






CubeMars AK10-9 V2.0 Actionneur Robotique KV60/KV100 | Couple nominal 18Nm/15Nm, Double encodeur, Modes MIT & Servo
CubeMars AK10-9 V2.0 Actionneur Robotique KV60/KV100 | Couple nominal 18Nm/15Nm, Double encodeur, Modes MIT & Servo
CubeMars
Impossible de charger la disponibilité du service de retrait
Vue d'ensemble
Le CubeMars AK10-9 V2.0 est un actionneur robotique hautement intégré qui combine un moteur BLDC haute performance, un réducteur planétaire, des encodeurs doubles, et un driver intégré en une unité compacte. Supportant à la fois le mode de puissance MIT et le mode de contrôle servo industriel, il offre un couple de sortie fluide, un positionnement précis, et une réponse rapide, ce qui le rend idéal pour des robots à pattes, des exosquelettes, et des AGV. Disponible en variantes KV60 et KV100, il offre jusqu'à 48Nm de couple de pointe, avec une dissipation thermique optimisée et un suivi de température en temps réel pour une fiabilité à long terme.
Caractéristiques clés
-
Modes de contrôle doubles : Prend en charge le passage sans couture entre le mode de puissance MIT et le mode de contrôle servo pour un contrôle de mouvement flexible.
-
Sortie de couple élevé: Jusqu'à 48Nm de couple maximal avec un fonctionnement stable et un faible jeu (0,33°).
-
Haute intégration: Combine moteur, encodeur, driver et réducteur planétaire dans un format compact.
-
Sortie & Encodeurs internes: Les encodeurs magnétiques intégrés internes 14 bits et externes 15 bits garantissent un retour d'information précis.
-
Roulements à rouleaux croisés: Améliore la résistance aux charges axiales et radiales, augmentant la fiabilité dans les applications dynamiques.
-
Capteur de température intégré: La surveillance de la température en temps réel prévient les dommages au moteur sous stress thermique.
-
Dissipation de chaleur optimisée: La conception unique de la structure améliore la gestion thermique, garantissant un fonctionnement stable à long terme.
-
Fonctionnement silencieux: Niveau de bruit aussi bas que 65 dB à 65 cm (version KV60).
Spécifications
Spécifications AK10-9 V2.0 K60
| Application | Robot à pattes, Exosquelette, AGV | Couple de pointe (Nm) | 48 |
| Mode de conduite | FOC | Courant de pointe (ADC) | 29.8 |
| Température ambiante de fonctionnement | -20℃~50℃ | Kv (tr/min/V) | 60 |
| Type de bobinage | étoile | Kt (Nm/A) | 0.198 |
| Classe d'isolation | C | Ke (V/krpm) | 17.2 |
| Isolation Haute tension | 1000V 5mA/2s | Résistance Phase à Phase (mΩ) | 195 |
| Résistance d'isolation | 1000V 10MΩ | Inductance Phase à Phase (μH) | 181 |
| Phase | 3 | Inertie (gcm²) | 1002 |
| Paires de pôles | 21 | Km (Nm/√W) | 0.45 |
| Rapport de réduction | 9:1 | Constante de temps mécanique (ms) | 0.5 |
| Couple de retour (Nm) | 0.8 | Constante de temps électrique (ms) | 0.93 |
| Jeu (°) | 0.33 | Poids (g) | 960 |
