







Holybro H-RTK NEO-F9P Módulo GNSS Rover con brújula RM3100 e IP66 impermeable – GPS RTK CAN & UART para dron UAV
Holybro H-RTK NEO-F9P Módulo GNSS Rover con brújula RM3100 e IP66 impermeable – GPS RTK CAN & UART para dron UAV
HolyBro
No se pudo cargar la disponibilidad de retiro
Descripción
El Holybro H-RTK NEO-F9P Rover es un sistema de posicionamiento RTK GNSS de grado profesional, multi-banda, que cuenta con el receptor u-blox NEO-F9P, una brújula PNI RM3100 de alta precisión y una carcasa impermeable con clasificación IP66. Diseñado para UAVs, rovers, embarcaciones marinas y vehículos terrestres autónomos, ofrece precisión a nivel de centímetros, rápida convergencia RTK y una excepcional fiabilidad en entornos desafiantes.
Con soporte para GPS (L1/L5), GLONASS, Galileo, BeiDou y QZSS, el módulo proporciona correcciones en tiempo real a través de RTCM 3.3 y soporta hasta cuatro sistemas GNSS concurrentes.Dos opciones de conectividad están disponibles:
-
Versión UART para puertos GPS1/GPS2 estándar
-
Versión DroneCAN (con MCU STM32G473, IMU ICM42688, y barómetro ICP20100) para integración avanzada basada en CAN.
Características Clave
-
Receptor GNSS u-blox NEO-F9P: Soporte RTK de múltiples bandas y constelaciones para precisión a nivel de centímetros
-
Compás PNI RM3100: Magnetómetro de alta resolución y bajo deriva ideal para la estabilidad de orientación de UAV
-
Habilitado para RTK: 0.01m + 1ppm RTK precisión de posicionamiento horizontal y vertical
-
GNSS concurrente: Soporta GPS, GLONASS, Galileo, BeiDou, QZSS con hasta 4 sistemas concurrentes
-
Diseño clasificado IP66: Caja impermeable robusta, ideal para implementaciones al aire libre e industriales
-
DroneCAN Versión: Incluye MCU, IMU y barómetro para fusión de sensores de alto nivel y comunicación
-
Antena avanzada: Antena de parche cerámico apilada con L1: 1.8dBi / L5: 0.5dBi de ganancia y 28±2dB LNA
Especificación
| Modelo de Producto |  |
 |
 |
|---|---|---|---|
| SKU | 12060 | 12061 | 12072 |
| Tipo de Conector | Cable GH1.25 de 10 pines | Cable GH1.25 de 6 pines | GH1.25 cable de 4 pines |
| Puertos aplicables | Puerto GPS1 de Holybro | Puerto GPS2 de Holybro o Cubepilot | Puerto CAN de Pixhawk |
| Procesador | NA | NA | STM32G473 |
| IMU y Barómetro | NA | NA | ICM42688 y ICP20100 |
| Protocolo de Comunicación | UART | DroneCAN | |
| Receptor GNSS | u-blox NEO-F9P | ||
| Aplicación Recomendada | Rover (UAV, Marítimo, Vehículo Terrestre, etc.) | ||
| Tipo de Antena | Antena de Parche Cerámico Apilado | ||
| Ganancia Máxima de Antenas | L1: 1.8dBi L5: 0.5dBi |
||
| Antenas LNA Ganancia | 28 ± 2dB | ||
| Magnetómetro | Alta Precisión PNI RM3100 | ||
| GNSS | BeiDou, Galileo, GLONASS, GPS / QZSS | ||
|
Banda GNSS |
B1I, B2a, E1B/C, E5a, L1C/A, L1OF, L5 | ||
| Número de GNSS Concurrentes | 4 | ||
| Precisión de Dirección Dinámica | 0.3 grados | ||
| Precisión de Posicionamiento Horizontal | PVT: 1.5 m CEP SBAS: 1.0m CEP RTK: 0.01 m +1ppm CEP |
||
| Precisión de Posicionamiento Vertical | PVT: 2.0 m R50 SBAS: 1.5m R50 RTK: 0.01 m +1ppm R51 |
||
| Protocolo de Comunicación | UART o DroneCAN 1Mbit/s | ||
| Protocolo GNSS | NMEA UBX binario RTCM 3.3 SPARTN 2.0.1 |
||
| Tiempo-Para-Primer-Fijo | Inicio Rápido: 3s Inicios asistidos: 4s Inicios en frío: 27s |
||
| Tasa de Actualización de Navegación | GPS+GLO+GAL+BDS: RTK: 7Hz Máx PVT: 7Hz Máx RAW: 10Hz |
||
| Anti-suplantación | Algoritmos avanzados de anti-suplantación | ||
| Límites operativos | Dinamismo: ≤ 4 g Altitud: 80,000 m Velocidad: 500 m/s |
||
| Tensión de trabajo | 4.75V~5.25V | ||
| Temperatura de operación | -25℃ a 85℃ | ||
| Consumo de corriente | ~250mA | ||
| Longitud del cable (Contáctenos para personalización) | 40cm (predeterminado) | ||
| Dimensiones | Diámetro: 61.99mm, Altura: 21mm | ||
| Peso | 63.5g | ||
| Clasificación de impermeabilidad IP | IP66 | ||
Detalles
Diagrama de cableado de muestra
Configuración del Holybro H-RTK Rover con estación base, radio de telemetría, controlador de vuelo y estación de control terrestre para navegación precisa.

