




OddityRC Vortex F80 80A 3-8S ESC Simple (AM32/HF32) Brushless, AT32F421, BEC 5V 3A, Télémétrie
OddityRC Vortex F80 80A 3-8S ESC Simple (AM32/HF32) Brushless, AT32F421, BEC 5V 3A, Télémétrie
OddityRC
Prix habituel
$31.59 USD
Prix habituel
Prix promotionnel
$31.59 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Aperçu
Le OddityRC Vortex F80 est un ESC unique de 80A pour moteurs sans balais (BLDC) de 3-8S, avec des options de firmware AM32 ou HF32. En général, le firmware AM32 est meilleur pour les crawlers, tandis que le HF32 est meilleur pour les avions et les multirotors—veuillez sélectionner selon vos besoins.
Caractéristiques clés
- Conception matérielle OddityRC avec un PCB à 6 couches et une épaisseur de cuivre de 3oz (intérieur et extérieur)
- Conception MOS encapsulée en métal pour une performance thermique améliorée et une gestion de courant élevée
- MCU AT32F421 (fréquence principale jusqu'à 120MHz), noyau ARM Cortex-M4
- Support de télémétrie
- 5V 3A BEC
- Protocoles : DShot300, DShot600, PWM (HF32 ne prend pas en charge PWM), etc.
Spécifications
| Nom de l'article | OddityRC AM32/HF32 80A ESC sans balais |
| Firmware | AM32 / HF32 (optionnel) |
| Protocole | DShot300, DShot600, PWM (HF32 ne prend pas en charge PWM), etc. |
| Télémetrie | Support |
| BEC | 5V 3A |
| MCU | AT32F421 (jusqu'à 120MHz de vitesse de fonctionnement) |
| Noyau | ARM Cortex-M4 |
| Mémoire | Prend en charge jusqu'à 64 Ko de mémoire flash (Flash) et 16 Ko |
| Température de fonctionnement | -40 à 70°C |
| Courant continu | 80A |
| Courant de pointe | 90A (Instantané) |
| Puissance de crête | 2000W (Instantané) |
| Tension | 10.8V-33.Batterie LiPo 6V (3-8S) |
| Carte PCB | Carte à 6 couches avec une épaisseur de cuivre de 3oz à l'intérieur et à l'extérieur |
| Taille | 36,2 x 24,3mm |
| Couleur | Noir |
Options de firmware & Remarques
- AM32 est conçu spécifiquement pour les processeurs ARM 32 bits pour contrôler les moteurs BLDC, avec un démarrage rapide et fluide et un accélérateur linéaire.
- HF32 est conçu pour les ESC de moteur BLDC 32 bits visant des moteurs sans balais dans des multirotors haute performance.
- HF32 peut être flashé sur un ESC avec le firmware AM32, mais AM32 ne peut pas être flashé sur un ESC HF32.
Caractéristiques de l'AM32
- Fréquence PWM variable
- Mode de démarrage en onde sinusoïdale
Caractéristiques de l'HF32
- Protocole de signal numérique : DShot150, DShot300 et DShot600
- DShot bidirectionnel : télémétrie RPM
- Haute performance : faible interférence de communication
- Ramping PWM plus fluide
- Mélodies de démarrage de configuration utilisateur
- Nombreuses optimisations et corrections de bogues
Notes de câblage / broches
- Broche de signal S : signal de contrôle de fonctionnement de l'ESC ; protocole PWM/DSHOT ; peut être réglé en ligne à l'aide du contrôle de vol.
- La broche de flash du firmware est fournie pour le flashage du firmware.
- Un schéma de câblage est étiqueté “DIAGRAMME AM32 80A” et montre les connexions à un FC et LIPO 4-8S (étiquette du schéma), avec des étiquettes FC incluant S1, S2, S3, S4, 5V, GND, BAT .
Applications
Points à prendre en compte
- Lors de l'utilisation avec un courant élevé continu, assurez une bonne dissipation de la chaleur pour le contrôleur de vitesse électronique (ESC).
- Si l'ESC ne peut pas fonctionner après avoir réglé les paramètres, réinitialisez les paramètres de l'ESC par défaut et ajustez les paramètres à nouveau.
