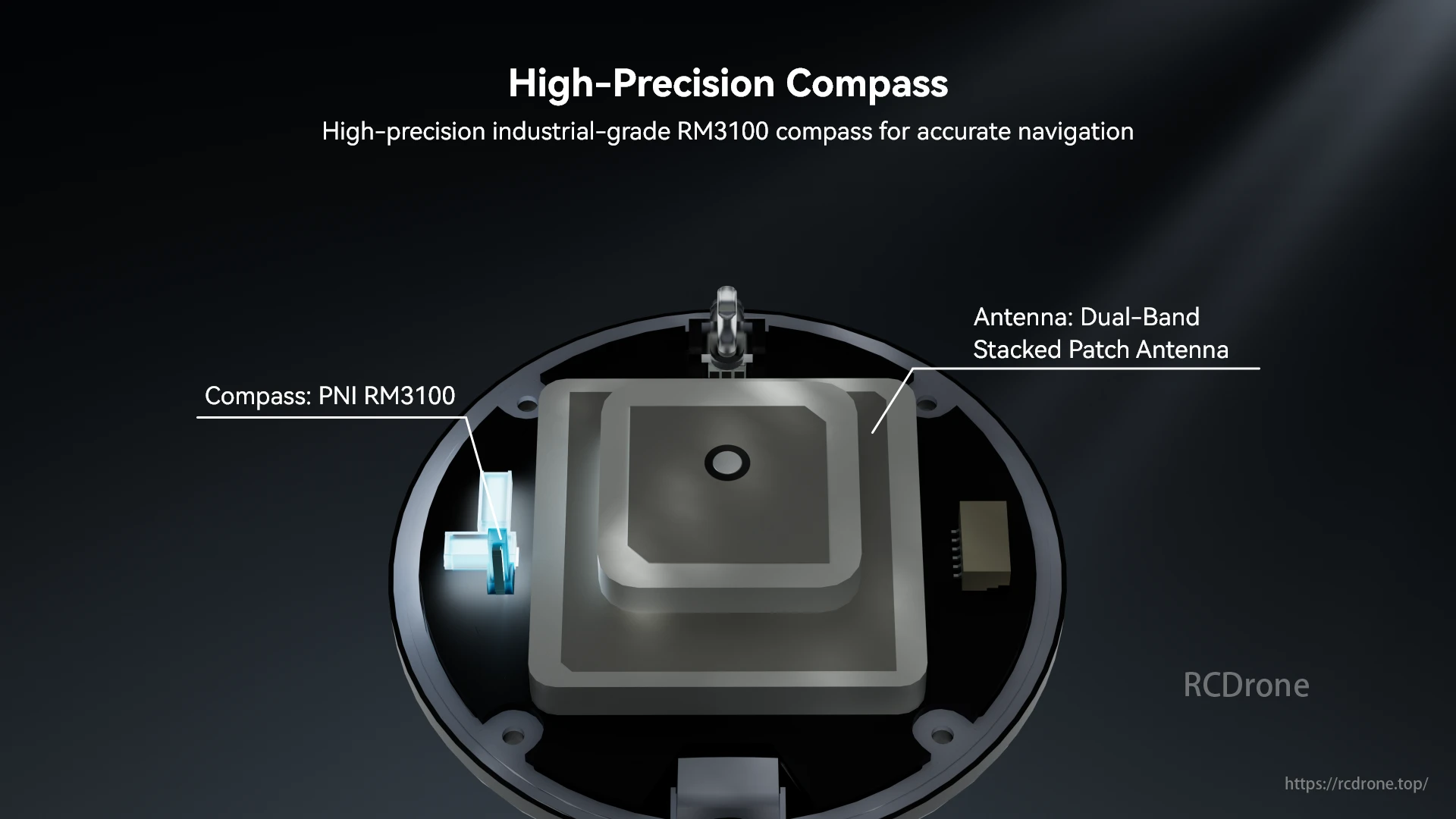
Hochpräziser Kompass: PNI RM3100 für genaue Navigation. Antenne: Dual-Band gestapelte Patch-Antenne enthalten.

Der Holybro H-RTK Rover bietet IP66 Staub- und Wasserschutz und gewährleistet einen zuverlässigen Betrieb in rauen, staubigen und regnerischen Umgebungen.