| Capteur de température | NTC MF51B 103F3950 | Rapport de couple maximal (Nm/kg) | 50 |
| Niveau de bruit dB à 65 cm du moteur | 65 | Connecteur CAN | A1257WR-S-4P |
| Capacités de charge de base (dyn. C ) N | 2000 | Connecteur UART | A1257WR-S-3P |
| Capacités de charge de base (stat.C0) N | 2520 | Connecteur d'alimentation | XT30PW-M |
| Tension nominale (V) | 24/48 | Type d'encodeur de boucle interne | Encodeur magnétique |
| Couple nominal (Nm) | 18 | Résolution de l'encodeur de bague interne | 14 bits |
| Vitesse nominale (tr/min) | 109/228 | Type d'encodeur de bague externe | Encodeur magnétique |
| Courant nominal (ADC) | 10.6 | Résolution de l'encodeur de bague externe | 15 bits |
AK10-9 V2.0 KV100 Spécifications
| Application | Robot à pattes, Exosquelette, AGV | Couple maximal (Nm) | 38 |
| Mode de conduite | FOC | Courant maximal (ADC) | 41.2 |
| Température ambiante de fonctionnement | -20℃~50℃ | Kv (tr/min/V) | 100 |
| Type de bobinage | Delta | Kt (Nm/A) | 0.114 |
| Classe d'isolation | C | Ke (V/krpm) | 9.9 |
| Isolation Haute tension | 1000V 5mA/2s | Résistance phase à phase (mΩ) | 65.5 |
| Résistance d'isolation | 1000V10MΩ | Inductance phase à phase (μH) | 60 |
| Phase | 3 | Inertie (gcm²) | 1002 |
| Paires de pôles | 21 | Km (Nm/√W) | 0.45 |
| Rapport de réduction | 9:1 | Constante de temps mécanique (ms) | 0.51 |
| Couple de retour (Nm) | 0.8 | Constante de temps électrique (ms) | 0.92 |
| Jeu (°) | 0.33 | Poids (g) | 960 |
| Capteur de température | NTC MF51B 103F3950 | Rapport de couple maximum par rapport au poids (Nm/kg) | 39.6 |
| Niveau de bruit dB à 65CM du moteur | 70 | Connecteur CAN | A1257WR-S-4P |
| Capacités de charge de base (dyn. C) N | 2000 | Connecteur UART | A1257WR-S-3P |
| Capacités de charge de base (stat.C0) N | 2520 | Connecteur d'alimentation | XT30PW-M |
| Tension nominale (V) | 24/48 | Type d'encodeur de boucle interne | Encodeur magnétique |
| Couple nominal (Nm) | 15 | Résolution de l'encodeur à anneau interne | 14 bits |
| Vitesse nominale (tr/min) | 205/421 | Type d'encodeur à anneau externe | Encodeur magnétique |
| Courant nominal (ADC) | 16.2 | Résolution de l'encodeur de l'anneau extérieur | 15 bits |
| Nombre d'encodeurs | 2 |
Applications
-
Robots à pattes bioniques
-
Exosquelettes pour réhabilitation ou port de charges
-
Véhicules terrestres autonomes (AGV)
-
Systèmes de contrôle de couple d'articulation
-
Robotique humanoïde et quadrupède
Téléchargements
![]() Manuel de conduite et de contrôle de la série AK v1.0.15.X.pdf
Manuel de conduite et de contrôle de la série AK v1.0.15.X.pdf
Détails
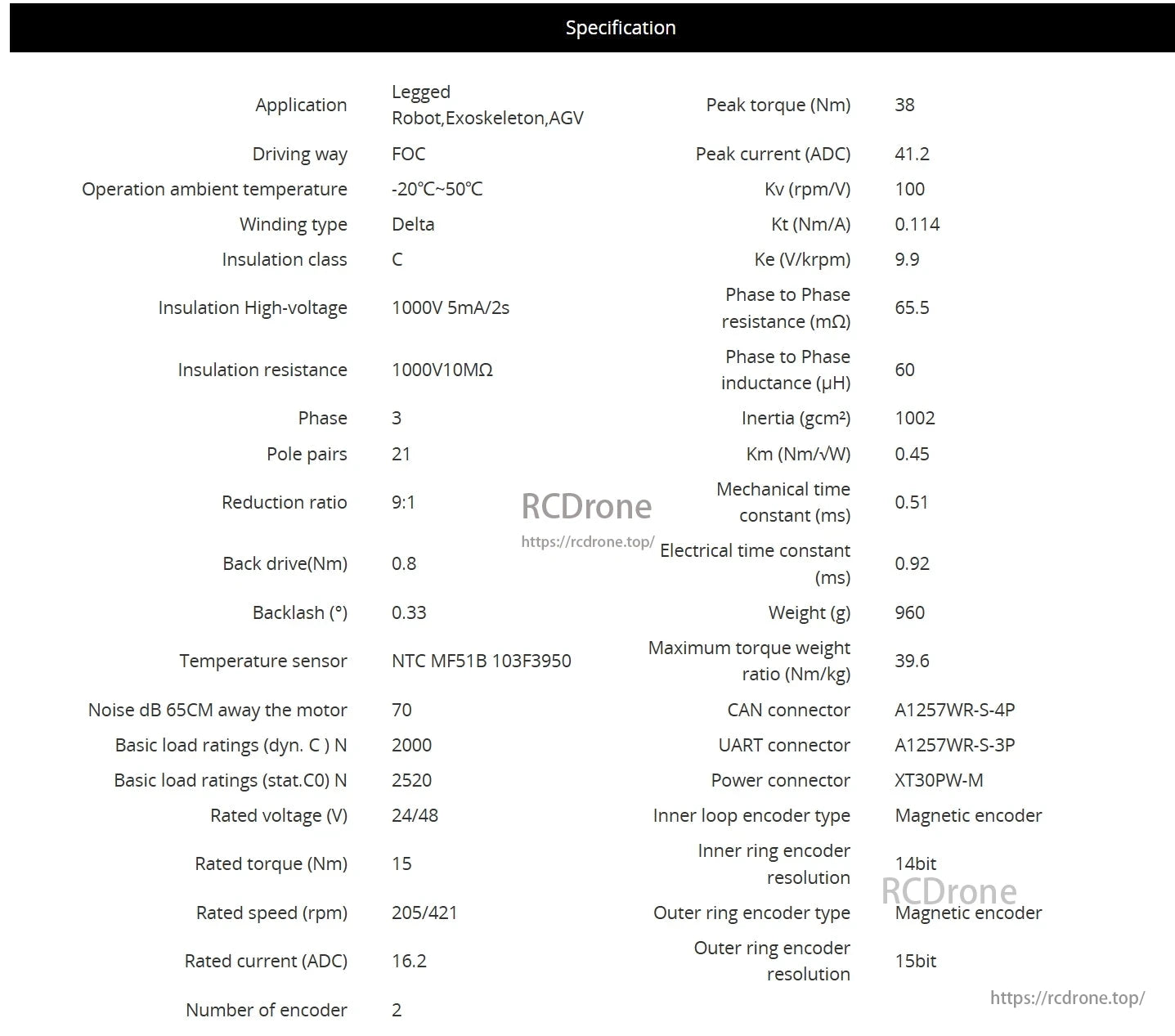
Actionneur robotique CubeMars AK10 : couple de pointe de 38 Nm, 41.2 courant de crête ADC, fonctionnement de -20°C à 50°C, rapport de réduction 9:1, poids de 960g, rapport couple/poids max de 39,6 Nm/kg, bruit de 70 dB, encodeurs magnétiques, connecteurs CAN et UART.

