






Contrôleur de drone CUAV Pixhawk V6X V2 pour PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100 Mbps
Contrôleur de drone CUAV Pixhawk V6X V2 pour PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100 Mbps
CUAV
Impossible de charger la disponibilité du service de retrait
Aperçu
Le CUAV Pixhawk V6X V2 est un contrôleur de drone de la série Pixhawk conçu pour les firmwares d'autopilote PX4 et ArduPilot. Il suit la norme FMU v6x de Pixhawk et la philosophie de conception modulaire, avec des capteurs redondants de qualité industrielle améliorés, une horloge externe à température constante et un design de dissipation de chaleur pour le MCU, un commutateur de niveau PWM 5V/3.3V, et une structure d'absorption des chocs brevetée. Le module de gestion de l'alimentation PMU 2 Lite standard prend en charge 70V d'entrée et 220A de détection de courant.
Caractéristiques clés
- Unité de point flottant à double précision H7 (STM32H753IIK6); unité de point flottant à double précision de 480 MHz; mémoire Flash de 2 Mo
- Matrice IMU triple redondante dissemblable de qualité industrielle avec conception de bus et d'alimentation indépendants (IIM-42652, BMI088, ICM-45686)
- Baromètre à double redondance combiné (BMP581, ICP-20100)
- Système d'absorption des chocs central avec absorption des chocs à trois axes (X, Y, Z); conception de support à quatre coins inclinés; nouveau type de matériau absorbant les chocs
- Compas magnétique RM3100 de qualité automobile pour un rejet robuste des interférences magnétiques
- Compensation de l'horloge à cristal externe IMU (utilisé avec une horloge externe à température constante de haute précision pour réduire les erreurs ODR et améliorer la sensibilité et la synchronisation)
- Système de contrôle de température constante : silicone thermoconducteur et compensation de température IMU pour réduire la dérive liée à la température
- Logiciel flexible commutant entre 5V et 3.3V niveaux de sortie PWM
- Interface Ethernet intégrée de 100 Mbps pour la synchronisation de données à haute vitesse avec des dispositifs tels que des ordinateurs de mission et des caméras de levé
