کنترلر پرواز خودکار Holybro Pixhawk 6X Pro
کنترلر پرواز خودکار Holybro Pixhawk 6X Pro
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
نقطه طراحی کلیدی
- IMU صنعتی با کارایی بالا ADIS16470 با محدوده دینامیکی شتاب سنج بالا (40±) g)، مناسب برای سنجش حرکت دقیق در برنامه های کاربردی پهپاد
- همه مواد جدید عایق لرزش بادوام پیشرفته با فرکانس تشدید در طیف بالاتر، ایده آل برای کاربردهای پهپادهای صنعتی و تجاری
- IMU اضافی سه گانه و فشارسنج اضافی دوگانه در اتوبوس های جداگانه
- پردازنده STM32H753 با کارایی بالا
- کنترلر پرواز مدولار: سیستم IMU، FMU و Base مجزا
- طراحی مبتنی بر ایمنی، حسگرهایی از تولیدکنندگان مختلف و خط تولید مدل را در خود جای داده است
- LDO مستقل هر سنسور را با کنترل توان مستقل تغذیه می کند.
- رابط اترنت برای یکپارچه سازی کامپیوتر ماموریت با سرعت بالا. بدون ترانسفورماتور می توان با استفاده از مقاومت های پایانی 50 اهم در دستگاه مورد نظر به دست آورد (پایانه 50 اهم AN2190).
- برد IMU با کنترل دما، اجازه می دهد تا دمای کار بهینه IMU ها را فراهم کند
- حالت سیگنال 3.3 ولت یا 5 ولت قابل تعویض سخت افزاری (نیاز به اصلاح برد پایه دارد)
توجه:
- ماژول FC + یک تخته قرنیز برای عملکرد این محصول مورد نیاز است. یک ماژول FC یا یک پایه به خودی خود کار نمی کند.
مشخصات
پردازنده ها و حسگرها
- پردازنده FMU: STM32H753
- 32 بیت Arm® Cortex®-M7، 480 مگاهرتز، حافظه فلش 2 مگابایت، رم 1 مگابایت
- پردازنده IO: STM32F103
- 32 بیت Arm® Cortex®-M3، 72 مگاهرتز، 64 کیلوبایت SRAM
- سنسورهای روی برد