Actionneur Robotique CubeMars AK10 : couple de crête de 48 Nm, courant de crête de 29,8 A, fonctionnement de -20°C à 50°C, isolation de 1000V, 3 phases, 21 paires de pôles, rapport de réduction 9:1, poids de 960g, rapport couple/poids max de 50 Nm/kg, encodeurs magnétiques.

Graphique d'Analyse pour CubeMars AK10-9 V2.0 KV60@48VDC actuateur. Affiche la puissance de sortie (W), l'efficacité, le courant (A) et la vitesse (RPM) par rapport au couple (N.m). L'efficacité atteint son maximum autour de 12 N.m, tandis que la puissance de sortie augmente régulièrement avec le couple. Le courant augmente linéairement, et la vitesse diminue à mesure que le couple augmente. Le graphique met en évidence les caractéristiques de performance de l'actionneur, démontrant sa capacité sous des charges variables.Les indicateurs clés incluent une puissance de sortie maximale dépassant 800 W et une vitesse opérationnelle allant jusqu'à 350 RPM à faibles couples. Ces données aident à comprendre l'efficacité de l'actionneur et la dynamique de puissance dans différentes applications.
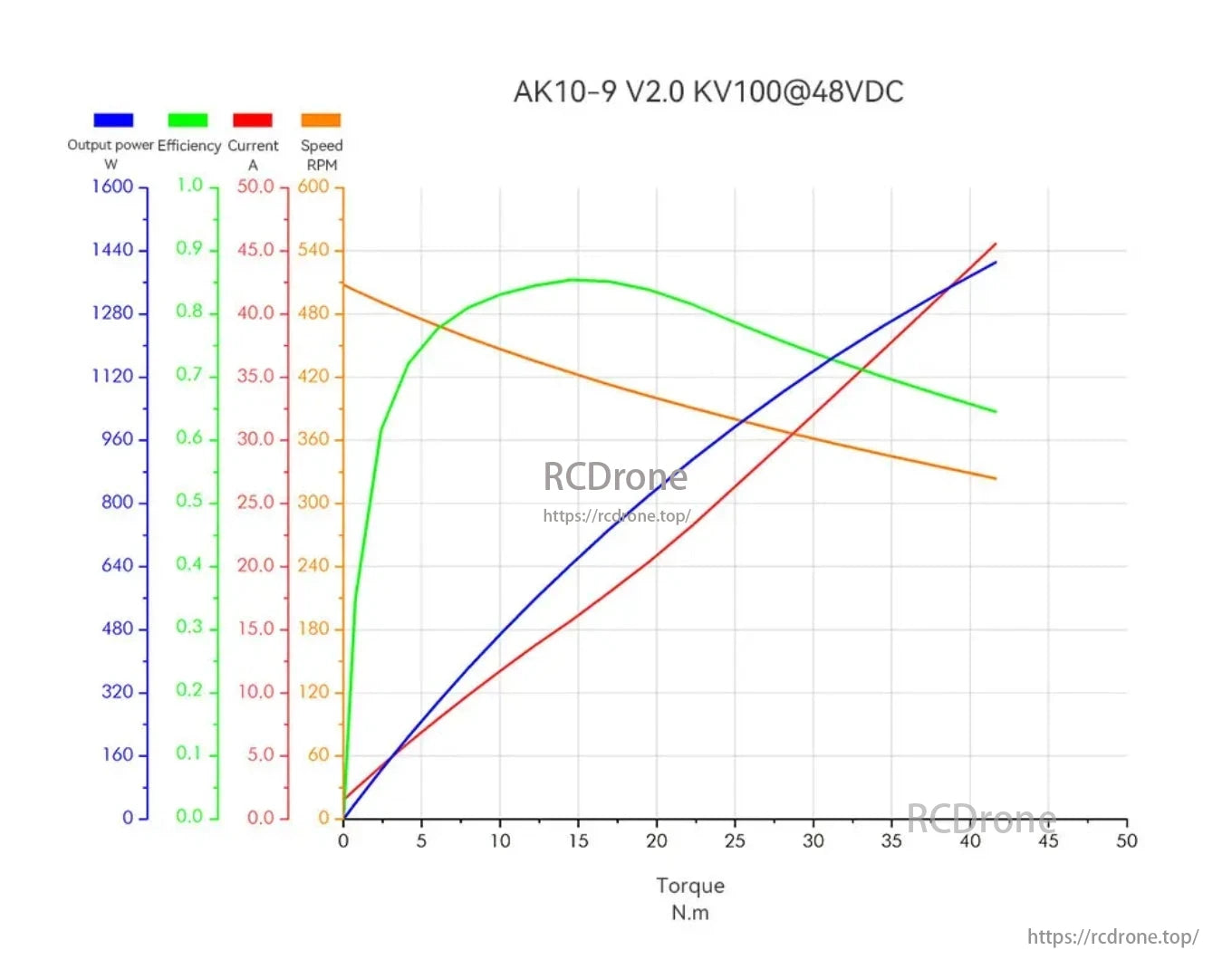
Les performances de l'actionneur CubeMars AK10-9 V2.0 KV100@48VDC actu sont décrites. La puissance de sortie (W), l'efficacité, le courant (A) et la vitesse (RPM) sont tracés en fonction du couple (N.m). L'efficacité atteint