

















SteadyWin GIM3505-8 Moteur à réduction planétaire intégré — Module d’articulation pour robot quadrupède, engrenage 8:1, 24V, CAN, IP54
SteadyWin GIM3505-8 Moteur à réduction planétaire intégré — Module d’articulation pour robot quadrupède, engrenage 8:1, 24V, CAN, IP54
SteadyWin
Impossible de charger la disponibilité du service de retrait
Aperçu
Le module de joint de robot quadrupède GIM3505-8 avec moteur à réduction planétaire intégré est conçu pour des joints robotiques compacts et des ensembles d'actionneurs. Le GIM3505-8 intègre un réducteur planétaire 8:1 avec un moteur sans balais et des options de pilote embarqué pour offrir un mouvement contrôlé pour les robots quadrupèdes, les bras robotiques, les joints humanoïdes et des systèmes mécatroniques similaires.
Caractéristiques clés
- Système d'engrenage planétaire avancé pour un faible jeu et un mouvement fluide (jeu d'engrenage : 15 arcmin).
- Large adaptabilité de tension : tension nominale de 24 V avec une plage de fonctionnement de 12~48 V.
- Densité de couple et efficacité élevées : constante de couple de 0,52 N·m/A avec un couple nominal de 0,65 N·m et un couple de pointe de 1,27 N·m.
- Empreinte compacte : Ø43 × 23,6 mm (sans pilote) ; Ø43 × 30 mm (avec pilote).
- Protections de sécurité intégrées : protections contre la surchauffe, la surtension et la surcharge (protection à triple couche indiquée dans la documentation produit).
- Interface de communication CAN ; prend en charge l'encodeur séparé et le frein personnalisé en option.
Spécifications
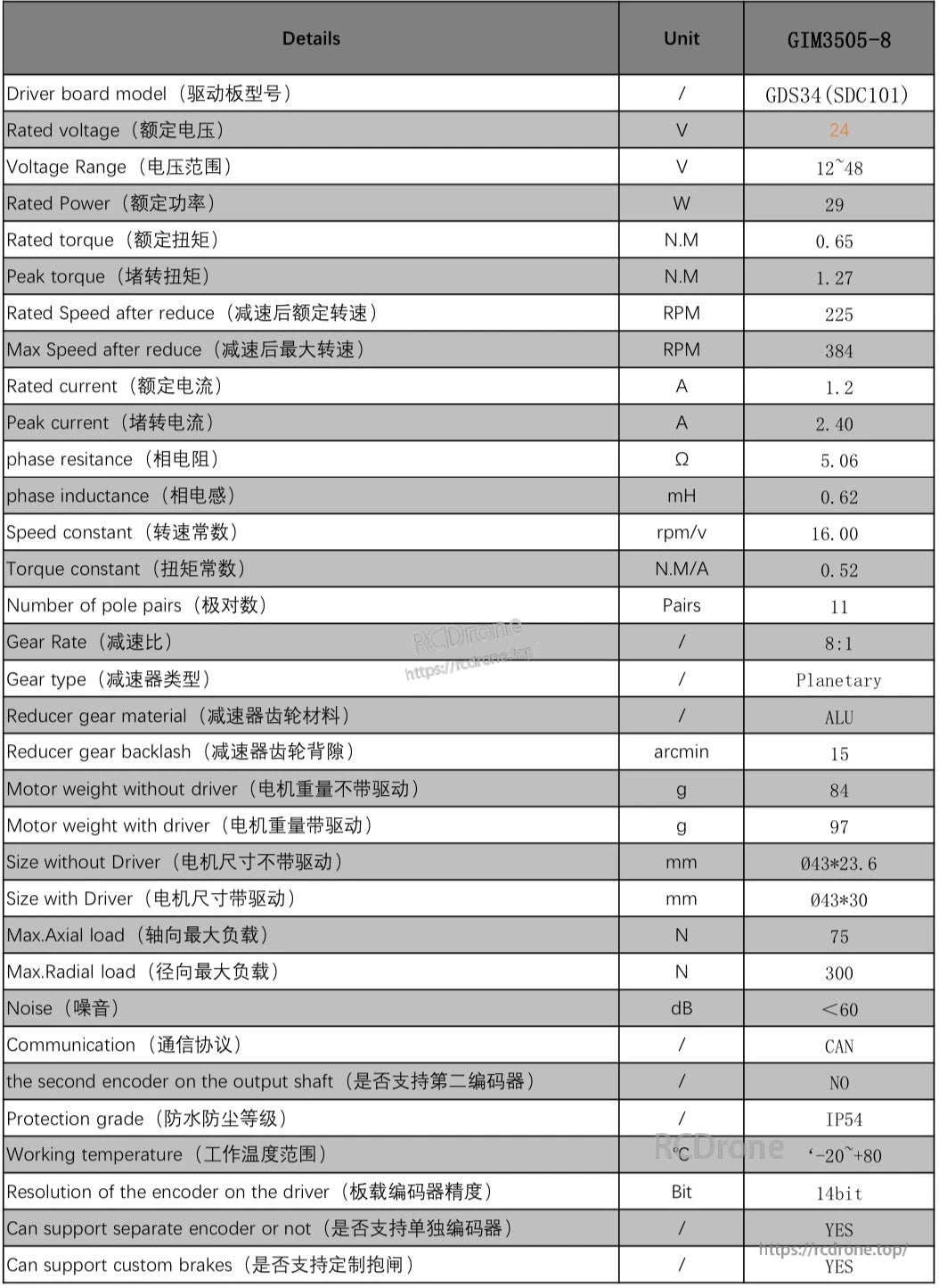