- Accel/Gyro: ADIS16470
- ± 40 گرم، ارتعاش ایزوله، IMU صنعتی
- Accel/Gyro: IIM-42652
- ± 16 گرم، ارتعاش ایزوله، IMU صنعتی
- Accel/Gyro: ICM-45686 با فناوری BalancedGyro™
- ± 32 گرم، سخت نصب شده
- فشارسنج: ICP20100
- فشارسنج: BMP388
- ماگ: BMM150
- Accel/Gyro: ADIS16470
- NXP عنصر امن سخت افزاری EdgeLock SE050 Plug & Trust
داده های الکتریکی
- رتبه بندی ولتاژ:
- حداکثر ولتاژ ورودی: 6 ولت
- ورودی برق USB: 4.75 ~ 5.25 ولت
- ورودی سروو ریل: 0~36 ولت
- رتبه های فعلی:
- محدود کننده جریان خروجی Telem1: 1.5A
- تمام پورت های دیگر محدود کننده جریان خروجی ترکیبی: 1.5A
- دمای کارکرد: -25-85 درجه سانتیگراد
داده های مکانیکی
- ابعاد
- ماژول کنترل پرواز: 38.8 x 31.8 x 30.1 میلی متر
- پایه استاندارد: 52.4 x 102 x 16.7 میلی متر (آلومینیوم)
- مینی پایه: 43.4 x 72.8 x 14.2 میلی متر
- وزن
- ماژول کنترل پرواز: 50 گرم
- پایه استاندارد: 72.5 گرم (آلومینیوم)
- مینی پایه: 26.5 گرم
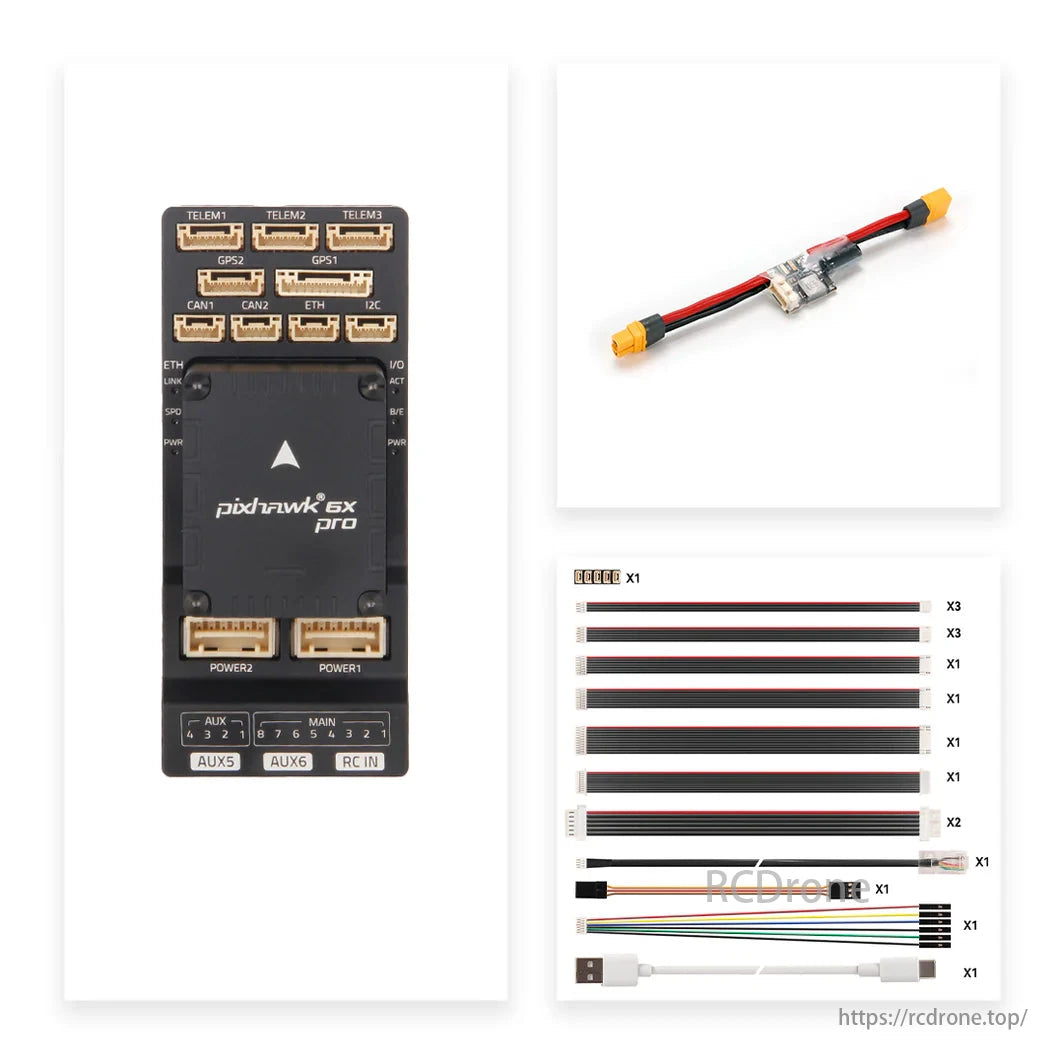
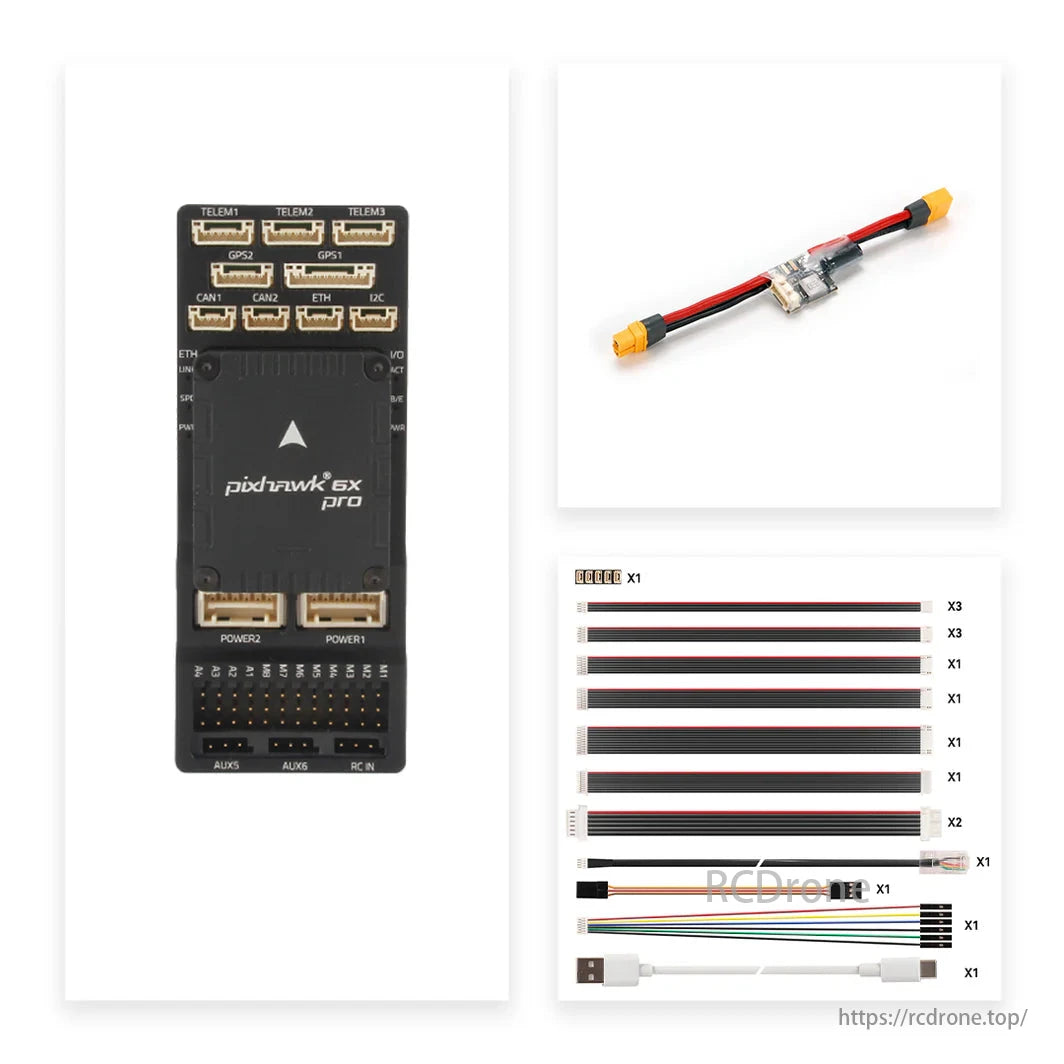
بسته شامل
ماژول FC فقط شامل موارد زیر است:
- Pixhawk ماژول کنترل پرواز 6X Pro
- جایگزینی میرایی IMU اختیاری (نرم تر از از پیش نصب شده)
مجموعه استاندارد V2A/V2B/Mini شامل:
- ماژول کنترل پرواز Pixhawk 6X Pro
- Pixhawk Standard Baseboard v2A/ Pixhawk Standard Baseboard v2B/ مینی پایه
- ماژول برق PM02D HV
- مجموعه کابل
جزئیات
تمام طراحی جدید جداسازی ارتعاش
