




محرک سروو MyActuator RMD-X12-320، موتور یکپارچه با گشتاور بالا با EtherCAT و CAN BUS، مبدل USB-CAN، مقاومت 120Ω
محرک سروو MyActuator RMD-X12-320، موتور یکپارچه با گشتاور بالا با EtherCAT و CAN BUS، مبدل USB-CAN، مقاومت 120Ω
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
بررسی
محصول MyActuator RMD-X12-320 یک عملگر سرو با عملکرد بالا است که برای رباتهای صنعتی، رباتهای همکاریکننده و سیستمهای اتوماسیون با دقت بالا طراحی شده است. این محصول یک موتور با گشتاور بالا، جعبه دنده سیارهای و الکترونیکهای پیشرفته در یک فرم فشرده ادغام میکند و کنترل حرکتی بینقص و ارتباط قابل اعتماد EtherCAT یا CAN BUS را امکانپذیر میسازد.
با طراحی بهینه و گزینههای رابط غنی، RMD-X12-320 کارایی استثنایی، کنترل دقیق و انعطافپذیری را برای برنامههای رباتیک پرچالش فراهم میکند.
ویژگیهای کلیدی
-
طراحی یکپارچه: موتور، درایور و کاهنده در یک ماژول فشرده ادغام شدهاند.
-
خروجی گشتاور بالا: ایدهآل برای مفاصل رباتیک سنگین و سیستمهای اتوماسیون.
-
پروتکلهای ارتباطی متعدد: از هر دو EtherCAT و CAN BUS پشتیبانی میکند.
-
بازخورد دقیق: انکودرهای با دقت بالا برای حرکت و موقعیتیابی روان.
-
نصب و راهاندازی آسان: کابلهای با برچسب واضح و آداپتورهای شامل شده برای راهاندازی سریع.
-
سازگاری گسترده: مناسب برای رباتهای صنعتی، رباتهای همکاریکننده، AGVها و بازوهای اتوماسیون.
توضیحات رابط
| پورت | تعریف | توضیحات |
|---|---|---|
| 1. EtherCAT_OUT | خروجی EtherCAT | خروجی ارتباطی به سایر ماژولها. |
| 2. EtherCAT_IN | ورودی EtherCAT | ورودی ارتباطی از کنترلر اصلی. |
| 3. VCC | منبع تغذیه مثبت | ورودی DC مثبت اصلی. |
| 4. CAN_L | CAN bus پایین | سیگنال پایین CAN برای ارتباط CAN. |
| 5. CAN_H | CAN bus بالا | سیگنال بالا CAN برای ارتباط CAN. |
| 6. GND | زمین | ترمینال منفی قدرت. |
| 7. T- / 8. T+ | خطوط بازخورد | بازخورد وضعیت ماژول به ایستگاه اصلی. |
| 9. R- / 10. R+ | خطوط فرمان | سیگنالهای کنترلی ارسال شده از ایستگاه اصلی به عملگر. |
لوازم جانبی شامل
| برچسب | مورد | توضیحات |
|---|---|---|
| الف | منبع تغذیه + کابل CAN BUS ×2 | شامل کانکتور منبع تغذیه XT90 با خطوط سفید (CAN_L)، زرد (CAN_H)، قرمز (VCC) و سیاه (GND). |
| ب | مقاومت ترمینال 120Ω ×1 | برای ترمینیشن CAN BUS. |
| ج | کابل ارتباطی EtherCAT ×2 | کانکتورهای 4 پین SH1.0mm برای انتقال و دریافت سیگنال EtherCAT. |
| د | ماژول ارتباطی CAN BUS ×1 | مبدل USB به CAN برای تشخیص و یکپارچهسازی.شامل ترمینیشن 120Ω قابل تعویض است. |
اطلاعات بستهبندی
-
ابعاد جعبه: 280 میلیمتر (طول) × 230 میلیمتر (عرض) × 130 میلیمتر (ارتفاع)
-
محتویات:
-
X12-320 سرو اکچواتور ×1
-
منبع تغذیه + کابل ارتباطی CAN BUS ×2
-
مقاومت ترمینال 120Ω ×1
-
کابل ارتباطی EtherCAT ×2
-
ماژول ارتباطی CAN BUS ×1 (آداپتور USB-CAN)
-
کاربردها
-
رباتهای صنعتی و رباتهای همکاریکننده
-
AGVها (وسایل نقلیه هدایتشده خودکار) و AMRها (رباتهای متحرک خودکار)
-
بازوهای رباتیک برای اتوماسیون و مونتاژ دقیق
پلتفرمهای تحقیق و توسعه که به کنترل حرکت قابل اعتماد نیاز دارند
جزئیات
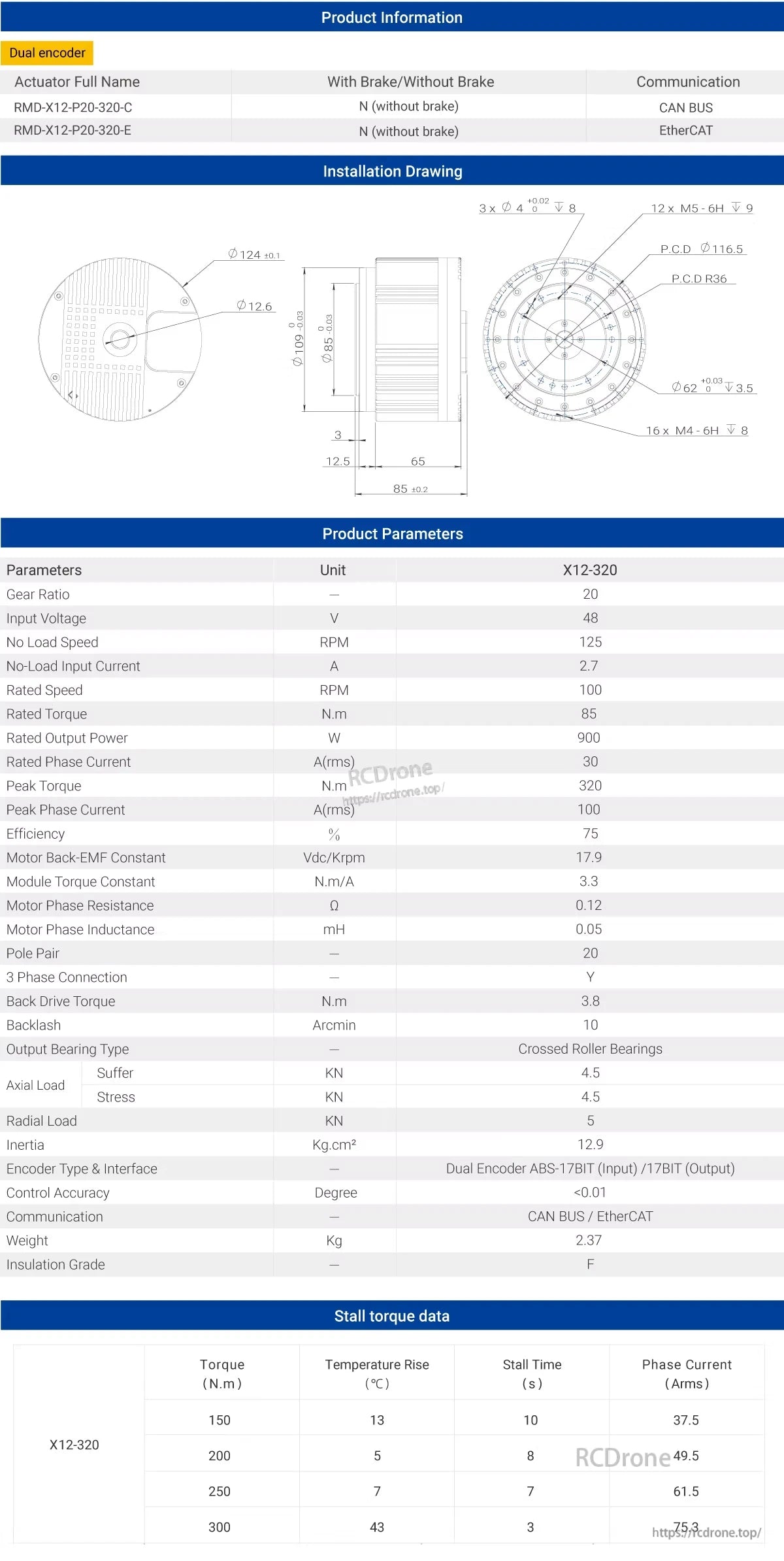
محرک من محرک سرو RMD-X12-P20-320، انکودر دوگانه، نسبت دنده 20، ورودی 48 ولت، توان 900 وات، گشتاور نامی 85 نیوتنمتر، ارتباط CAN BUS/EtherCAT، 2.37 کیلوگرم وزن، بلبرینگهای غلتکی متقاطع، اینرسی 12.9 کیلوگرم.سانتیمتر².

