




CEREBOTO OpenArm Kit Bras Robotique 7DOF – DIY ou Pré-assemblé, Contrôle Open-Source ROS/Python
CEREBOTO OpenArm Kit Bras Robotique 7DOF – DIY ou Pré-assemblé, Contrôle Open-Source ROS/Python
CEREBOTO
Impossible de charger la disponibilité du service de retrait
Aperçu
Le bras robotique CEREBOTO OpenArm 7DOF est un bras robotique de recherche, à échelle humaine, conçu pour les universités, les laboratoires, les startups et les makers sérieux. Avec 7 degrés de liberté, une portée de bras de 633 mm, une charge utile typique de 4,1 kg et une charge utile maximale de 6,0 kg par bras, OpenArm offre un mouvement de haute précision, une interaction physique sécurisée et des outils open-source riches.
Vous pouvez choisir un kit matériel DIY pour un assemblage complet, ou un bras fini, calibré en usine et prêt à l'emploi. Des configurations à bras simple, double et quadruple sont disponibles.
Caractéristiques clés
-
Bras robotique à échelle humaine 7DOF – conçu pour correspondre à une longueur de bras humain de 160 à 165 cm pour une manipulation naturelle et une téléopération.
-
Haute charge utile &et stabilité – charge utile typique de 4,1 kg, charge utile maximale de 6,0 kg par bras, avec un poids de bras léger de 5,5 kg.
-
Moteurs rétropropulsifs &et structure conforme – interaction sûre et fluide pour la collaboration homme-robot et les tâches contrôlées par force.
-
Boucle de contrôle CAN-FD à 1 kHz – contrôle en temps réel, à faible latence pour des applications de recherche haute performance et de qualité industrielle.
-
Construction entièrement métallique – structure principale robuste en alliage d'aluminium et en acier inoxydable pour la rigidité et la durabilité.
-
Matériel &et logiciel open-source – CAD, PCB, firmware et logiciel de contrôle ouverts pour une personnalisation approfondie.
-
Support ROS, Python et C++ – intégration officielle de ROS plus API Python/C++ pour un développement rapide d'algorithmes.
-
Écosystème riche et expansion – prend en charge des mains robotiques agiles, des gants de capture de mouvement et des bases mobiles pour des plateformes robotiques complètes.
Spécifications techniques
-
Degrés de liberté : 7 DOF par bras
-
Portée du bras : 633 mm
-
Charge utile typique : 4,1 kg
-
Charge utile maximale : 6,0 kg par bras
-
Poids du bras : environ 5.5 kg par bras
-
Matériaux : pièces structurelles en alliage d'aluminium et en acier inoxydable
-
Interface de contrôle : CAN / CAN-FD, UART (via l'adaptateur USB2CANFD-X2 inclus sur les versions à bras double/quatre)
-
Fréquence de contrôle : jusqu'à 1 kHz boucle CAN-FD
-
Support logiciel : cadre ROS, API Python, API C++
-
Ergonomie : longueur de bras adaptée aux utilisateurs mesurant 160–165 cm de hauteur
Logiciel &et écosystème open-source
OpenArm est une plateforme de bras robotique entièrement open-source.Les ressources officielles incluent :
-
Site web : openarm.dev
-
Documentation : docs.openarm.dev
-
GitHub : github.com/enactic/openarm
-
Vidéo tutoriel : guide officiel YouTube pour commencer
Avec des fichiers CAD, PCB et firmware ouverts, vous pouvez modifier la mécanique, l'électronique et le logiciel de contrôle, ou étendre le bras avec de nouveaux capteurs et effecteurs pour vos propres sujets de recherche.
Scénarios d'application typiques
OpenArm est conçu comme une plateforme de recherche et d'enseignement polyvalente et de haute précision pour :
-
Cours de robotique universitaire et expériences en laboratoire
-
Instituts de recherche et projets de laboratoire
-
Recherche en apprentissage par renforcement et en IA basée sur la physique
-
Interaction homme-robot et études sur les robots collaboratifs
-
Espaces de création et équipes de matériel open-source
-
Plateformes d'éducation et de formation en ingénierie
Avec sa taille à l'échelle humaine et son actionnement conforme, OpenArm est idéal pour la manipulation, la téléopération, l'apprentissage par imitation, la robotique d'assistance et plus encore.
Versions de produit &et configurations
Version 1 – Kit matériel DIY
-
Pour les utilisateurs ayant de fortes compétences pratiques qui souhaitent comprendre en profondeur la structure mécanique.
-
Comprend toutes les pièces mécaniques, électriques et imprimées en 3D ; vous assemblez et calibrez le bras vous-même en suivant le manuel.
Version 2 – Bras robotique fini
-
Pour les instituts de recherche, les laboratoires, les entreprises et les éducateurs qui ont besoin d'une plateforme prête à l'emploi.
-
Entièrement assemblé, réglé et calibré avant expédition ; prêt à l'emploi dès la sortie de la boîte.
