





CubeMars R80 KV110 Moteur 48V 3-Phases FOC avec capteurs Hall, Exosquelette & Entraînement Robotique
CubeMars R80 KV110 Moteur 48V 3-Phases FOC avec capteurs Hall, Exosquelette & Entraînement Robotique
CubeMars
Impossible de charger la disponibilité du service de retrait
Aperçu
Le moteur CubeMars R80 KV110 est un moteur triphasé destiné aux applications de conduite d'exosquelettes et de robotique, avec des capteurs Hall intégrés et un support pour le FOC (contrôle orienté champ). Il dispose d'un design spécial de dissipation de chaleur et d'une interface de type connecteur pour simplifier l'installation.
Caractéristiques clés
- Capteurs Hall intégrés
- Erreur d'angle électrique : ±10°
- Conception spéciale de dissipation thermique (base ultra-fine & coussin en silicone à haute conductivité thermique ; longueur totale réduite pour améliorer la dissipation thermique)
- Conception de trou de motif sur la cloche pour installation de réducteur (réducteur harmonique, bride ou autres types de réducteurs)
- Conception de connecteur pour une installation plus facile (remplace les fils traditionnels)
- Graphique d'opération analytique du moteur fourni (vitesse vs couple à 48V ; zones de non fonctionnement / fonctionnement à court terme / fonctionnement continu)
Spécifications
| Application | Exosquelette |
| Mode de conduite | FOC |
| Température ambiante de fonctionnement | -20℃~50℃ |
| Type de bobinage | delta |
| Classe d'isolation | H |
| Isolation Haute tension | 1000V 5mA/2s |
| Résistance d'isolement | 1000V10MΩ |
| Phase | 3 |
| Paires de pôles | 21 |
| Tension nominale (V) | 48 |
| Vitesse à vide (tr/min) | 4320 |
| Couple nominal (Nm) | 1.3 |
| Vitesse nominale (tr/min) | 3580 |
| Courant nominal (ADC) | 12.3 |
| Couple de pointe (Nm) | 4 |
| Courant de pointe (ADC) | 38.6 |
| Kv (tr/min/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Résistance phase à phase (mΩ) | 125 |
| Inductance phase à phase (μH) | 87 |
| Inertie (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Constante de temps mécanique (ms) | 0.83 |
| Constante de temps électrique (ms) | 0.70 |
| Poids (g) | 354 |
| Ratio couple maximum poids (Nm/kg) | 11.3 |
| Phase moteur U V W | Dessin technique de référence |
| Port de capteur Hall | VCC, GND, Hu, Hv, HW (dessin technique de référence) |
| Correspondance | Hu-U; Hv-V; Hw-W |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Manuels / Documents
Pour des questions de câblage/choix de driver ou d'aide à la documentation, contactez le support via https://rcdrone.top/ ou par email [email protected].
Remarque du tableau fourni : Toutes les données sont à titre d'information uniquement | Sous réserve de modifications sans préavis.
Détails

Le CubeMars R80 KV110 est conçu pour des joints robotiques compacts et des entraînements d'exosquelettes, avec un facteur de forme de type actionneur à profil bas.

Des capteurs Hall intégrés fournissent un retour d'information sur la position du rotor pour un contrôle FOC stable, avec une déviation de précision de l'angle électrique évaluée à ±10°.

Un design spécial de dissipation thermique utilise une base ultra-fine et un pad en silicone à haute conductivité thermique pour aider à gérer la température dans des constructions compactes.