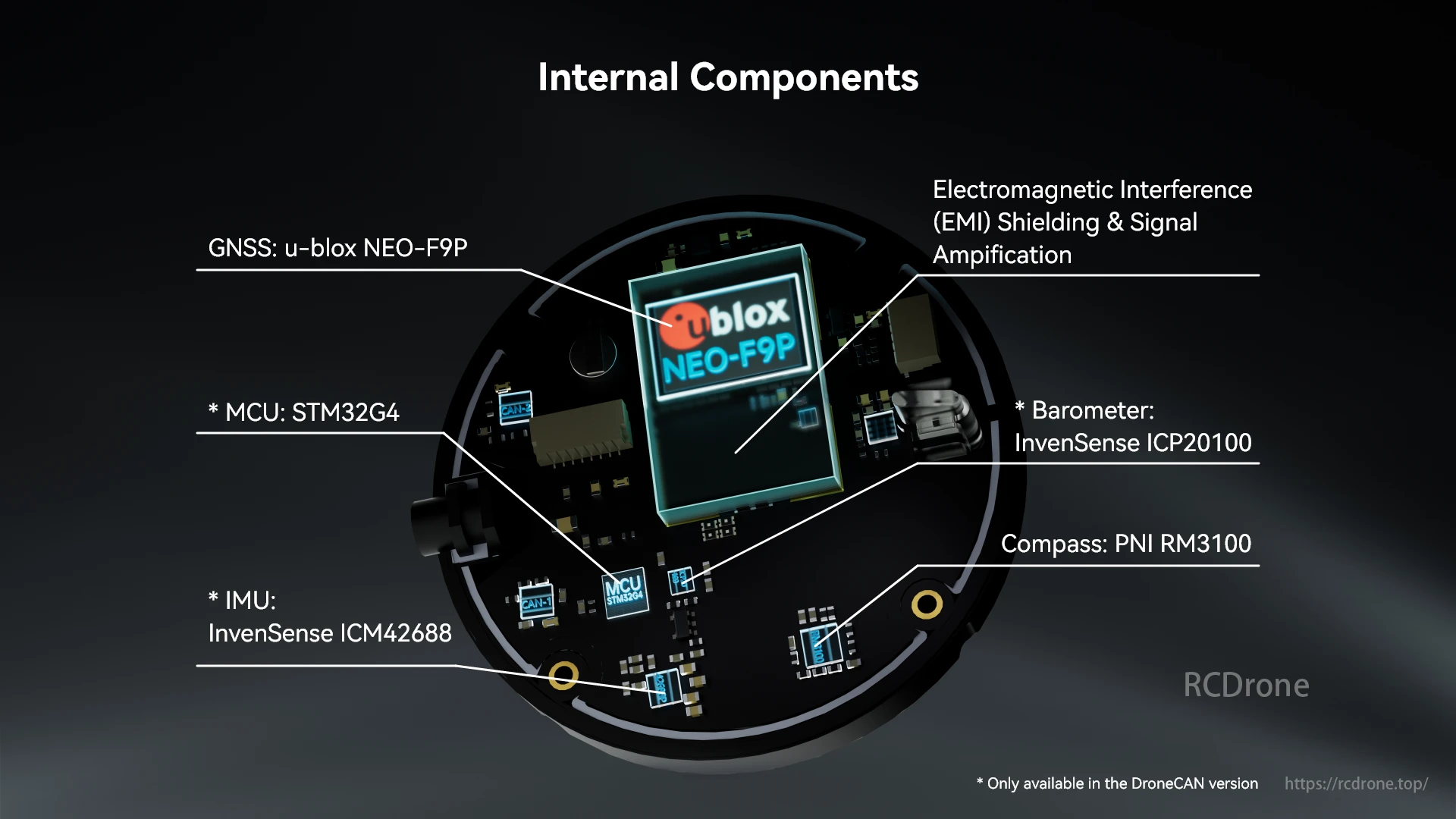
Interne Komponenten: GNSS u-blox NEO-F9P, MCU STM32G4, IMU ICM42688, EMI-Abschirmung, Signalverstärkung, Barometer ICP20100, Kompass RM3100. Die DroneCAN-Version enthält zusätzliche Teile.

Referenzlinks
-
Benutzerhandbuch: Einrichtung & Erste Schritte (Ardupilot)
- Benutzerhandbuch: Einrichtung & Erste Schritte (PX4)
- GPS-Richtung/Gier (auch bekannt als bewegte Basislinie) Anleitung
- Pinbelegung
- Abmessungen
- Downloads
- Spezieller Vergleich mit verschiedenen Antennen
Lieferumfang:
1x NEO-F9P Rover
1x UART zu USB-Konverter (Nur in der UART-Version enthalten)
1x Carbonfaser-Ständer mit Montagematerial
Related Collections