Holybro H-RTK NEO-F9P Rover: receptor GNSS u-blox, posicionamiento RTK de centímetros, brújula RM3100, clasificado IP66.
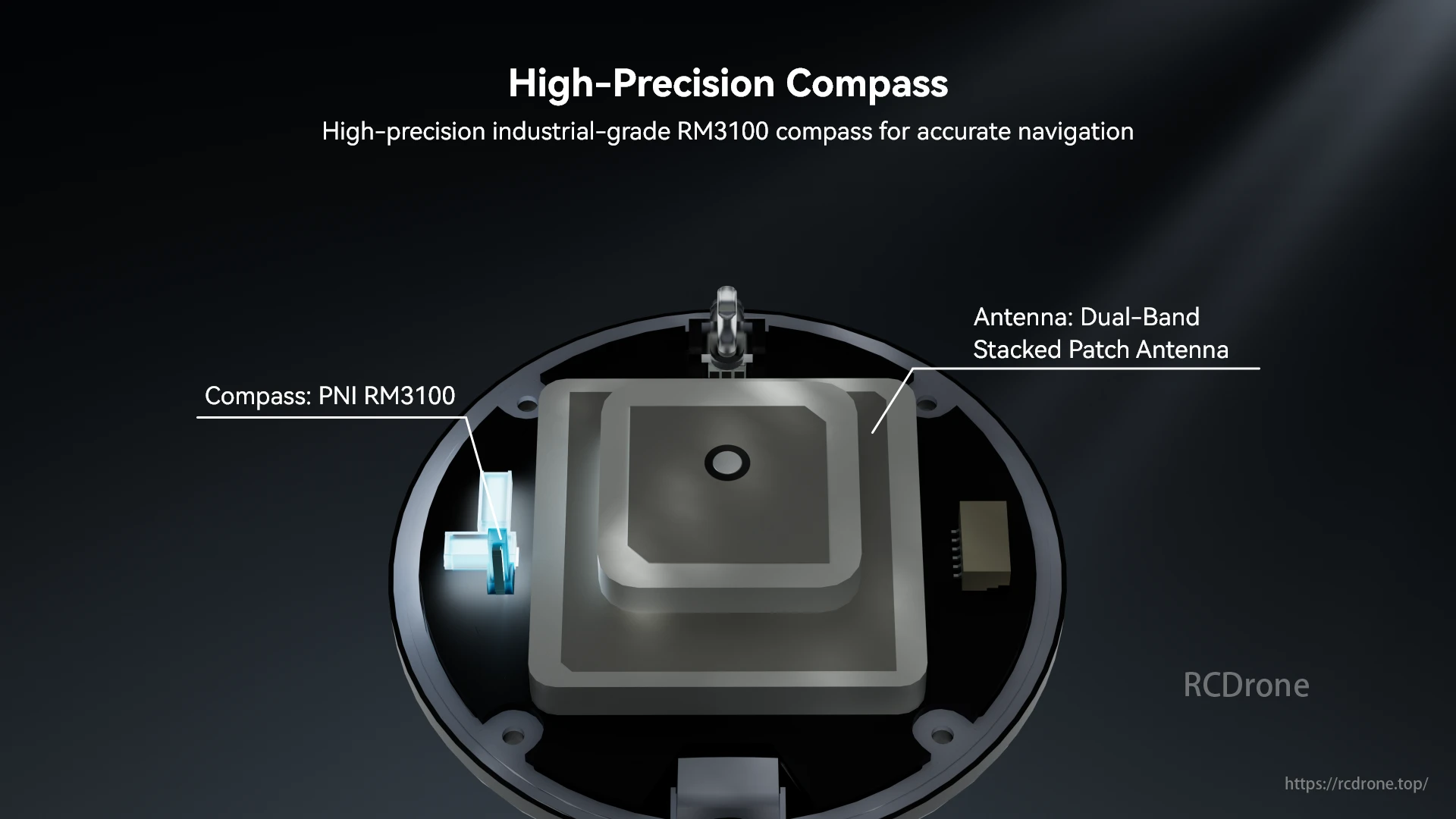
Brújula de alta precisión: PNI RM3100 para navegación precisa. Antena: Antena de parche apilada de doble banda incluida.

