نوع کنترلر پرواز
-

استکهای کنترلر پرواز
مجموعه برتر ما از پشتههای کنترلر پرواز برای پهپادهای FPV را بررسی...
-
کنترل کننده پرواز F4
مجموعه F4 Flight Controller دارای بردهای همه کاره و با کارایی بالا...
-
کنترل کننده پرواز F7
مجموعه F7 Flight Controller با استفاده از بردهای مبتنی بر F4، قدرت...
-

کنترل کننده پرواز H7
این مجموعه کنترل پرواز H7 دارای طیف وسیعی از سیستم های خلبان...
-

کنترلرهای پرواز Betaflight
کنترلر پرواز بتافلایت یک کنترلر محبوب و با عملکرد بالا است که...
-
کنترل کننده های پرواز INAV
مجموعه کنترلکنندههای پرواز INAV را کاوش کنید—تنظیم دقیق برای پهپادهای بال ثابت،...
-
کنترل کننده پرواز Ardupilot
ما را کاوش کنید مجموعه کنترل پرواز ArduPilot، دارای کنترلرهای پرواز قدرتمند...
-
کنترل کننده های پرواز PX4
این کنترلر پرواز PX4 پیشنهادات مجموعه سیستمهای خلبان خودکار منبع باز و...
-

کنترلرهای پرواز SpeedyBee
SpeedyBee مجموعهای متنوع از کنترلکنندههای پرواز با عملکرد بالا برای پهپادهای FPV...
-

کنترل کننده پرواز ماتک
این کنترلر پرواز Matek مجموعه طیف گسترده ای از کنترلرهای پرواز با...
-

کنترل کننده پرواز Kakute
این کنترلر پرواز Kakute سری Holybro برای هواپیماهای بدون سرنشین FPV، هواپیماهای...







توسط برنامه Flight Controller
-
کنترل کننده پرواز FPV
مجموعه FPV Flight Controller طیف گسترده ای از FC های قدرتمند را...
-

کنترل کننده پرواز بال ثابت
محدوده ممتاز ما را کاوش کنید کنترلرهای پرواز بال ثابت، برای پهپادهای...
-

کنترلر پرواز پهپاد کشاورزی
کنترلکننده پرواز (FC) به عنوان مغز یک پهپاد کشاورزی عمل میکند و...
-

کنترل کننده پرواز صنعتی
دقت و عملکرد را با ما باز کنید کنترلر پرواز صنعتی مجموعه،...
-

کنترل کننده پرواز VTOL
این کنترلر پرواز VTOL دارای کنترلرهای پرواز پیشرفته طراحی شده برای هواپیماهای...




نام تجاری کنترل پرواز
-

کنترلر پرواز JIYI
جیایئی (JIYI) در زمینه سیستمهای پیشرفته خلبان خودکار برای پهپادهای کشاورزی و...
-

کنترل کننده پرواز Autopilot Holybro
کاوش کنید کنترلر پرواز خودکار هولیبرو سری، دارای راه حل های پیشرفته...
-
کنترل کننده پرواز Autopilot Cuav
کنترلرهای پرواز خلبان خودکار CUAV ارائه عملکرد صنعتی و سازگاری با سیستم...
-

کنترل کننده پرواز Iflight
کنترلرهای پرواز iFlight: کنترل دقیق برای هواپیماهای بدون سرنشین FPV iFlight پیشنهاد...
-

کنترل کننده پرواز GEPRC
کشف کنید کنترلر پرواز GEPRC مجموعه - سیستم های AIO و پشته...
-

کنترل کننده پرواز Boying
کاوش کنید کنترلر پرواز BOYING مجموعه، طراحی شده برای هواپیماهای بدون سرنشین...