Configurations de bras disponibles (selon l'annonce) :
-
Kit DIY – Bras simple
-
Bras fini – Bras simple
-
Kit DIY – Bras doubles
-
Bras finis – Bras doubles
-
Kit DIY – Bras quadruples
-
Bras finis – Bras quadruples
Contenu du paquet
Chaque kit OpenArm ou système fini comprend généralement :
-
Composants structurels principaux en alliage d'aluminium et en acier inoxydable
-
Moteurs, cartes de commande, alimentation et câbles
-
Pièces imprimées en 3D et ensembles de vis
Versions à double bras et à quatre bras : un dispositif USB2CANFD-X2 compatible avec la nomenclature officielle (CEREBOTO est l'agent domestique autorisé) pour la communication PC-CAN-FD.
Extensions matérielles prises en charge
OpenArm prend en charge plusieurs modules matériels (vendus séparément), vous permettant de construire un système robotique complet :
-
Main robotique habile – pour la manipulation fine et la recherche sur la préhension.
-
Ensemble de gants de capture de mouvement – pour la téléopération intuitive et l'apprentissage par imitation.
-
Base mobile – pour transformer OpenArm en une plateforme de manipulateur mobile.
FAQ
Q : Le bras robotique peut-il être utilisé immédiatement ?
A : La version finie du bras est entièrement réglée et calibrée en usine—il suffit de l'allumer et de commencer à travailler. Le kit matériel DIY nécessite que vous assembliez et configuriez le système en suivant les instructions.
Q : OpenArm est-il compatible avec ROS ou d'autres middleware ?
A : Oui. OpenArm prend officiellement en charge le cadre ROS, et vous pouvez également contrôler le bras via des API Python et C++.
Q : Pour qui ce produit est-il destiné ?
A : Chercheurs universitaires et d'instituts, laboratoires d'IA & de robotique, cours d'enseignement, centres de formation en ingénierie et passionnés avancés.
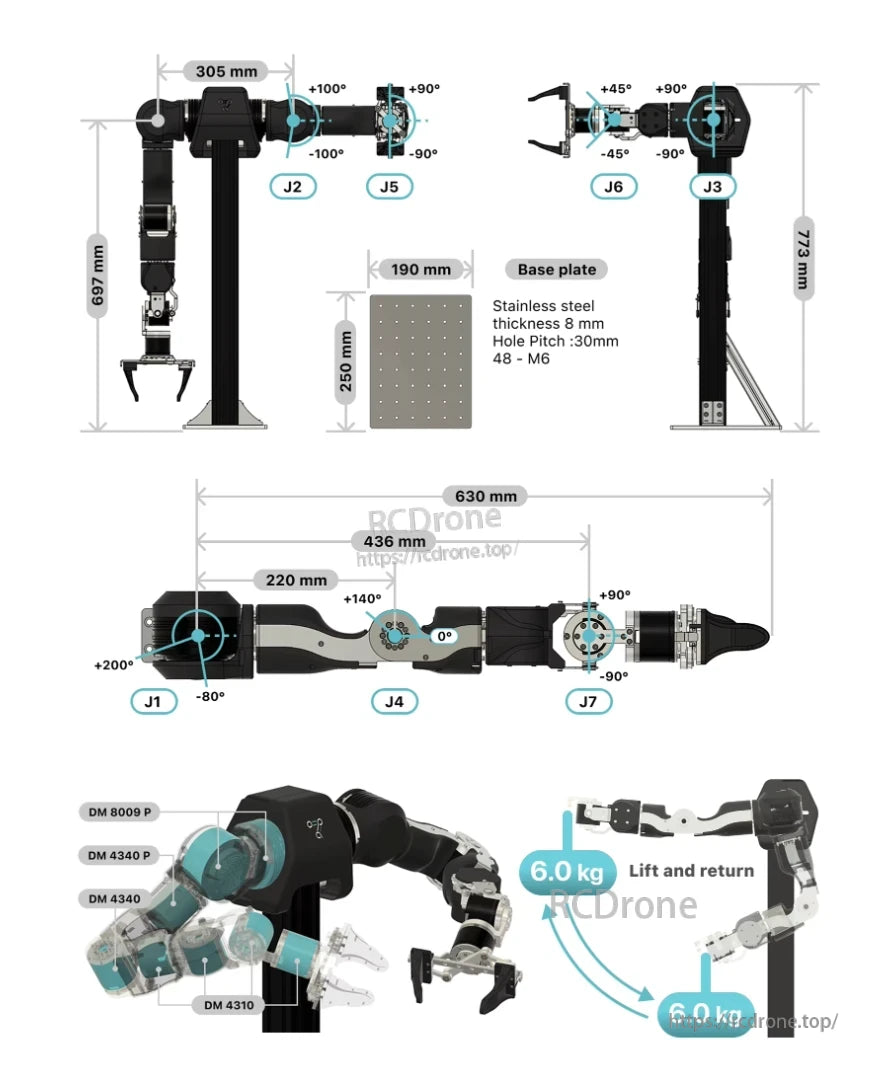
Le bras robotique Cereboto OpenArm 7DOF a sept articulations (J1–J7) avec des plages angulaires définies. Il mesure 697 mm ou 773 mm de hauteur, atteint 630 mm et se monte sur une plaque de base en acier inoxydable de 190×250 mm—épaisseur de 8 mm avec 48 trous M6 espacés de 30 mm. Propulsé par des moteurs DM8009P, DM4340P, DM4340 et DM4310, il gère des charges utiles de 6,0 kg avec précision. Conçu pour un usage industriel et de recherche, il équilibre robustesse structurelle et contrôle de mouvement précis.

Related Collections



