Kit de desarrollo de drones de ensamblaje CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit de drones de bricolaje programable de código abierto industrial con bastidor anticolisión
Kit de desarrollo de drones de ensamblaje CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit de drones de bricolaje programable de código abierto industrial con bastidor anticolisión
RCDrone
No se pudo cargar la disponibilidad de retiro
Descripción general
El kit de desarrollo de drones de ensamblaje CQ230 es un kit compacto y de código abierto Drone casero Plataforma impulsada por el Frambuesa Pi 4B y Halcón de Pixie Controlador de vuelo. Con una distancia entre ejes de 230 mm, un marco anticolisión y un sistema de alimentación de 4S (16,8 V), este dron es ideal para aprender y experimentar con funciones programables de código abierto. La plataforma está completamente equipada para tareas como navegación por puntos de referencia, monitoreo de datos y transmisión de video en tiempo real, lo que la convierte en una excelente opción tanto para desarrolladores como para principiantes.
Características principales
- Diseño compactoCon un tamaño de 360 mm x 360 mm x 300 mm, el dron es ideal para espacios pequeños.
- Bastidor anticolisión:El marco anticolisión totalmente de fibra de carbono garantiza durabilidad y protección.
- Integración de Raspberry Pi 4B:Mejorado con Ubuntu 20.04 para un funcionamiento y desarrollo fluidos.
- Marco de código abierto: Desarrollado por Piloto Arduino, compatible con Dronekit, MAVLink y ROS.
- Programable Tareas:Capaz de navegación autónoma, monitoreo de datos en tiempo real y procesamiento visual.
- Navegación por puntos de referencia:Establezca rutas con precisión basada en GPS.
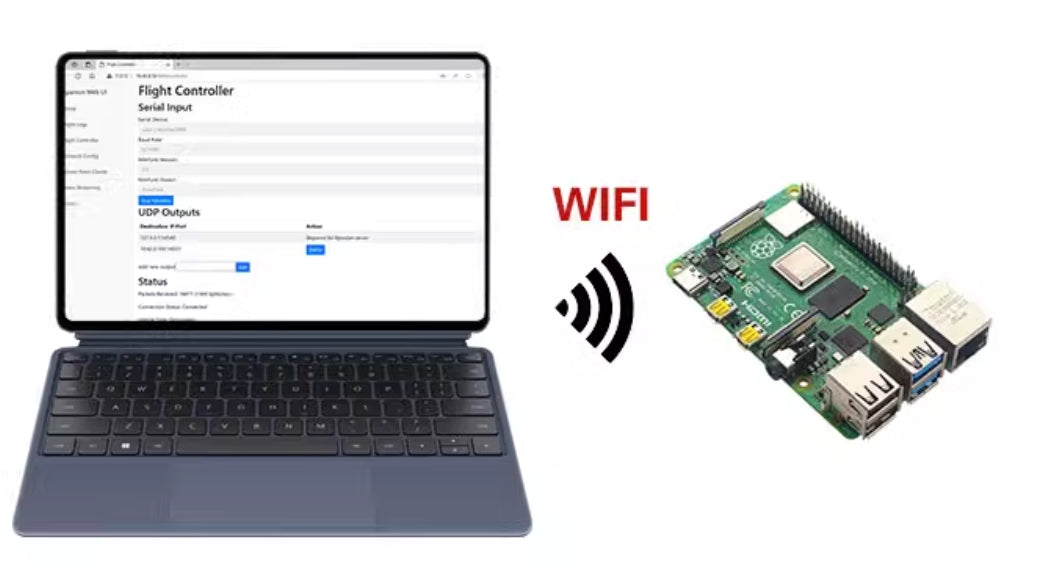
- Transmisión de datos en tiempo real:Transferencia de datos mediante WiFi a estaciones terrestres.
- Navegación visual:Sistemas de doble cámara para una navegación precisa en interiores y evitación de obstáculos.
- Controles programables:Utilice Dronekit-Python para crear comandos de vuelo personalizados.
