-
CUAV V5 + Carrier Board Pilote automatique Pixhawk Contrôleur de vol - FPV RC Drone Quadcopter Hélicoptère VTOL
Prix habituel $192.64 USDPrix habituelPrix unitaire par -
CUAV nouveau contrôleur de vol de pilote automatique V5 +-base sur le matériel Open source FMU V5 pour FPV RC Drone quadrirotor hélicoptère Pixhawk
Prix habituel À partir de $554.59 USDPrix habituelPrix unitaire par -
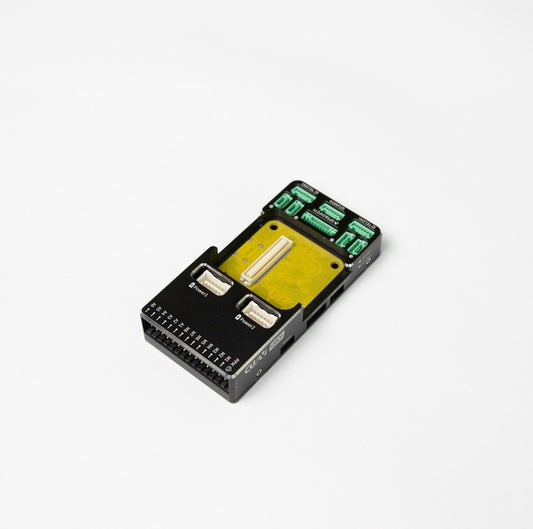
Carte de base CUAV V5+/X7+ pour contrôleur de vol, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Prix habituel À partir de $208.60 USDPrix habituelPrix unitaire par -
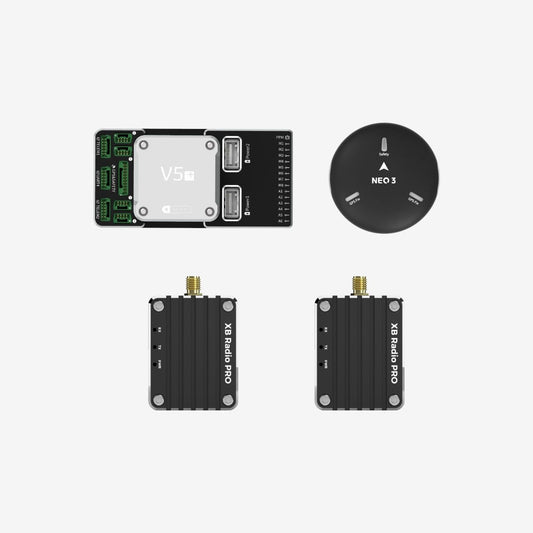
CUAV nouveau paquet d'hélicoptère multi-rotor assorti-contrôleur de vol pilote automatique V5 + NEO 3 GPS et ensemble de télémétrie XBEE Pro
Prix habituel $1,066.02 USDPrix habituelPrix unitaire par -
Données radio CUAV P9 et drone Pixhawk Fpv V5 + contrôleur de vol NEO 3 Pro GPS télémétrie Combo
Prix habituel $1,645.35 USDPrix habituelPrix unitaire par -
CUAV nouveau paquet une à plusieurs étoiles avec Flightcase V5 + RTK 9Ps GPS et Kit combiné de radiotélémétrie P900
Prix habituel $5,056.40 USDPrix habituelPrix unitaire par -
CUAV nouveau un à Multiple avec V5 + contrôleur de vol RTK 9Ps GPS P9 Kit de radiotélémétrie GNSS
Prix habituel $3,832.45 USDPrix habituelPrix unitaire par -

Drone CUAV Pixhawk Fpv V5 + contrôleur de vol NEO 3 Pro GPS et Module SKYE à Tube de vitesse combiné
Prix habituel $1,105.22 USDPrix habituelPrix unitaire par -
CUAV nouveau Pixhack Pixhawk V5 + pilote automatique-FPV RC Drone quadrirotor hélicoptère contrôleur de vol et NEO V2 3 Pro GPS Combo
Prix habituel À partir de $616.54 USDPrix habituelPrix unitaire par -
CUAV VTOL Rc Drone Pixhawk pilote automatique V5 + paquet de carte de support de base avec GPS NEO 3 et Combo de télémétrie P9
Prix habituel $1,869.14 USDPrix habituelPrix unitaire par -
Drone CUAV Pixhawk Fpv V5 + contrôleur de vol NEO 3 Pro GPS et module CAN Power PMU Combo
Prix habituel $1,057.20 USDPrix habituelPrix unitaire par -
Carte de support de pilote automatique CUAV CAN PDB V5 + Plus Core-contrôleur de vol pour Drone RC Pixhawk
Prix habituel $826.81 USDPrix habituelPrix unitaire par -
CUAV – nouveau Drone UAV FPV V5 +, pilote automatique, contrôleur de vol Pixhawk avec Module Lidar Radar TF Luna
Prix habituel $657.82 USDPrix habituelPrix unitaire par -
CUAV nouveau V5 + conception matérielle Pixhack Pixhawk pilote automatique télécommande de vol FPV RC Drone quadrirotor hélicoptère Transport
Prix habituel $408.00 USDPrix habituelPrix unitaire par