- Prend en charge le démarrage sécurisé et les services de mise à jour du firmware sécurisé
- Conception d'alimentation multi-redondante ; prend en charge l'entrée PMU CAN à 2 canaux ; inclut PMU 2 Lite en standard
- Des trous de montage en bas ont été ajoutés pour un montage direct par vis ; les trous de montage sont compatibles avec les vis standard M2
Spécifications
| Processeur | STM32H753IIK6 |
| Coprocesseur | STM32F103 |
| Version | Pixhawk V6XV2 |
| CPU / mémoire (déclaré) | Unité de traitement à virgule flottante double précision de 480 MHz ; 2 Mo de mémoire Flash |
| Accéléromètre & gyroscope | IIM-42652; BMI088; ICM-45686 |
| Boussole | RM3100 |
| Baromètre | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Niveau PWM | 3.3V / 5V (commutation logicielle) |
| Alimentation | 2 (2 interfaces d'alimentation CAN) |
| Port GPS | 2 (GPS1 : interface GPS avec I2C et interrupteur de sécurité ; GPS2 : interface avec I2C et GPS) |
| Port TELEM | 3 |
| Bus CAN | 2 |
| PPM RC | 1 (entrée dédiée pour récepteur PPM) |
| SBUS/DSM/RSSI | 2 (1 entrée SBUS/DSM/Spektrum ; 1 analogique 3.3V/PWM entrée) |
| Sorties SBUS | 1 |
| Débogage FMU | 1 |
| Débogage IO | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI externe 1 | 1 (interface SP16 pour l'expansion de capteur externe) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| Port USB | 2 (Type-C x1; interface GH x1 pour connexion USB externe) |
| Carte TF | 1 |
| Module d'alimentation | PMU standard 2 Lite (version 5V), tension d'entrée : 12-70V |
| Tension de fonctionnement | USB : 4.75-5.25V; PMU 2 Lite : 12-70V ; Puissance : 4.85-5.45V |
| Température de fonctionnement | -20 à 85C |
| Taille | 45 x 85.1 x 29.2 mm |
| Poids | Contrôleur : 97.9g ; Noyau : 43.1g ; Carte porteuse (y compris les vis) : 54.8g |
| Remarque de montage (texte du diagramme) | Les trous de montage sont compatibles avec les vis standard M2 ; dimensions indiquées : 72 mm ; 22.50 mm; 24 mm |
Ce qui est inclus
- Pixhawk V6X V2 x1
- Module d'alimentation CAN PMU 2 Lite 5V x1
- Câble d'alimentation à connecteur PMU 2 Lite-5V (Version X7+ (V6X)), longueur de fil : 25 cm x1
