




Moteur couple sans cadre CubeMars RI60 KV120 | 0,57Nm, 120KV, 48V BLDC pour cobot et exosquelette
Moteur couple sans cadre CubeMars RI60 KV120 | 0,57Nm, 120KV, 48V BLDC pour cobot et exosquelette
CubeMars
Impossible de charger la disponibilité du service de retrait
Présentation
Le CubeMars RI60 KV120 moteur à couple inrunner sans cadre est conçu pour des applications robotiques compactes et haute performance. Supportant des tensions de fonctionnement de 24V/36V/48V, ce moteur BLDC sans cadre offre une haute densité de couple, un mouvement fluide à faible cogging, et une résolution de contrôle précise de 0,01°. Avec un diamètre extérieur compact de Φ60mm et un poids de seulement 155,9g, il est idéal pour des bras de cobot, des exosquelettes, et des articulations robotiques avec des contraintes d'espace étroites.
Ce moteur dispose d'un stator enroulé à la main pour un facteur de remplissage en cuivre optimal, de magnets permanents courbés pour une réponse BEMF sinusoïdale efficace, et des options pour l'intégration de capteurs Hall et d'encodeurs. Il prend en charge le Contrôle Orienté Champ (FOC), fonctionne de manière fiable de -20°C à 50°C, et résiste à un couple de pointe allant jusqu'à 1,63 Nm. La version à rotor surélevé améliore la précision du capteur Hall en augmentant la plage de détection de 2 mm.
Caractéristiques Clés
-
Conception BLDC Inrunner sans cadre – Pas de boîtier extérieur, idéal pour les installations intégrées
-
Densité de Couple Élevée – Rapport couple/poids maximal de 10,46 Nm/kg
-
Contrôle Précis – Compatible avec des encodeurs haute résolution, prend en charge 0.01° positionnement
-
Couple de cogging faible – Fonctionnement fluide, réduction des vibrations et du bruit
-
Résistant à la température – Fonctionne dans des températures ambiantes de -20°C à 50°C
-
Interfaces de contrôle multiples – Prend en charge le retour d'encodeur et de capteur Hall
-
Stator enroulé à la main – Excellent remplissage en cuivre, 0.5 mm de dégagement sur le bord pour un assemblage facile
-
Version de rotor optionnelle – +2 mm de hauteur de rotor améliore l'alignement du capteur Hall
Spécifications techniques
Application & Configuration
| Paramètre | Valeur |
|---|---|
| Application | Bras de cobot / Exosquelette |
| Mode de conduite | FOC |
| Phase | 3 Phases |
| Type de bobinage | Delta |
| Paires de pôles | 14 |
| Classe d'isolation | C |
| Tension d'isolation | 500V 5mA/2s |
| Résistance d'isolation | 500V 10MΩ |
| Température de fonctionnement | -20℃ ~ 50℃ |
Caractéristiques Électriques
| Paramètre | Valeur |
|---|---|
| Tension Nominale (V) | 24 / 36 / 48 |
| Vitesse à Vide (tr/min) | 2532 / 3798 / 5064 |
| Vitesse Nominale (tr/min) | 1440 / 2320 / 3190 |
| Couple Nominal (Nm) | 0.57 |
| Couple de Pointe (Nm) | 1.63 |
| Courant Nominal (ADC) | 5.6 |
| Courant de Pointe (ADC) | 16.8 |
| Kv (tr/min/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Résistance de phase (mΩ) | 900 |
| Inductance de phase (μH) | 877.5 |
| Inertie (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Constante de temps mécanique (ms) | 0.3 |
| Constante de temps électrique (ms) | 0.98 |
| Poids (g) | 155.9 |
| Ratio couple/poids | 10.46 Nm/kg |
Options d'encodeur et capteur Hall
-
Avec capteur Hall : Amélioration de la détection du rotor, recommandé pour une détection de position de haute précision
-
Sans capteur Hall : Conception compacte pour environnements contraints
-
Encodeurs pris en charge : Renishaw, Sick, autres encodeurs de haute précision (0.01° résolution)
Dimensions mécaniques
| Version | Diamètre extérieur | Diamètre intérieur | Hauteur du rotor | Épaisseur max |
|---|---|---|---|---|
| Sans Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (max) |
| Avec Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (max) |
Veuillez vous référer aux dessins techniques pour les tolérances exactes et les motifs de trous de montage.