- Simulación de sistemas:Combine la simulación SITL para realizar pruebas de funcionalidad sin inconvenientes.
Presupuesto
| Parámetro | Detalles |
|---|---|
| Modelo | CQ230 |
| Distancia entre ejes | 230 mm |
| Batería | 4S (16,8 V) |
| Tiempo de vuelo | 7 minutos |
| Capacidad de carga útil | 200 gramos |
| Resistencia al viento | Nivel 3-4 |
| Velocidad máxima | 20 kilómetros por hora |
| Altitud máxima de vuelo | 120 metros |
| Precisión de posicionamiento | 2-3 m (GPS) |
| Peso | 612 gramos |
| Alcance del control remoto | 700 metros |
Paquete
Versión básica
- Controlador de vuelo Pixhawk 2.4.8 ×1
- GPS M8N ×1
- Módulo de alimentación Ledi MINI PIX ×1
- Telemetría WiFi CUAV ×1
- ESC 30A ×4
- 5045 Hélice ×4
- Marco CQ230 ×1
- Cargador de equilibrio A400 ×1
- Batería 4S 2300mAh ×1
- Motor 2205 ×4
- Mando a distancia FS-i6 ×1
- Zumbador de alarma BB ×1
- Módulo de flujo óptico MF-01 ×1
Versión visual
- Pixhawk 2.4.8 Compañía de vuelocontrolador ×1
- GPS M8N ×1
- Módulo de alimentación Ledi MINI PIX ×1
- Cámara CS ×1
- ESC 30A ×4
- 5045 Hélice ×4
- Marco CQ230 ×1
- Zumbador de alarma BB ×1
- Módulo de flujo óptico MF-01 ×1
- Cargador de equilibrio A400 ×1
- Batería 4S 2300mAh ×1
- Motor 2205 ×4
- Mando a distancia FS-i6 ×1
- Computadora de a bordo Raspi 4B-4G × 1 juego
- Cámara visual T265 ×1
Aplicaciones
- Entrega:Transporte artículos livianos de manera eficiente.
- Desarrollo Educativo:Ideal para que estudiantes e investigadores exploren sistemas de drones.
- Procesamiento visual:Utilice OpenCV para la transmisión y el análisis de vídeo avanzados.
- Experimentos de navegación:Experimente con vuelo autónomo basado en GPS y seguimiento de posición.
Notas adicionales
- El sistema incluye Ubuntu 20.04 para una interfaz de programación mejorada.
- El sólido ecosistema de Ardupilot garantiza escalabilidad y versatilidad en aplicaciones de drones.
- Un kit de aprendizaje completo con tutoriales para principiantes y profesionales.
Detalles
Sistema de drones de código abierto CQ230