- Carte d'extension CAN/I2C x1
- Carte mémoire TF x1
- Câble Type-C, longueur de fil : 100 cm x1
- Câble DSM RC, longueur de fil : 30 cm x1
- Câble SBUS RC, longueur de fil : 30 cm x1
- Câble PPM RC/SBUS OUT, longueur de fil : 30 cm x1
- Câble Ethernet, longueur de fil : 40 cm x1
- Câble CAN, longueur de fil : 30 cm x1
- Câble TELEM, longueur de fil : 30 cm x1
- Câble UART 4, longueur de fil : 30 cm x1
- Câble UART4 -> Câble I2C, longueur de fil : 30 cm x1
- Câble ADIO, longueur de fil : 30 cm x1
- Câble de débogage, longueur de fil : 10 cm x1
- Câble d'extension de connecteur femelle USB -> Type-C, longueur de fil : 50 cm x1
- 3M Double-Face x2
Applications
- Compatible avec ArduPilot et PX4
- Prend en charge les multi-rotors, les avions à voilure fixe, les avions à décollage et atterrissage verticaux (VTOL), les hélicoptères sans pilote, les véhicules sans pilote et les navires sans pilote (submersibles)
- Synchronisation de données Ethernet haute vitesse avec des ordinateurs de mission et d'autres dispositifs embarqués où cela est pris en charge
Pour des vérifications de compatibilité et des questions de configuration, contactez [email protected] ou visitez https://rcdrone.top/.
Vidéo
Détails

Le contrôleur de vol Pixhawk V6X V2 utilise un processeur H7 et dispose d'une IMU triple redondante, d'un baromètre double et d'une boussole RM3100 avec un design d'absorption des chocs.

Le Pixhawk V6X V2 utilise un processeur STM32H753IIK6 H7 pour prendre en charge les configurations de contrôle de vol basées sur PX4 et ArduPilot.

Le Pixhawk V6X V2 utilise un support d'absorption des chocs à trois axes (X, Y, Z) avec quatre supports d'angle inclinés pour aider à réduire les vibrations et le bruit.
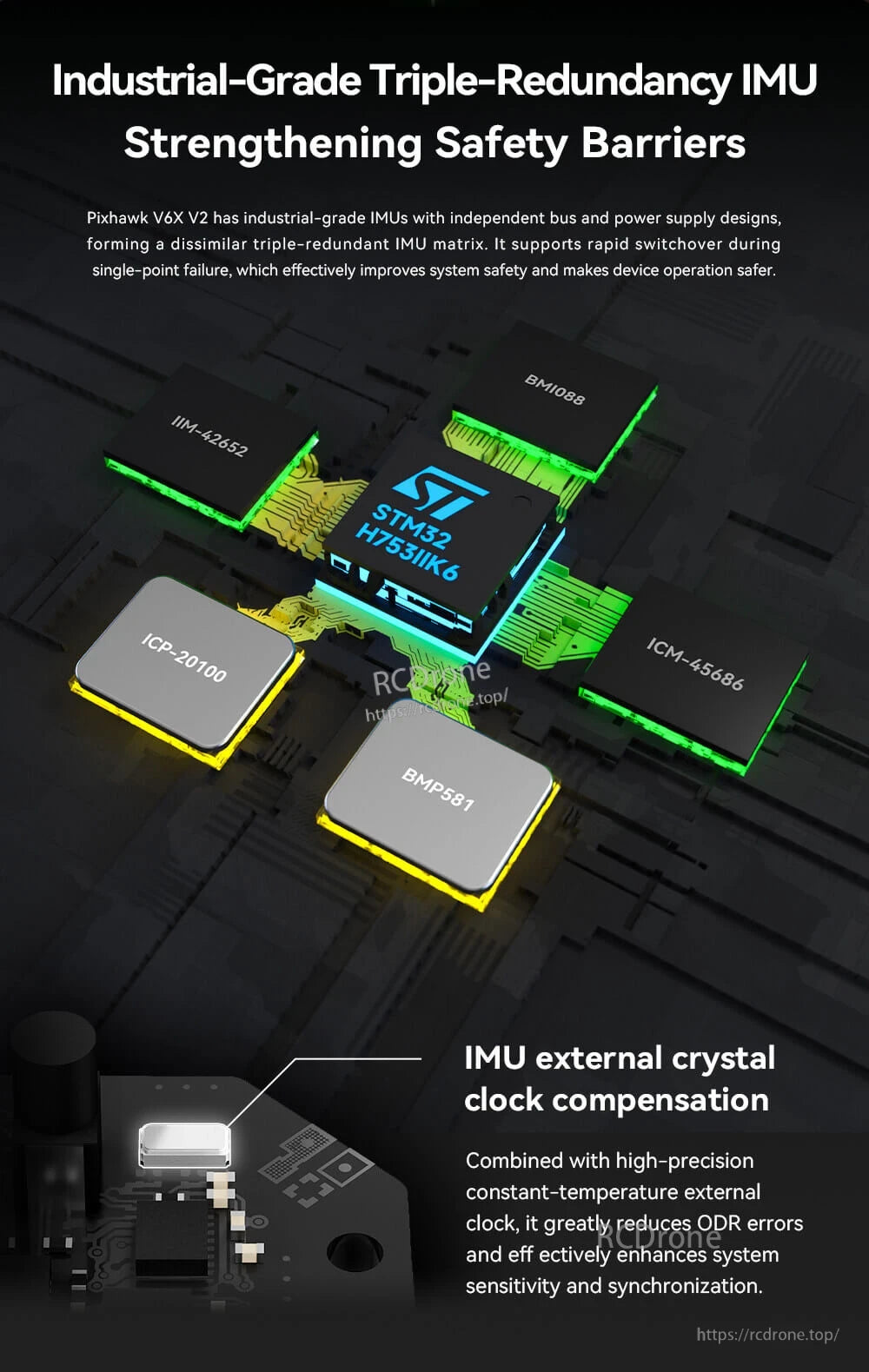
La conception du contrôleur de vol Pixhawk V6X V2 présente une configuration IMU triple redondante autour du STM32H753IIK6, plus une compensation de fréquence de cristal externe pour le timing des capteurs.

Le Pixhawk V6X V2 intègre un magnétomètre RM3100 de qualité automobile et prend en charge la détermination de l'orientation GPS pour une orientation et une navigation plus stables.