Paramètre Valeur ---------------------------------------- -------------------------- Modèle GIM3505-8 Modèle de carte de pilote GDS34 (SDC101) Tension nominale 24 V Plage de tension 12~48 V Puissance nominale 29 W Couple nominal 0.65 N·m Couple de pointe (blocage) 1.27 N·m Vitesse nominale après réduction 225 RPM Vitesse max après réduction 384 RPM Courant nominal 1.2 A Courant de pointe (blocage) 2.4 A Résistance de phase 5.06 Ω Inductance de phase 0.62 mH Constante de vitesse 16 rpm/V Constante de couple 0,52 N·m/A Nombre de paires de pôles 11 Paires Rapport de réduction 8:1 Type de réduction Planétaire Matériau de l'engrenage réducteur ALU Jeu de l'engrenage réducteur 15 arcmin Poids du moteur (sans driver) 84 g Poids du moteur (avec driver) 97 g Taille (sans driver) Ø43*23.6 mm Taille (avec moteur) Ø43*30 mm Charge axiale maximale 75 N Charge radiale maximale 300 N Bruit <60 dB Communication CAN Deuxième encodeur sur l'arbre de sortie NON Classe de protection IP54 Température de fonctionnement -20°C à +80°C Résolution de l'encodeur sur le moteur 14 Bit Support d'encodeur séparé OUI Support de frein personnalisé OUI
Applications
- Robots quadrupèdes (articulations et actionneurs de jambes)
- Articulations de robots humanoïdes
- Bras robotiques et manipulateurs
- Actionneurs d'exosquelettes
- Modules de direction et d'articulation AGV/AMR
- Projets de robotique autonome de recherche et universitaires
Pour le service client et les demandes techniques, contactez [email protected].
Manuels
- GlM3505-8_dessin_d'installation.pdf
- GlM3505-8_avec_dessin_d'installation_du_driver.pdf
- GIM3505-8.stp
Détails


SteadyWin spécifications du joint GIM3505-8 : 24V, 29W, couple de 0.65N.M, réducteur planétaire, communication CAN, indice de protection IP54, prend en charge des freins personnalisés et des encodeurs séparés, fonctionne de -20°C à +80°C.
Related Collections

