Pixhawk: sistema de hardware para drones
Utiliza el controlador Pixhawk 2.4.8, equipado con el nuevo procesador estándar de 32 bits STM32F427 y emparejado con el barómetro 5611. Es un controlador de código abierto rentable con abundantes opciones de interfaz.

ArduPilot: Sistema de software para drones
El sistema de software del dron (esencialmente el firmware de control) utiliza el proyecto de código abierto ampliamente adoptado ArduPilot.
(ArduPilot proporciona un sistema de software de piloto automático de código abierto, avanzado, completo y confiable).
Puede controlar todos los sistemas de drones imaginables. Para los amantes de la tecnología, los drones y la exploración, entender ArduPilot les permitirá descubrir un mundo fascinante y atractivo.

ArduPilot se ha instalado en más de 1.000.000 de sistemas de drones en todo el mundo. Equipado con herramientas avanzadas de registro de datos, análisis y simulación, es un sistema de piloto automático fiable y probado exhaustivamente. También lo utilizan importantes organizaciones y empresas como la NASA, Intel, Insitu, Boeing y numerosos institutos y universidades de todo el mundo para pruebas y desarrollo.

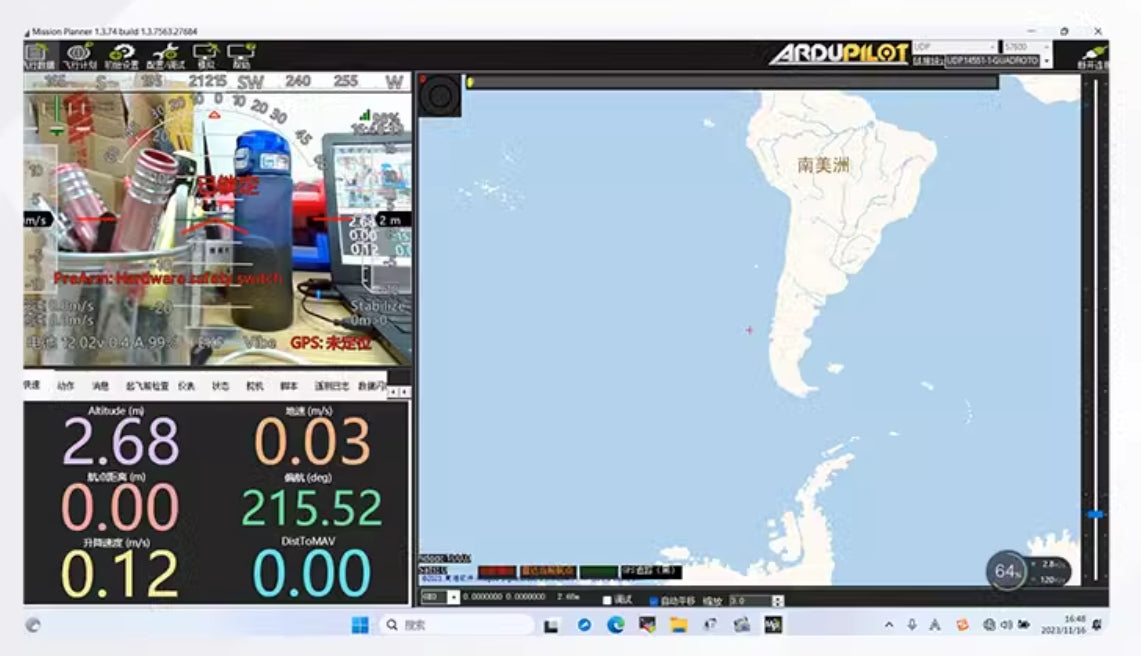
Estación de control terrestre del planificador de misiones
Características:
- Herramientas de configuración de parámetros y ajuste de drones;
- Establecer rutas de vuelo en mapas, permitiendo que los drones sigan rutas preestablecidas automáticamente;
- Seleccione comandos de misión de los menús desplegables para controlar el dron;
- Descargar y analizar registros;
- Realizar simulaciones utilizando el sistema SITL (Software In The Loop);
- Hay más funciones esperando a que las descubras, y las posibilidades no terminan aquí...


| Funciones predefinidas | Versión básica | Versión visual |
|---|
| Dibujo lineal | ✓ | ✓ |
| Mantener la altitud, vuelo estacionario, estabilización | ✓ | ✓ |
| Regreso a casa, regreso seguro | ✓ | ✓ |
| Aterrizaje, aterrizaje con batería baja | ✓ | ✓ |
| Posicionamiento GPS en exteriores y vuelo de ruta | ✓ | ✓ |
| Dronekit: control programable en Python | ✓ | ✓ |
| Telemetría WiFi para transmisión de datos en tiempo real (alcance aproximado de 5 m) | ✗ | ✓ |
| Posicionamiento de flujo óptico en interiores, fijación de altitud por láser | ✓ | ✓ |
| Navegación de posicionamiento visual dual en interiores, puntos de anclaje MP, vuelo de ruta, aterrizaje preciso con reconocimiento de código QR | ✗ | ✓ |
Adecuado para volar en interiores
Diseño compacto con dimensiones de 360 mm × 360 mm × 300 mm, ideal para operaciones en espacios pequeños.

Marco de fibra de carbono, fuerte y resistente a las caídas.