این طراحی جدید جداسازی ارتعاش از ac استفاده می کندمواد عایق بادوام مبتنی بر سیلیکون با فرمول استاندارد به جای طرح سنتی فوم. ببا استفاده از تحقیق و توسعه و آزمایش گسترده، ویژگیهای میرایی بهینه IMU را با فرکانس تشدید در طیف بالاتر ارائه میکند که برای پهپادهای صنعتی و تجاری مناسب است.
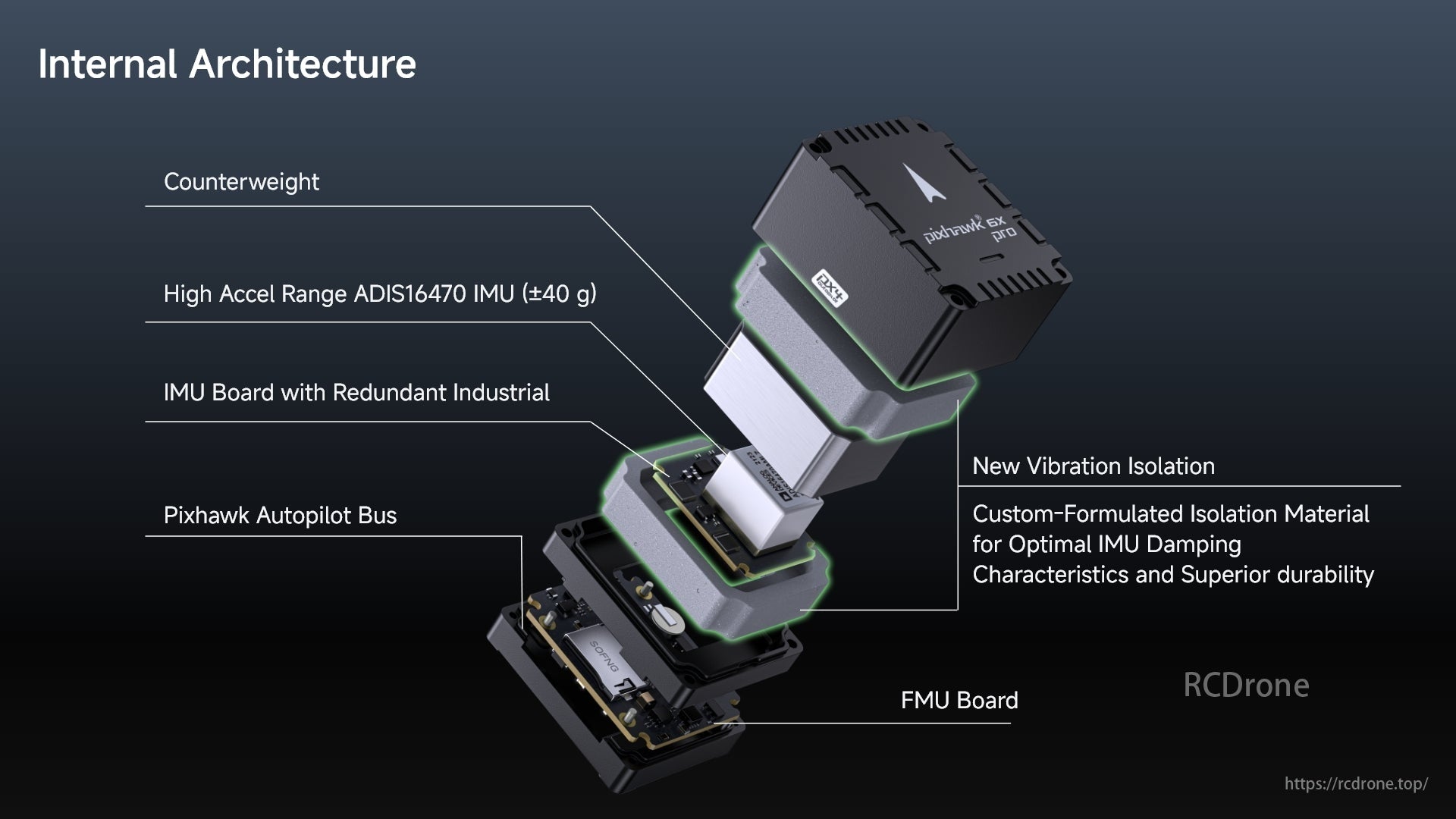
معماری داخلی: وزن متقابل، شتاب بالا ADIS16470 IMU (±40 گرم)، برد IMU صنعتی اضافی، اتوبوس خودکار Pixhawk، جداسازی ارتعاش جدید، برد FMU.
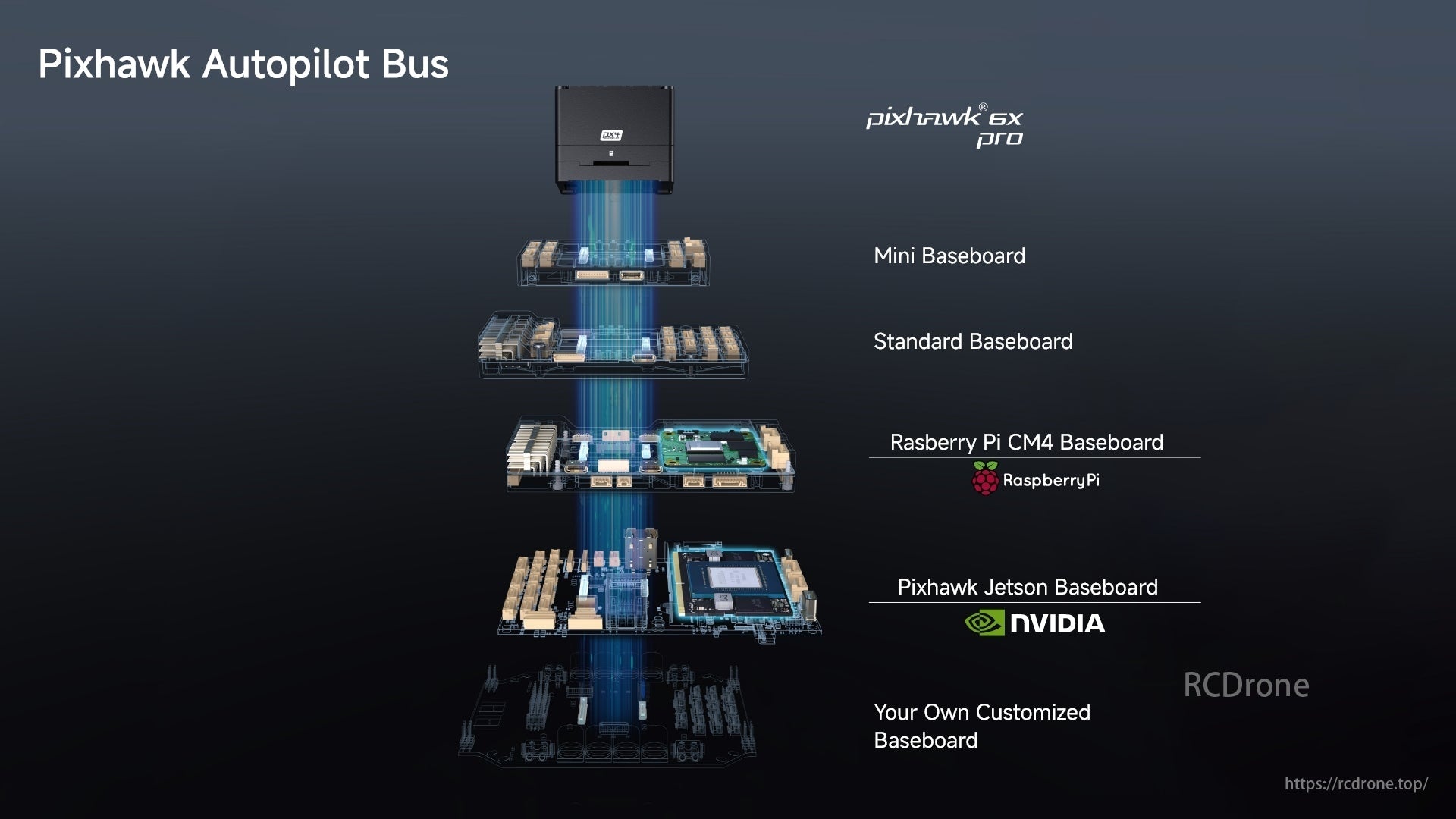
Pixhawk Autopilot Bus Mini، Standard، Raspberry Pi CM4، Jetson Baseboards و قرنیزهای سفارشی را به هم متصل می کند.
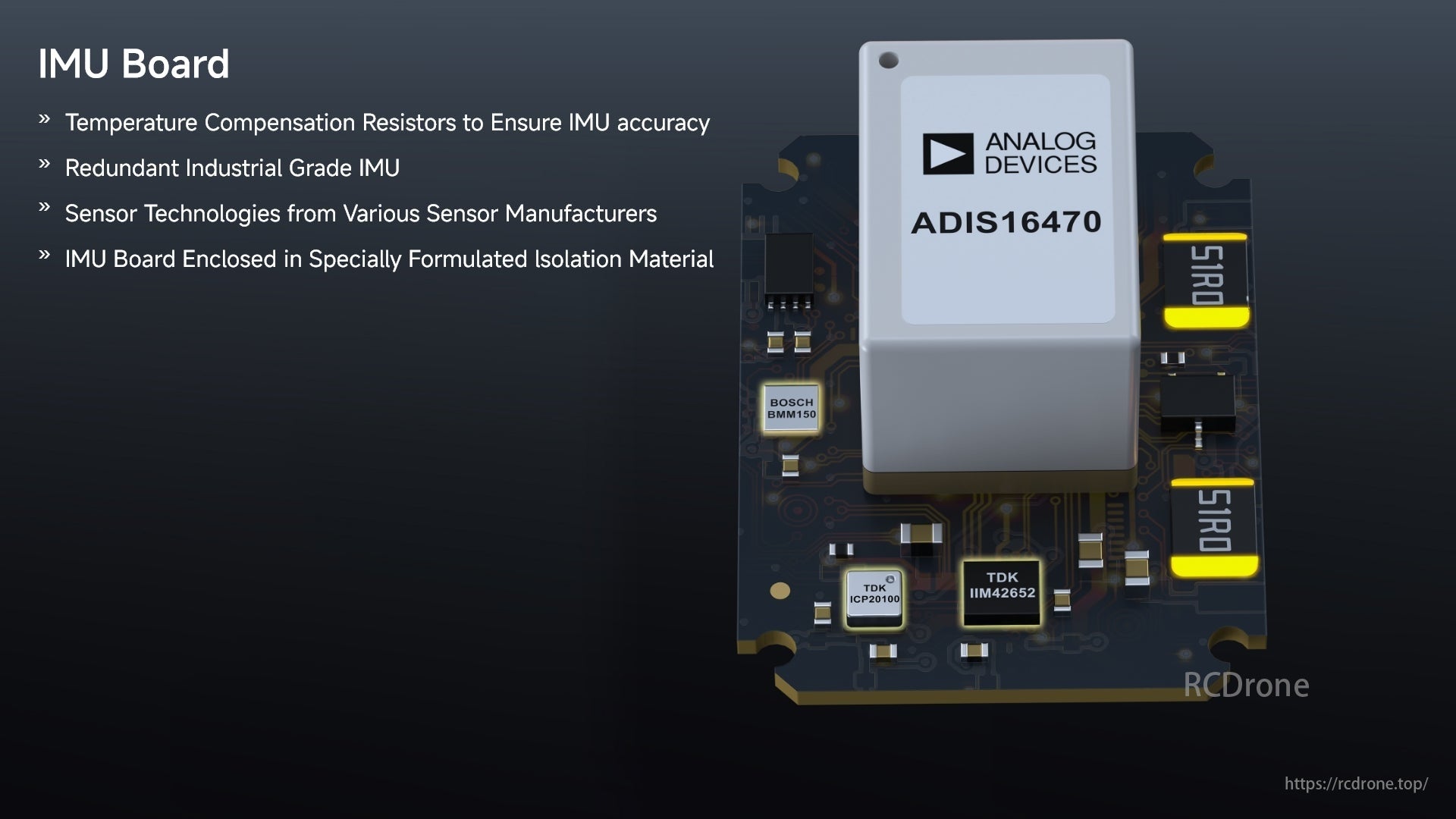
برد IMU دارای مقاومت های جبران کننده دما، IMU درجه صنعتی اضافی، سنسورهای تولید کنندگان مختلف است و در مواد ایزوله محصور شده است.