-
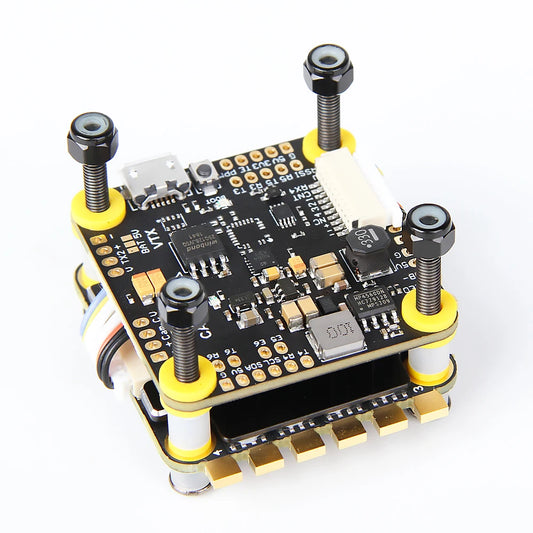
استک کنترلر پرواز SpeedyBee F405 V4 BLS 55A 30x30 FC&ESC
قیمت عادی از $49.00 USDقیمت عادیقیمت واحد مطابق -
پشته SpeedyBee F405 Mini BLS 35A 20x20
قیمت عادی از $62.00 USDقیمت عادیقیمت واحد مطابق -
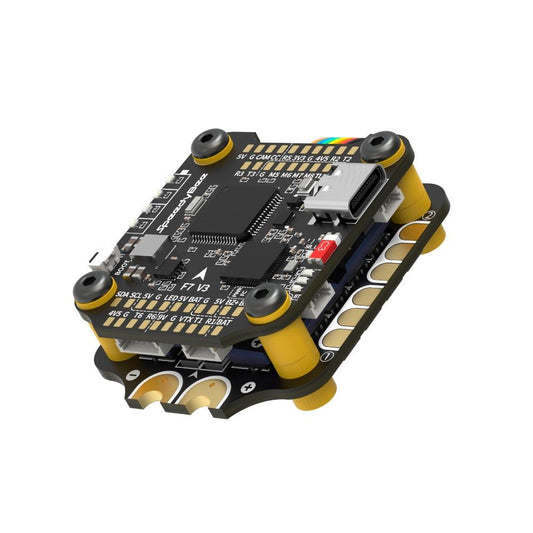
کنترلر پرواز SpeedyBee F7 V3
قیمت عادی $63.00 USDقیمت عادیقیمت واحد مطابق -
استک کنترلر پرواز SpeedyBee F405 V5 OX32 55A 30x30 مدل هواپیما با ESC 4 در 1، ژیروسکوپ ICM42688، STM32F405، تنظیم بیسیم و 16MB بلکباکس
قیمت عادی از $69.00 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز Mateksys H743-SLIM V4، با STM32H743، دو ICM42688P، DPS368، پشتیبانی ۲ تا ۸ سل، USB-C، OSD
قیمت عادی $129.00 USDقیمت عادیقیمت واحد مطابق$0.00 USDقیمت فروش $129.00 USD -
کنترلر پرواز SpeedyBee F405 AIO 40A Bluejay 25.5x25.5 3-6S
قیمت عادی $110.60 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز Foxeer F722 V4 Mini MPU6000
قیمت عادی $85.00 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز Matek Mateksys - مدل جدید 2022 H743-WING V3 H743 مناسب برای پهپادهای مسابقهای FPV و هواپیماهای بال ثابت
قیمت عادی $156.18 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز MATEK F405-WING-V2 برای هواپیمای بال ثابت - STM32F405، ICM42688-P، OSD، ۱۰ PWM
قیمت عادی $85.00 USDقیمت عادیقیمت واحد مطابق$0.00 USDقیمت فروش $85.00 USD -
SpeedyBee F7 V3 BL32 50A 30x30 Stack Blackbox Data Analyse iNAV Betaflight Emuflight Firmware Wireless Flasher
قیمت عادی از $65.40 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز Matek H743-SLIM با OSD - 5V BEC MPU6000 OSD داخلی بدون سنسور جریان برای مولتی کوپتر مولتی روتور RC Racing Drone
قیمت عادی $114.54 USDقیمت عادیقیمت واحد مطابق -

کنترلر پرواز AeroEggTech AET-H743-Basic H743 برای ArduPilot هواپیمای ثابت/عمودی، BEC 10 آمپر، دو IMU
قیمت عادی از $69.00 USDقیمت عادیقیمت واحد مطابق -
کنترل پرواز هلیکوپتر Flywing ACE نسخه ارتقا یافته FBL Gyro H1 با GPS داخلی M10 و قابلیت چرخش هماهنگ
قیمت عادی $239.00 USDقیمت عادیقیمت واحد مطابق -
پیکربندی SpeedyBee BT Nano 3 Wireless FC
قیمت عادی $19.00 USDقیمت عادیقیمت واحد مطابق -
MATEK H743-WLITE - کنترل پرواز Mateksys
قیمت عادی $139.39 USDقیمت عادیقیمت واحد مطابق -
کنترل پرواز هلیکوپتر Flywing H2 FBL ژیروسکوپ (نسخه ارتقا یافته H1) با GPS دوگانه، CAN Bus و تشخیص ولتاژ ۱۲S
قیمت عادی $379.00 USDقیمت عادیقیمت واحد مطابق -
Pixhawk PX4 PRO PIX 32 Bit Flight Controller Autopilot - با کوادکوپتر 4G SD RC Ardupilot ArduPlane ArduRover
قیمت عادی از $130.31 USDقیمت عادیقیمت واحد مطابق -
کمبو استک FPV هابیوینگ XRotor F7 FC + 65A 30x30mm 4 در 1 ESC، AM32، سازگار با DJI Plug & Play
قیمت عادی از $69.00 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز RadioLink F405 – ۳۲ بیتی STM32F405، خروجی ۶ کاناله، OSD داخلی، سازگار با ArduPilot/Betaflight/INAV
قیمت عادی از $39.00 USDقیمت عادیقیمت واحد مطابق -
Foxeer F722 V4 Flight Controller X8 DJI Type-C
قیمت عادی $62.00 USDقیمت عادیقیمت واحد مطابق -
Foxeer F722 V4 MPU6000 FC 8S Dual BEC Barometer X8 Flight Controller
قیمت عادی $85.00 USDقیمت عادیقیمت واحد مطابق -
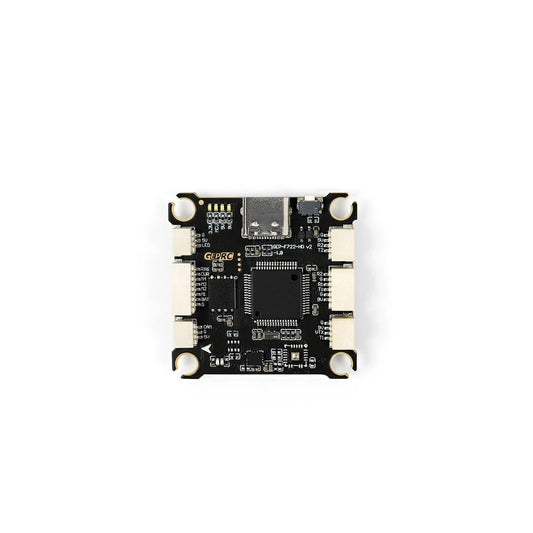
GEPRC GEP-F722-HD V2 Flight Controller 3-6S LiPo 16M Black Box ICM42688-P System RC FPV Racing Quadcopter Drone
قیمت عادی از $53.00 USDقیمت عادیقیمت واحد مطابق -
T-motor F7 HD Stack F7 HD Flight Controller for + F55A Pro II ESC for FPV RC Drone Freestyle Racing Quadcopter
قیمت عادی از $75.00 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز خودکار CUAV X25 EVO - STM32H7، سه IMU، دو بارومتر، RM3100، CAN، ۱۶ PWM، سازگار با PX4/ArduPilot
قیمت عادی از $446.00 USDقیمت عادیقیمت واحد مطابق -