son maximum autour de 15 N.m, tandis que la puissance de sortie augmente linéairement avec le couple. Le courant augmente également régulièrement avec le couple. La vitesse diminue à mesure que le couple augmente, commençant à environ 480 RPM à couple nul. Le graphique illustre les points d'opération optimaux pour diverses applications, mettant en évidence les capacités de l'actionneur sous différentes conditions de charge. Ces données aident à sélectionner les réglages appropriés pour des tâches spécifiques.

Servo de puissance intégré CubeMars AK10-9 KV60, modes inclus. Actionneur robotique avec FCC, CE, RoHS V2.0 certification.

L'Actionneur Robotique offre un contrôle moteur efficace, un mode de puissance précis et une réponse plus rapide pour les applications industrielles.

L'Actionneur Robotique CubeMars AK10 comprend un moteur BLDC haute performance, un roulement à rouleaux croisés de qualité industrielle, un capteur de température, un encodeur de sortie, un mode de contrôle double et un réducteur planétaire pour un couple stable.

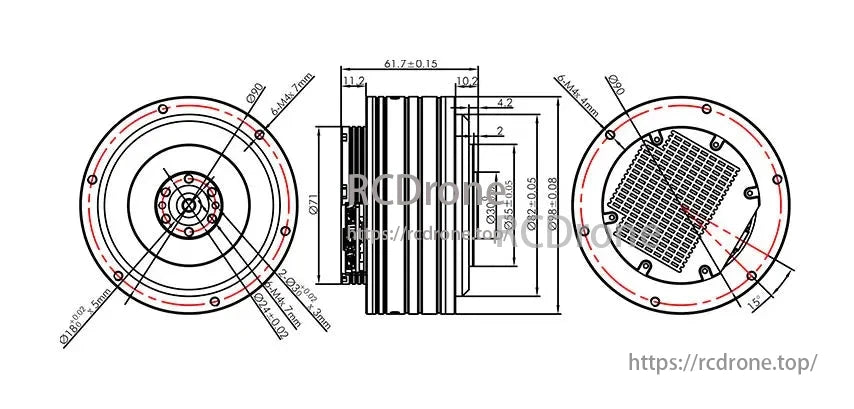
Optimisez rapidement la structure et le rayonnement thermique. Améliorez la dissipation de chaleur du boîtier du moteur pour une longévité et une stabilité de performance du module d'entraînement. SN : 1010921081.
Related Collections