رابط سروو X12-320 از EtherCAT، CAN bus و اتصالات برق پشتیبانی میکند. بستهبندی: 280×230×130 میلیمتر. شامل منبع تغذیه، کابلها، مقاومتها و آداپتور USB-CAN رایگان.

لوازم جانبی X12-320 شامل منبع تغذیه، کابلهای CAN BUS و EtherCAT و جزئیات ماژول است. سیمها، کانکتورها و ترمینالهای رنگی کدگذاری شده نصب صحیح را تضمین میکنند. آداپتور USB-CAN رایگان به ازای هر سفارش شامل میشود.

سروو RMD X12 320: پاسخ 100 میکروثانیه، انکودر دوگانه، EtherCAT/CAN، گشتاور 320 نیوتنمتر، Ø124 میلیمتر×85 میلیمتر، برای رباتیک و اتوماسیون.

موتور سروو RMD-X12-P20-320-C : ورودی 48 ولت، نسبت دنده 20:1، قدرت اوج 900 وات، انکودرهای دوگانه 17 بیتی، CAN BUS/EtherCAT، 2.37 کیلوگرم، با ابعاد دقیق.

موتور سرو X12-320L با قدرت، کابلهای CAN BUS، کابلهای EtherCAT و مقاومت پایانی 1200.

نمایش بستهبندی سرو MYACTUATOR، شامل کابلهای CAN BUS و مقاومت 120Ω.
Related Collections




