








CUAV X25 EVO Contrôleur de vol - STM32H7, Triple IMU, Double Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO Contrôleur de vol - STM32H7, Triple IMU, Double Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
Impossible de charger la disponibilité du service de retrait
Aperçu
CUAV X25 EVO est un contrôleur central à haute fiabilité pour systèmes sans pilote. Il combine un processeur STM32H7 (480 MHz, 2 Mo Flash) avec un ensemble IMU triple de qualité industrielle, des baromètres doubles et des magnétomètres RM3100. Une architecture d'alimentation redessinée prend en charge une entrée de 10 à 18 V et fournit jusqu'à 5 V/12 A de sortie externe pour alimenter des charges lourdes. Le contrôleur intègre une redondance d'alimentation à double chemin, une protection complète contre les ESD/surtensions, une indication d'état RGB et un design modulaire CORE/transport. Il est compatible avec ArduPilot et PX4, et convient aux multirotors, avions à voilure fixe, VTOL, hélicoptères, UGV/USV/UUV et autres plateformes.
Caractéristiques clés
-
Calcul haute performance : STM32H7 @ 480 MHz, 2 Mo Flash ; faible utilisation du CPU pour des algorithmes avancés (navigation non-GPS, filtres FFT, scripts LUA).
-
Suite de capteurs industriels:
-
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnétomètres: PNI RM3100 (anti-interférence).
-
Baromètres: TDK ICP20100 &et Bosch BMP581 (double).
-
Matrice IMU hétérogène avec commutation tolérante aux pannes.
-
-
Système de compensation de température double pour l'IMU : compensation en temps réel ±0.5 °C; par rapport à la génération précédente—15% de dérive de température en moins, 25% de meilleure cohérence de solution d'attitude.
-
Isolation des vibrations: amortissement en matrice de nylon symétrique incliné de 4ème génération ; isolateurs fixes externes optionnels pour supprimer les vibrations anormales à haute fréquence et améliorer la fidélité des données.
-
Architecture de puissance: DC-DC haute puissance embarqué 5 V/15 A; le port externe prend en charge une sortie 5 V/12 A; plage d'entrée 10–18 V.
-
Réseautage &et bus: bus CAN (batterie intelligente/ESC/servos, retour de télémétrie) + 100 M Ethernet.
-
Entrées/sorties abondantes: jusqu'à 16 PWM via les ports servo ; jusqu'à 32 PWM par le biais de l'expansion CAN.
-
Ruggedisation &et QA: redondance d'alimentation à double canal, protection ESD &et contre les surintensités, conception de connecteur anti-statique, revêtement conformal de PCB, et tests entièrement automatisés.
-
Indicateur de statut RGB : LED multicolores pour l'armement, l'alimentation, GNSS/position, modes de défaut, etc.
html
Spécifications
| Catégorie | Détails |
|---|---|
| Processeur | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 Mo Flash |
| Version | X25 EVO |
| IMUs | IIM-42653 ×2 (gyro ±4000 °/s; accel ±32 g); IIM-42652 ×1 (gyro ±2000 °/s; accel ±16 g) |
| Magnétomètre | RM3100 |
| Baromètres | TDK ICP20100 / Bosch BMP581 (double) |
| Sorties PWM | 16 (banque de servos M1–M16) |
| Entrées d'alimentation (CAN) | 2 |
| Ports GPS | 2 |
| Ports TELEM | 2 |
| UART4 | 1 |
| Entrée RC | 1 (PPM / SBUS / DSM etc.html ) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (total 5) |
| Expansion SPI6 | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Type-C |
| I²C | 3 |
| RSSI | 1 |
| Module d'alimentation | PMU 2 Lite |
Conditions d'exploitation &et Physique
| Article | Valeur |
|---|---|
| Tension d'entrée (contrôleur) | 10–18 V |
| USB | 4.75–5.25 V |
| Plage d'alimentation PMU 2 Lite | 20–70 V |
| Rail externe de 5 V | jusqu'à 12 A de sortie (pour périphériques/charges lourdes) |
| Température de fonctionnement | −20 °C à +85 °C |
| Dimensions | 76,5 × 45,45 × 32,2 mm |
| Poids | 110 g |
Interfaces &et points forts de la disposition
-
Rails DUAL POWER C1/C2, RC IN, Banc de servos M1–M16.
-
Connecteurs latéraux pour UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
-
CORE conçu qui peut être détaché pour le développement de carte porteuse personnalisée.
Compatibilité &et Applications
-
Firmware : entièrement compatible avec ArduPilot et PX4 (drivers &et fonctionnalités).
-
Véhicules : multirotors, ailes fixes, VTOL, hélicoptères, UGV, USV, UUV/sous-marin, et autres plateformes sans pilote.
Dans la boîte (Kit X25 EVO)
-
X25 EVO contrôleur de vol × 1
-
Module d'alimentation CAN PMU2 Lite (15 V) × 1
-
Carte d'extension CAN × 1
-
Câbles de données CAN (35 cm) × 2
-
Câble USB Type-C (100 cm) × 1
-
Câbles TELEM (30 cm) × 2
-
Câble RSSI (22 cm) × 1
-
Câble RC IN (30 cm) × 1
-
Câble d'alimentation du contrôleur intelligent CAN PMU2 Lite 15 V (30 cm) × 1
Détails