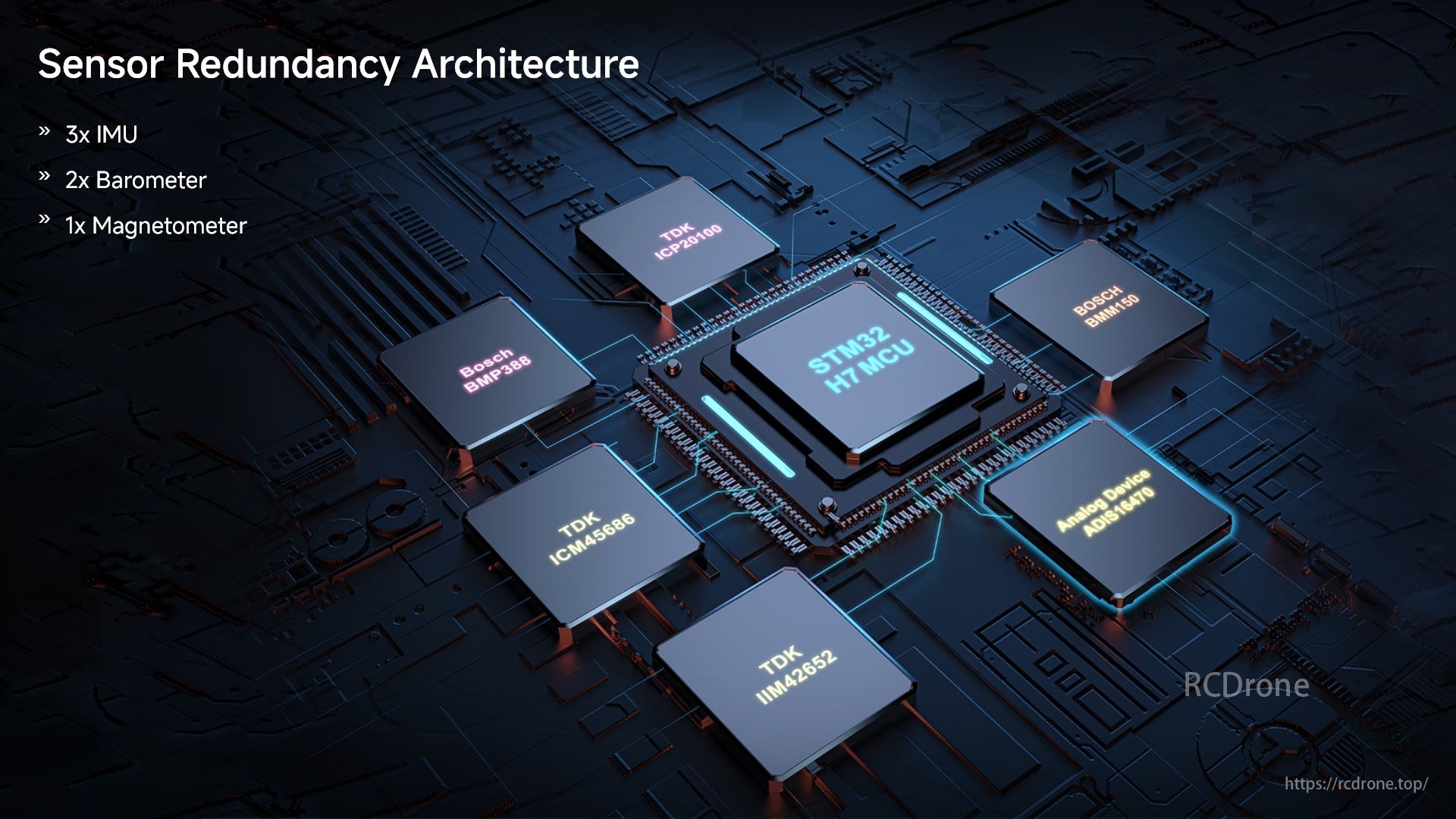
معماری افزونگی حسگر شامل 3x IMU، 2x بارومتر، و 1x مغناطیس سنج، دارای اجزایی مانند STM32 H7 MCU، IC های TDK، Bosch BMP388، و دستگاه های آنالوگ ADIS16470 است.