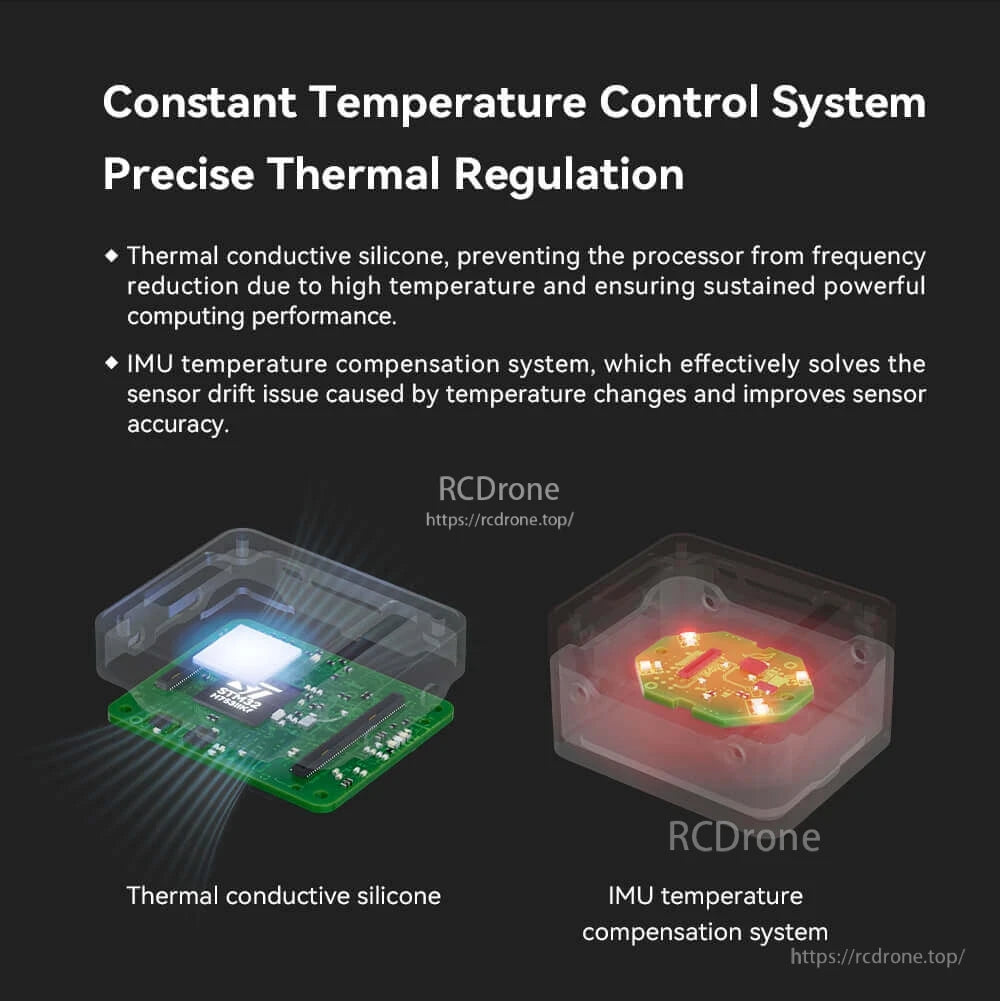
Un système de contrôle de température constant utilise du silicone thermoconducteur et une compensation de température IMU pour réduire la dérive liée à la température.
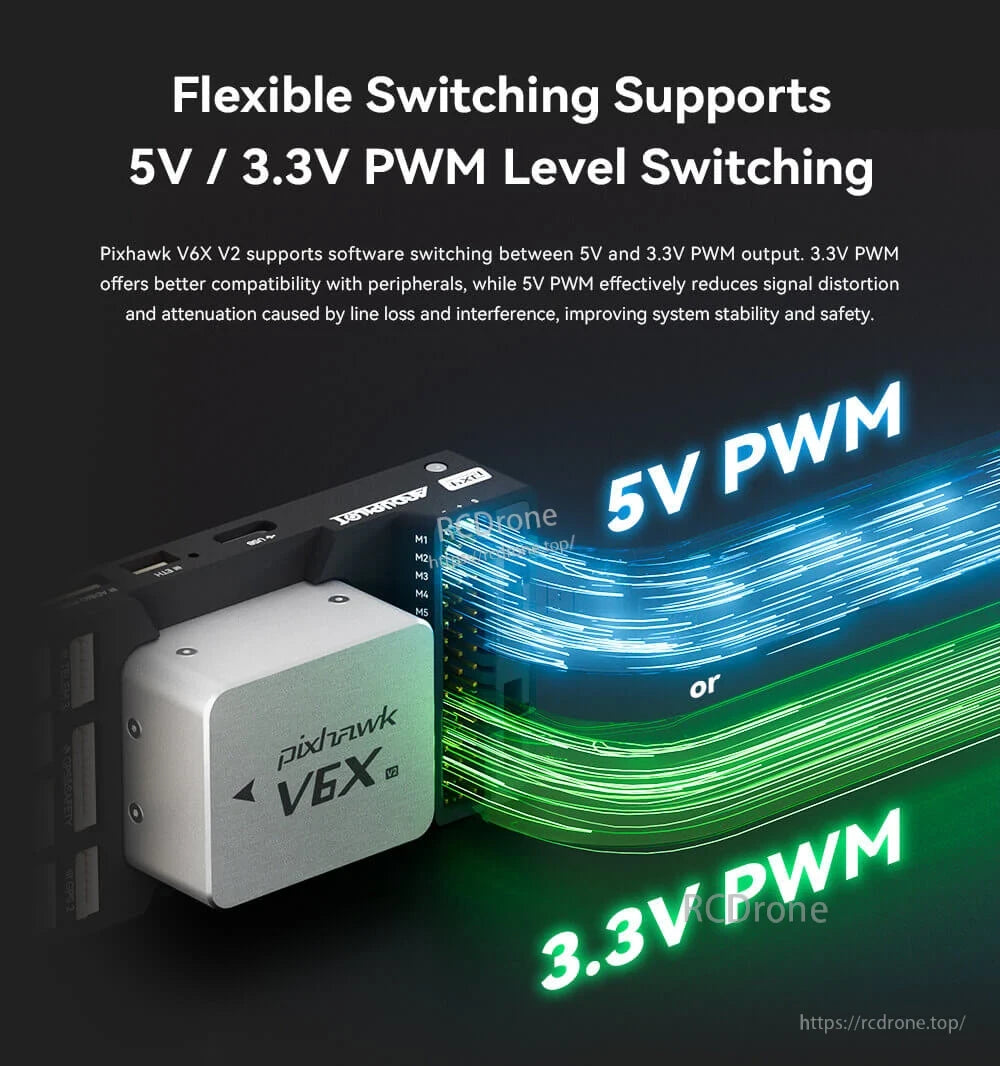
Le Pixhawk V6X V2 prend en charge un commutateur flexible entre les niveaux de sortie PWM de 5V et 3.3V pour une compatibilité plus facile avec différents périphériques.