کنترلر پرواز GEPRC TAKER F745 BT 60A – ژیروسکوپ دوگانه، ۵۱۲ مگابایت بلکباکس، بلوتوث، خروجی ۸ موتوره
قیمت عادی $112.00 USDقیمت عادیقیمت واحد مطابق -
Foxeer F405 V2 (Plug) Flight Controller + Reaper 55A ESC 8S Stack Video Switcher Servo Borameter
قیمت عادی از $65.00 USDقیمت عادیقیمت واحد مطابق -
Pixhawk PX4 PIX 2.4.8 32 Bit Flight Controller+RGB+OLED+Switch Safety+Buzzer+PPM+I2C+ 4G SD
قیمت عادی از $132.28 USDقیمت عادیقیمت واحد مطابق -
Pixhawk 2.4.8 PX4 PIX 32 Bit Flight Controller - M8N GPS / ماژول تله متری Wifi / سوئیچ ایمنی Buzzer RGB I2C 4G SD OSD / OLED
قیمت عادی از $10.96 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز APM2.8 APM 2.8 Ardupilot + M8N GPS داخلی قطب نما + پایه GPS + ضربه گیر برای مولتی کوپتر کوادکوپتر RC
قیمت عادی از $104.90 USDقیمت عادیقیمت واحد مطابق -
CUAV NEW X7+ Flight Controller NEO 3 Pro GPS Pixhawk منبع باز PX4 ArduPilot GNSS FPV RC Drone VTOL کوادکوپتر Combo
قیمت عادی از $407.11 USDقیمت عادیقیمت واحد مطابق -
JIYI K++ Flight Control - رادار اجتناب از موانع اختیاری CPU دوگانه پهپاد کشاورزی ویژه
قیمت عادی از $49.27 USDقیمت عادیقیمت واحد مطابق -
Matek System H743 / MINI H743 Flight Controller - STM32H743VIT6 ICM20602 OSD DPS310 PDB داخلی برای قطعات هواپیماهای بدون سرنشین مسابقه ای FPV RC
قیمت عادی $116.02 USDقیمت عادیقیمت واحد مطابق -
کنترلر جدید BaseCam Simplebgc 32 Bit Extended Brushless Gimbal نسخه 3.6 با رمزگذار برای دوربین 5D2 5D3 BMCC
قیمت عادی $312.17 USDقیمت عادیقیمت واحد مطابق -
استک GEPRC TAKER H743 BT 32Bit 65A - STM32H743، ژیروسکوپ دوگانه، تنظیم بلوتوث، جعبه سیاه ۵۱۲ مگ
قیمت عادی از $94.00 USDقیمت عادیقیمت واحد مطابق -
کنترلر پرواز CUAV X25 EVO Pixhawk – سازگار با PX4 / ArduPilot، هسته سیستم پهپاد نسل جدید
قیمت عادی از $446.00 USDقیمت عادیقیمت واحد مطابق -
استک GEPRC TAKER F722 BLS 80A V2 – کنترلر پرواز STM32F722 به همراه ESC چهار در یک 80 آمپر برای کوادکوپترهای FPV حرفهای 3 تا 6 سل
قیمت عادی $155.00 USDقیمت عادیقیمت واحد مطابق