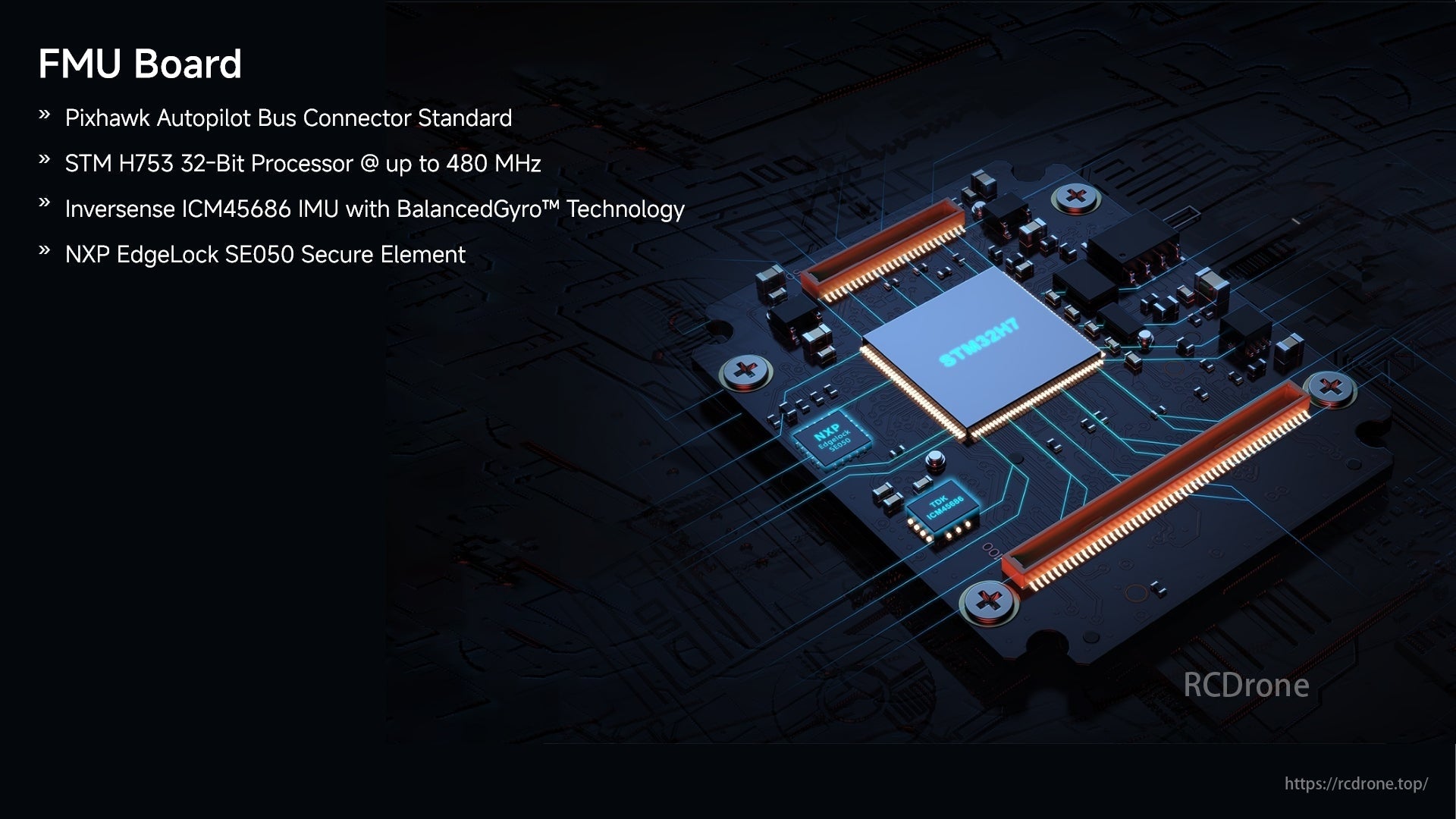
برد FMU دارای استاندارد اتصال اتوبوس خودکار Pixhawk، پردازنده 32 بیتی STM H753 تا فرکانس 480 مگاهرتز، Inversense ICM45686 IMU با فناوری BalancedGyro و عنصر امن NXP EdgeLock SE050 است.