Le Pixhawk V6X V2 intègre une interface Ethernet de 100 Mbps ainsi que des ports étiquetés comme USB, TELEM3, CAN et GPS & Sécurité pour un câblage propre.
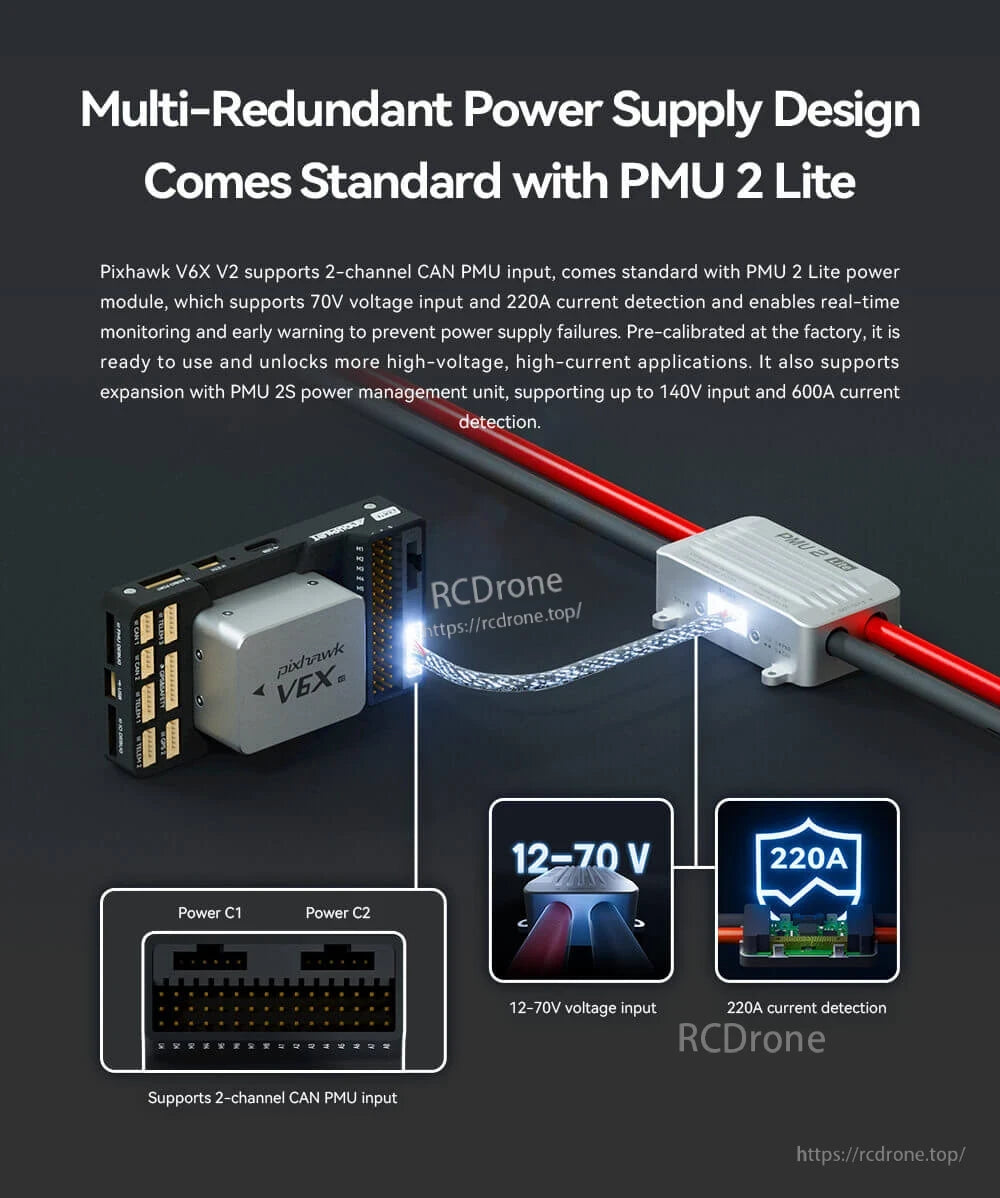
Le Pixhawk V6X V2 s'associe au module PMU 2 Lite pour une alimentation multi-redondante, prenant en charge 12–70V et la détection de courant de 220A.