El diseño del anillo anticolisión protege eficazmente el motor y las palas de la hélice para garantizar la seguridad del vuelo;

Capacidad de expansión mejorada para el desarrollo funcional en múltiples escenarios
Basado en el modelo básico, el sistema añade Raspberry Pi 4B y tiene integrado el sistema Raspberry Pi. Este sistema incluye:
- Ubuntu 20.04 (sistema operativo de código abierto con interfaz gráfica)
- Dronekit-Python (una biblioteca de Python para programar el control de drones usando Dronekit)
- Enlace Pymav (una implementación en Python del protocolo MAVLink, que permite el control programable de drones mediante Pymavlink)
- ROS (Sistema operativo robotico)
- Mavros (un protocolo de comunicación para controlar drones a través de ROS)
- Transmisor de G (transmisión de video en tiempo real de baja latencia)
- Enrutador Mavlink (distribuye los datos del controlador de vuelo MAVLink a diferentes puntos finales)
- OpenCV (biblioteca de software de código abierto para el procesamiento de visión por computadora)

Basándose en el sistema anterior, el dron puede lograr:
- Control de drones programable usando Dronekit-Python
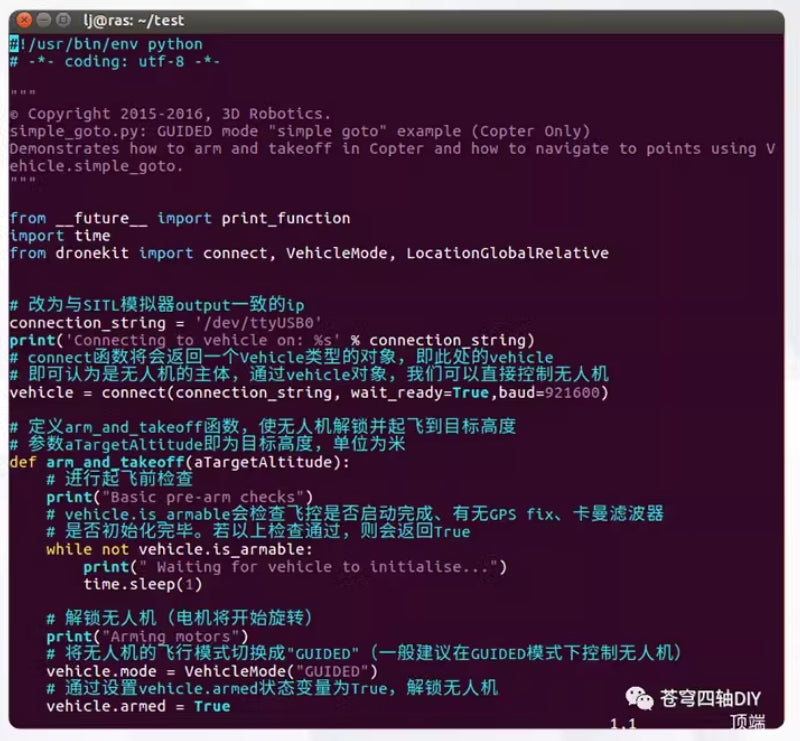
2. ABIERTO CV Procesamiento Visual
Se agregó una cámara CSI, lo que permite la transmisión de imágenes y el posprocesamiento:
- Las transmisiones visuales se pueden capturar usando Raspberry Pi y procesar con herramientas como OpenCV.
- Las transmisiones de video HD en tiempo real también se pueden transmitir a una PC para su procesamiento o enviar a un dispositivo móvil para su revisión.

3. Transmisión de vídeo HD en tiempo real
4.Monitoreo de datos de estaciones terrestres
La comunicación y transmisión de imágenes entre la red WiFi y la estación terrestre de PC (MP) se puede lograr sin necesidad de módulos de transmisión adicionales. Una vez que la PC se conecta al punto de acceso WiFi del 4B, se puede iniciar la transmisión de datos e imágenes accediendo 10.42.0.10:3000 a través de un navegador web.
5. Desarrollo de funciones adicionales y verificación de algoritmos basados en el sistema de código abierto mencionado anteriormente
Tutoriales de soporte de la versión visual:
Además de los tutoriales de la versión básica, también se proporcionan tutoriales introductorios para el procesamiento visual de Raspberry Pi.