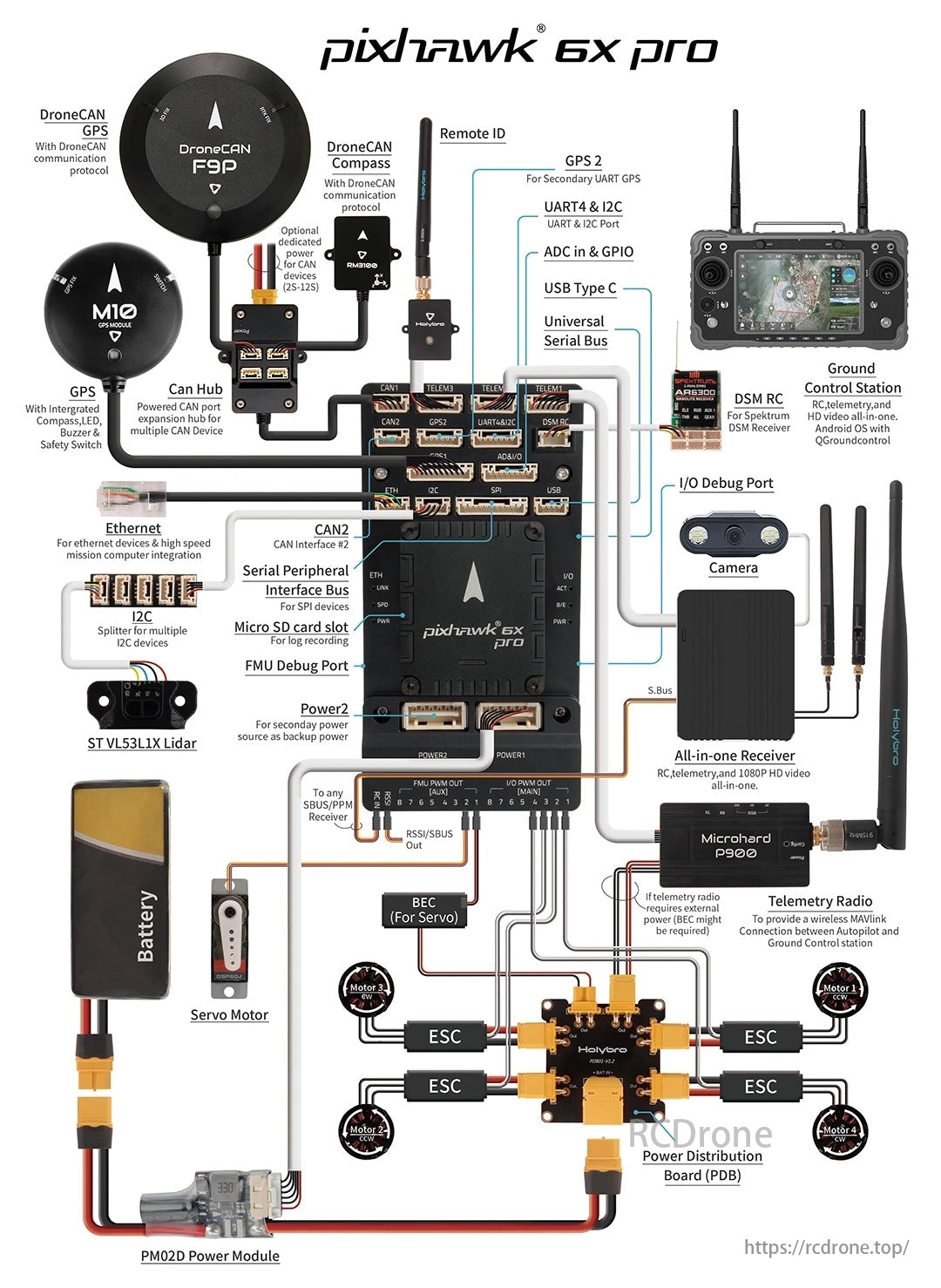
نمودار Pixhawk 6X Pro اتصالات سیستم خلبان خودکار یک پهپاد را نشان می دهد، از جمله ماژول های GPS، قطب نما، ایستگاه کنترل زمینی، دوربین، رادیو تله متری، ESC ها، موتورها و برد توزیع نیرو. رابط های مختلفی مانند CAN، I2C، UART و USB برای ارتباط بین اجزا استفاده می شود.
Related Collections