Le CUAV Pixhawk V6X V2 utilise un module central modulaire et détachable sur une carte porte pour simplifier la personnalisation et l'accès aux connecteurs.
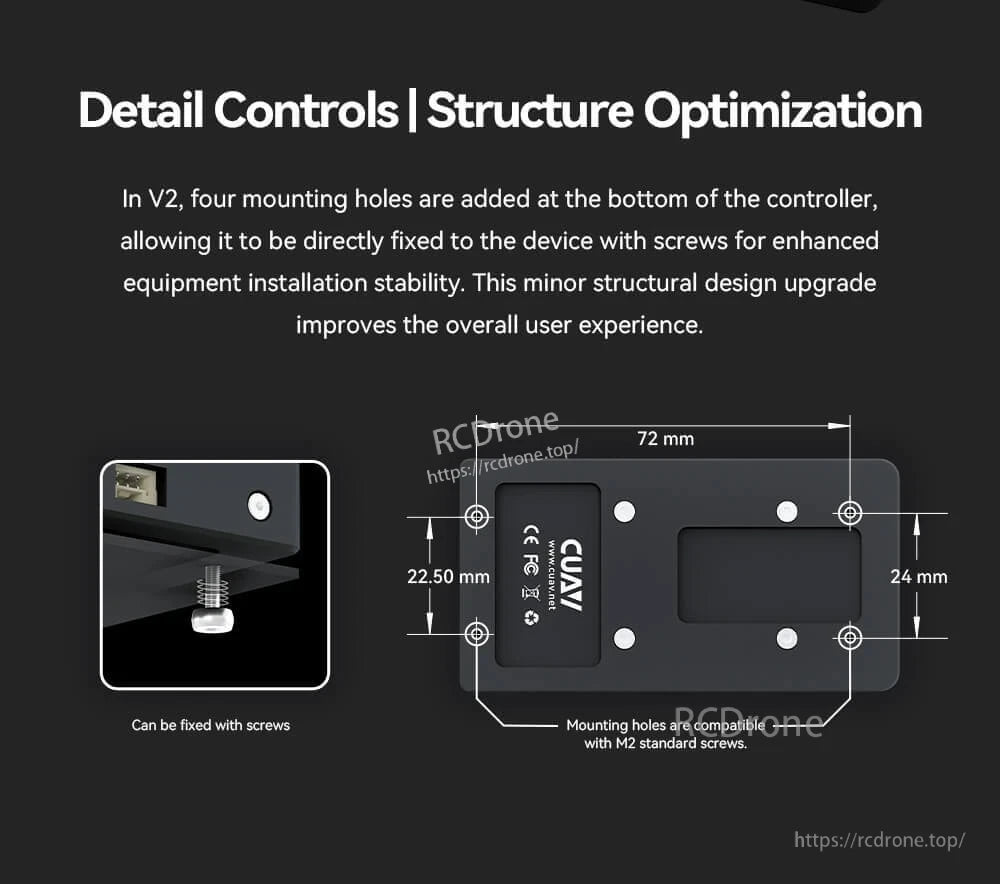
Le CUAV Pixhawk V6X V2 ajoute quatre trous de montage inférieurs compatibles M2 avec un empattement de 72 mm pour une installation par vis plus sécurisée.