Des trous de montage en motif sur la cloche simplifient l'attachement d'un réducteur harmonique, d'un flasque ou d'autres types de réducteurs.
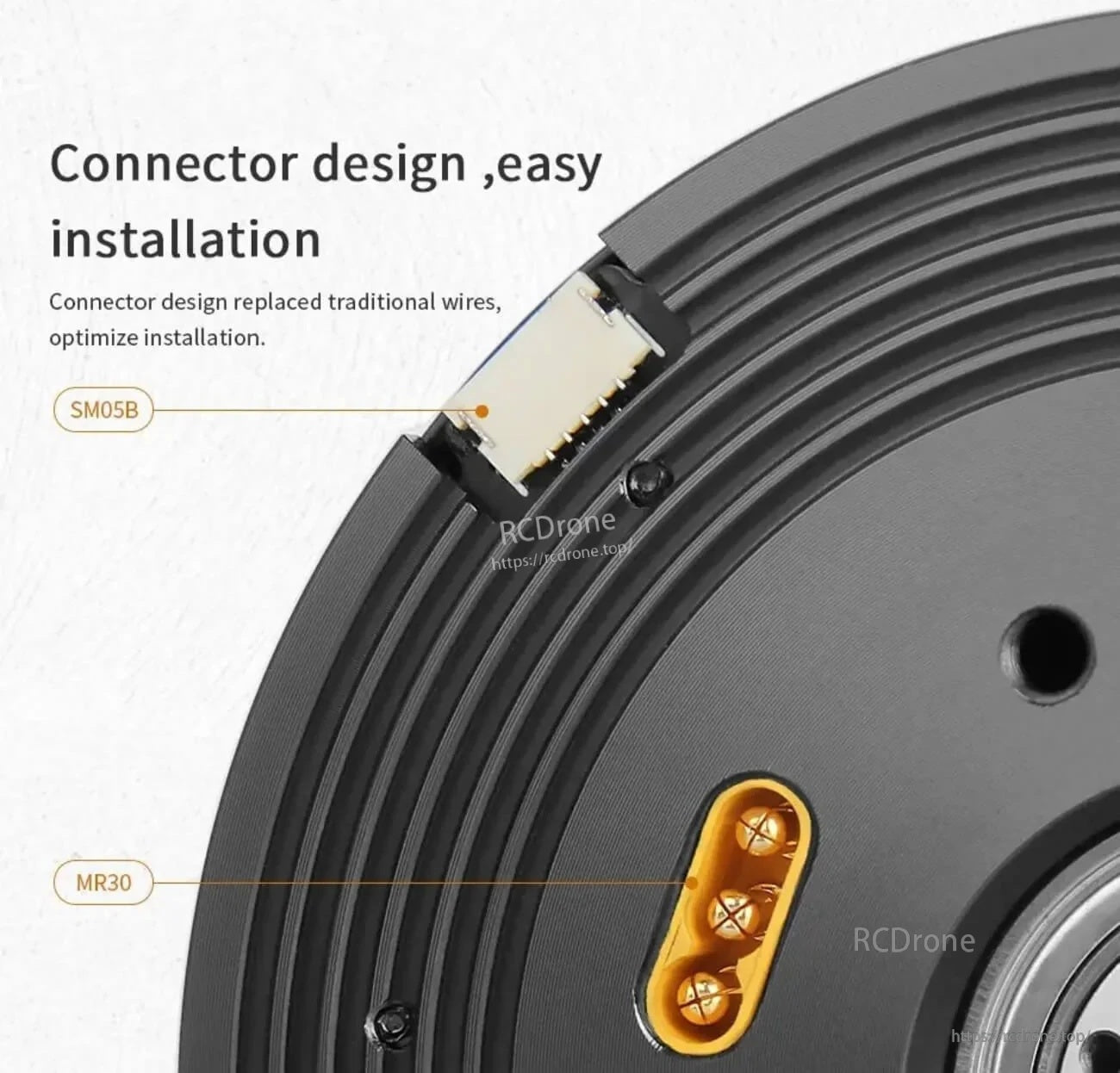
Le câblage de type connecteur remplace les fils traditionnels pour une installation plus propre et plus rapide des connexions d'alimentation et de capteurs.
La conception électromagnétique optimisée vise un faible couple de cogging et une faible inertie du rotor pour un contrôle de mouvement plus fluide.

Conçu pour des robots à pattes lourdes et d'autres applications de joints à couple élevé où une sortie stable est importante.

Le graphique de fonctionnement vitesse‑vs‑couple 48V aide à choisir une plage continue sûre et à comprendre la capacité de pointe à court terme.
Related Collections