Holybro H-RTK Rover ofrece protección contra el polvo y el agua IP66, asegurando un funcionamiento confiable en entornos duros, polvorientos y lluviosos.
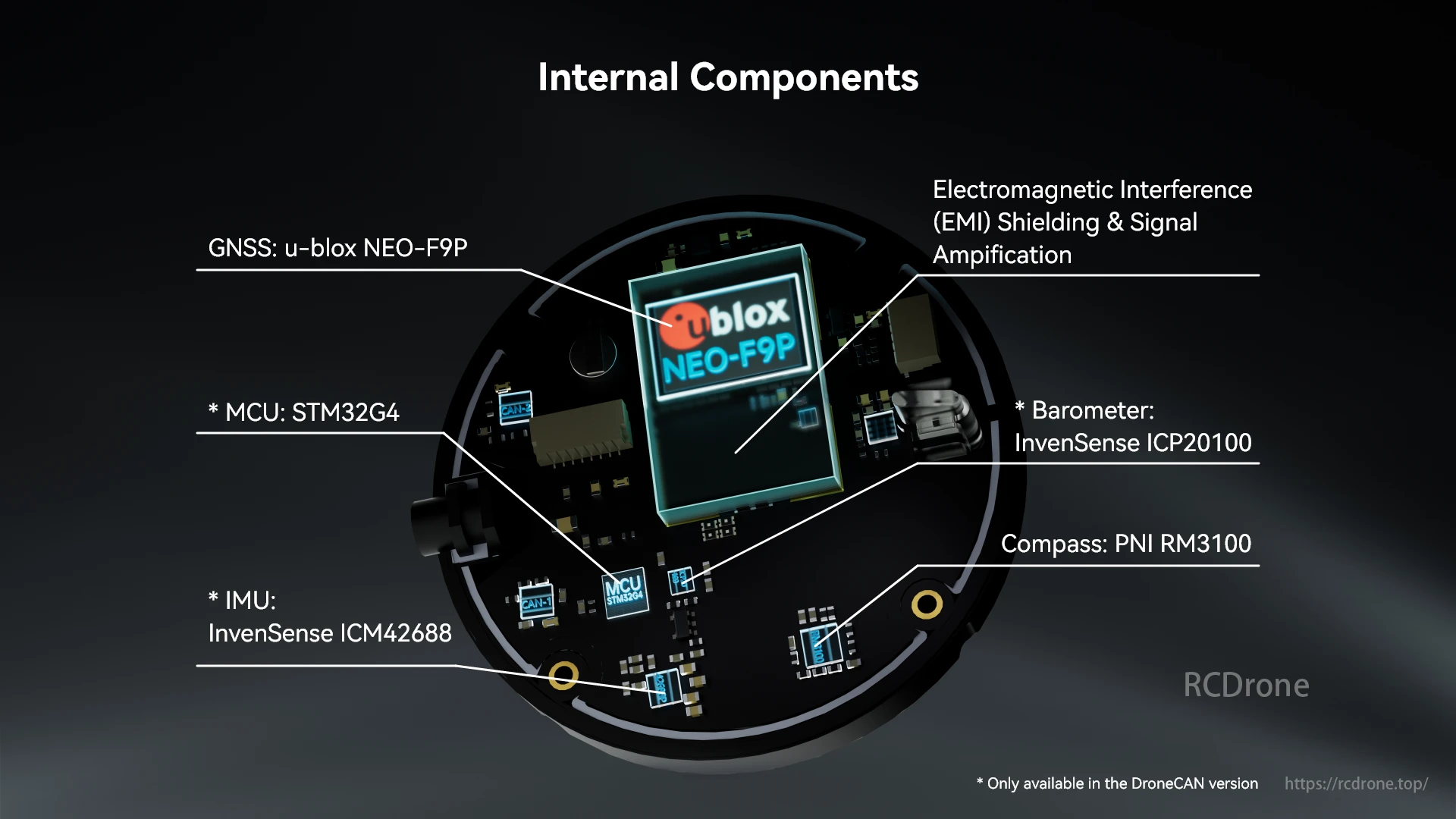
Componentes internos: GNSS u-blox NEO-F9P, MCU STM32G4, IMU ICM42688, blindaje EMI, amplificación de señal, barómetro ICP20100, brújula RM3100. La versión DroneCAN incluye piezas adicionales.

Enlaces de referencia
-
Guía del usuario: Configuración y primeros pasos (Ardupilot)
- Guía del usuario: Configuración y primeros pasos (PX4)
- Guía de dirección/compás GPS (también conocido como línea base móvil)
- Pinout
- Dimensiones
- Descargas
- Comparación de especificaciones con diferentes antenas
Paquete incluido:
1x NEO-F9P Rover
1x Convertidor de UART a USB (Solo viene con la versión UART)
1x soporte de fibra de carbono con hardware de montaje
Related Collections