Le Pixhawk V6X V2 prend en charge les firmwares ArduPilot et PX4 pour une gamme de plateformes sans pilote, y compris les multirotors, les avions à voilure fixe et les véhicules terrestres ou marins.
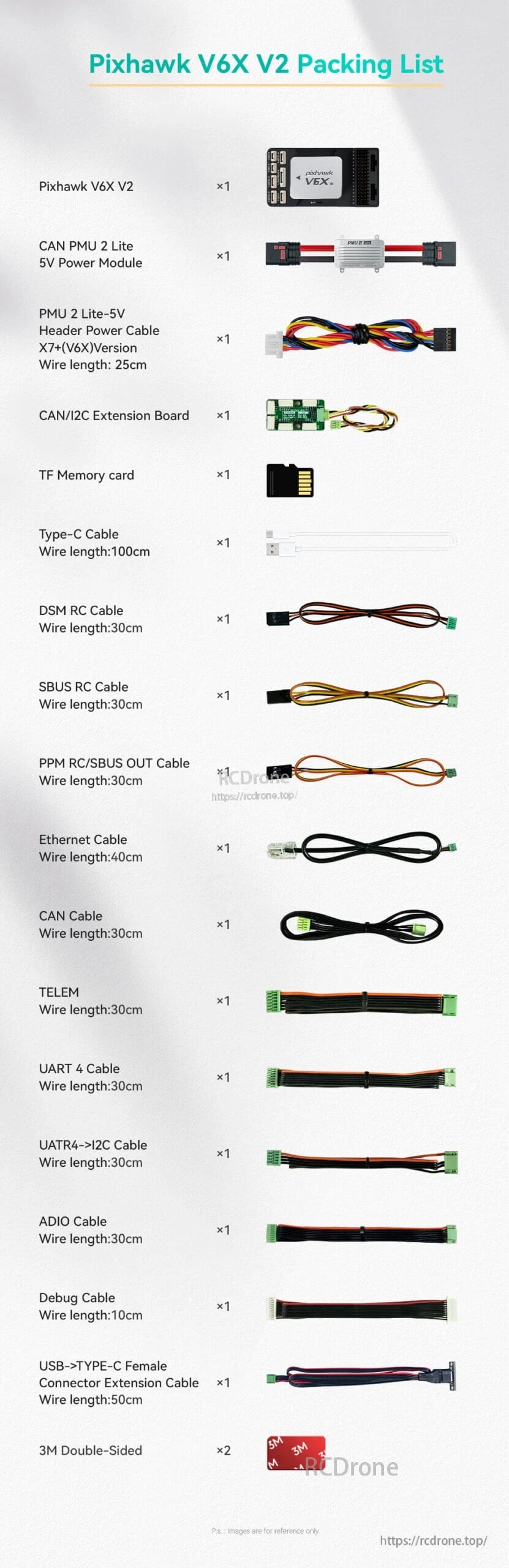
Le kit Pixhawk V6X V2 comprend le contrôleur de vol, le module d'alimentation CAN PMU 2 Lite 5V, la carte mémoire TF et un ensemble de câbles Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO et de débogage.
Related Collections


