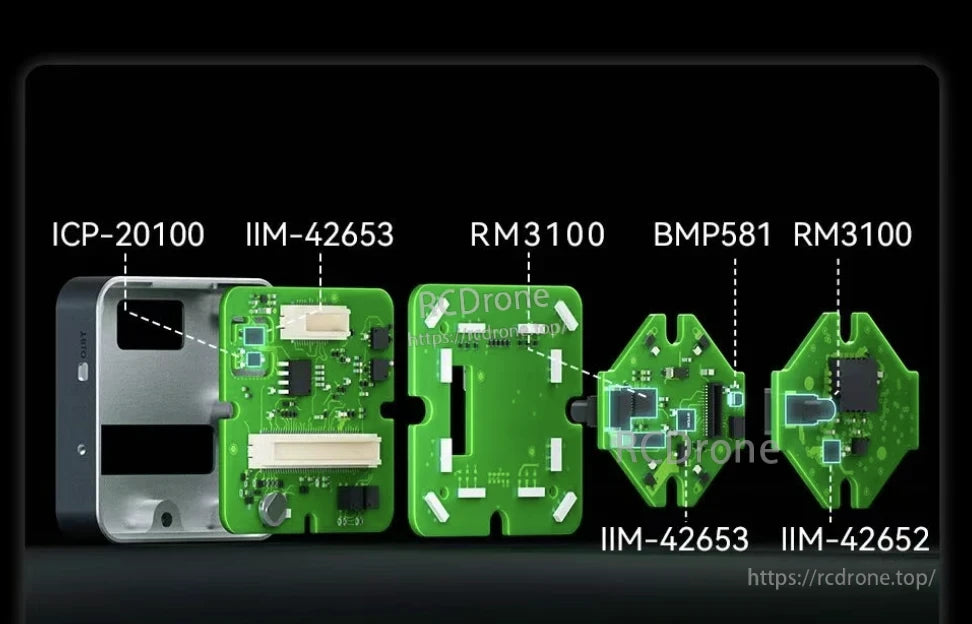
Composants du contrôleur de vol CUAV X25 EVO étiquetés avec des modèles de puces.


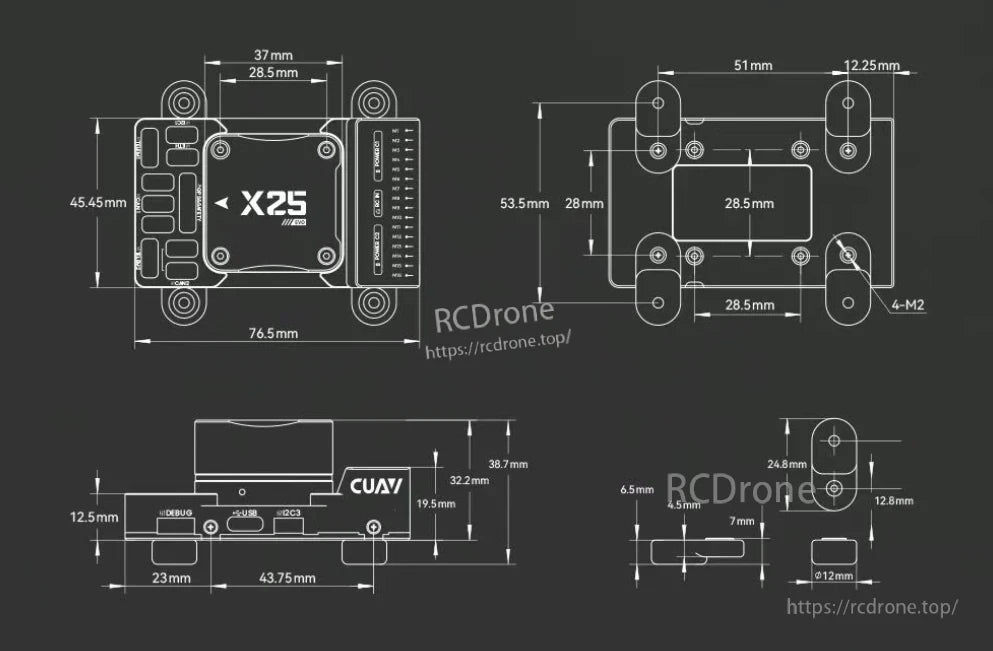
Le contrôleur de vol CUAV X25 EVO mesure 76,5 mm x 45,45 mm, dispose de ports de débogage, USB et I2C3, et comprend quatre vis M2 pour un montage sécurisé.

X25 EVO Autopilote comprend le contrôleur de vol, le module d'alimentation, la carte d'extension CAN, les câbles de données et de télémétrie, le câble Type-C, les fils RSSI et RC IN, et la ligne d'alimentation.
Related Collections