Ce qui est inclus
- 1pcs AM32/HF32 firmware contrôleur de vitesse électronique (ESC) unique
- 1pcs dissipateur thermique en aluminium
- 2pcs condensateur électrolytique haute fréquence 35V 1000uf
- 1pcs cordon d'alimentation avec prise XT60
- 1pcs câble de signal
Manuels / Ressources
- Wiki AM32 : https://github.com/AlkaMotors/AM32-MultiRotor-ESC-firmware/wiki/Crawler-Hardware-and-AM32
- Site Web HF32 : https://hf32.neutron-rc.com/
- HF32 GitHub : https://github.com/ICpachong/HF32
Pour la sélection de produits, l'aide au câblage ou le support après-vente, contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected].
Détails

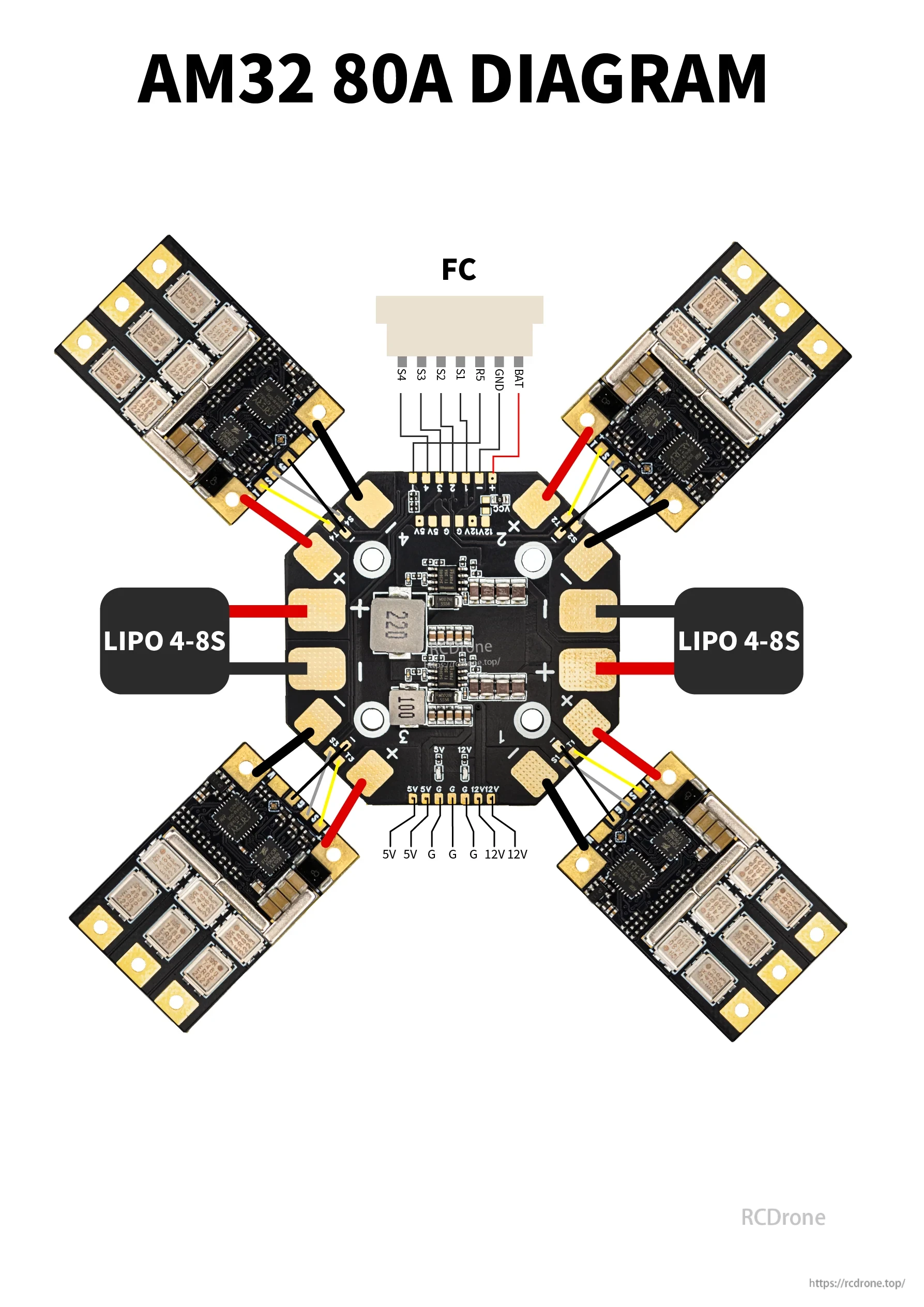
Schéma de câblage clair pour connecter plusieurs ESCs uniques à un contrôleur de vol, avec alimentation LiPo 4–8S et routage de signal/masse.
Related Collections