Courbe de performance
Testé à 24VDC:
-
Efficacité maximale à ~0.3 Nm
-
Puissance de sortie maximale >125W à ~1.1 Nm
-
Vitesse max ~2500 RPM
-
Réponse de courant stable sur toute la plage de couple
Informations sur le câblage et le connecteur
| Fil | Couleur + Taille |
|---|---|
| U | Noir + Silicone 18# |
| V | Jaune + Silicone 18# |
| W | Rouge + Silicone 18# |
| Hu | Bleu + Silicone 30# |
| Hv | Vert + Silicone 30# |
| Hw | Jaune + Silicone 30# |
| VCC | Rouge + Silicone 30# |
| GND | Noir + Silicone 30# |
Carte de câblage :
Hu-U, Hv-V, Hw-W
Téléchargements de manuels
Applications
-
Bras robotiques collaboratifs
-
Articulations d'exosquelette
-
Robots à pattes et quadrupèdes
-
Robotique médicale de précision
-
Modules servo embarqués
Détails
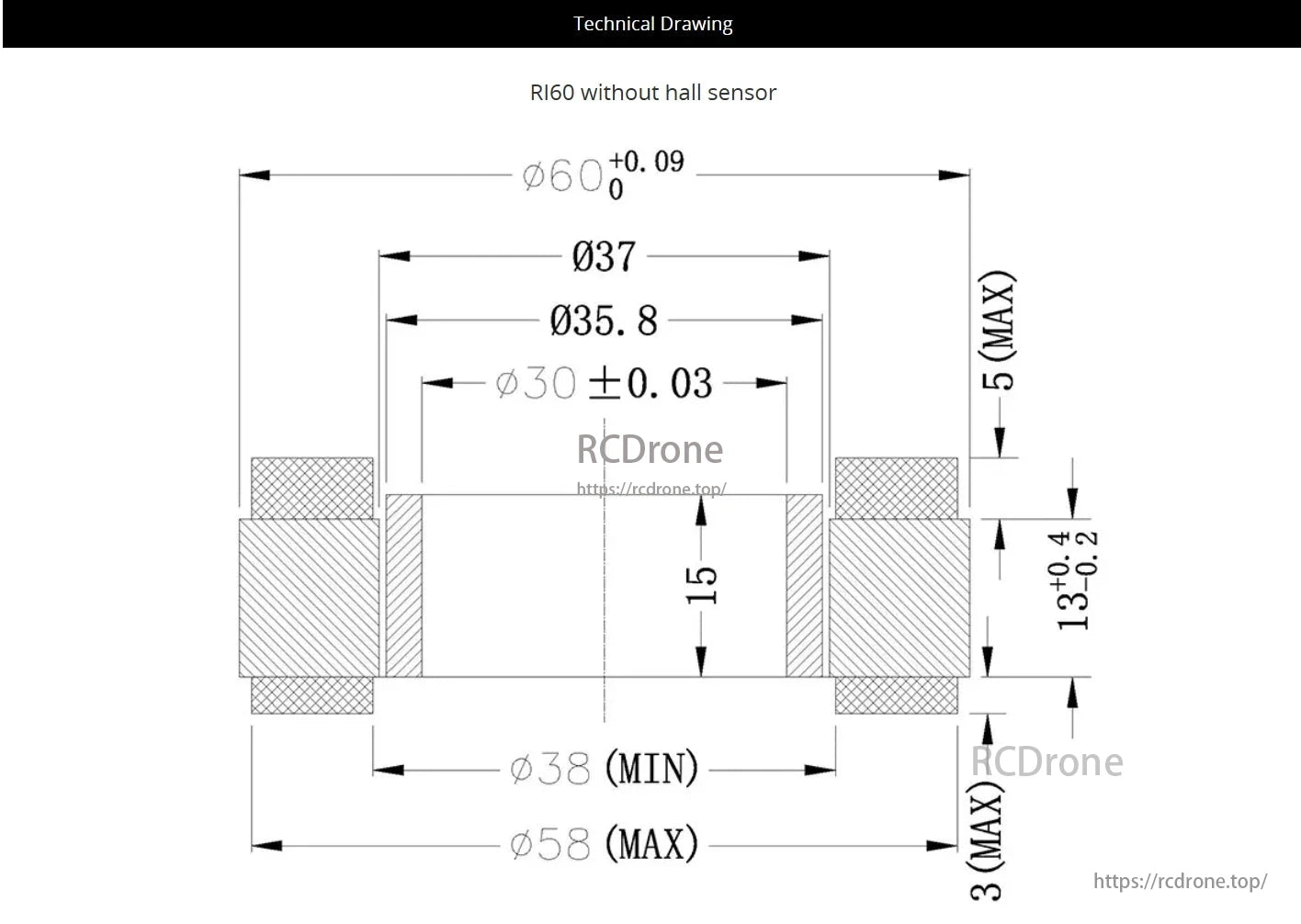
CubeMars Dimensions du moteur RI60 : Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), 15 longueur, 5 hauteur max, 13 ±0.4 largeur.
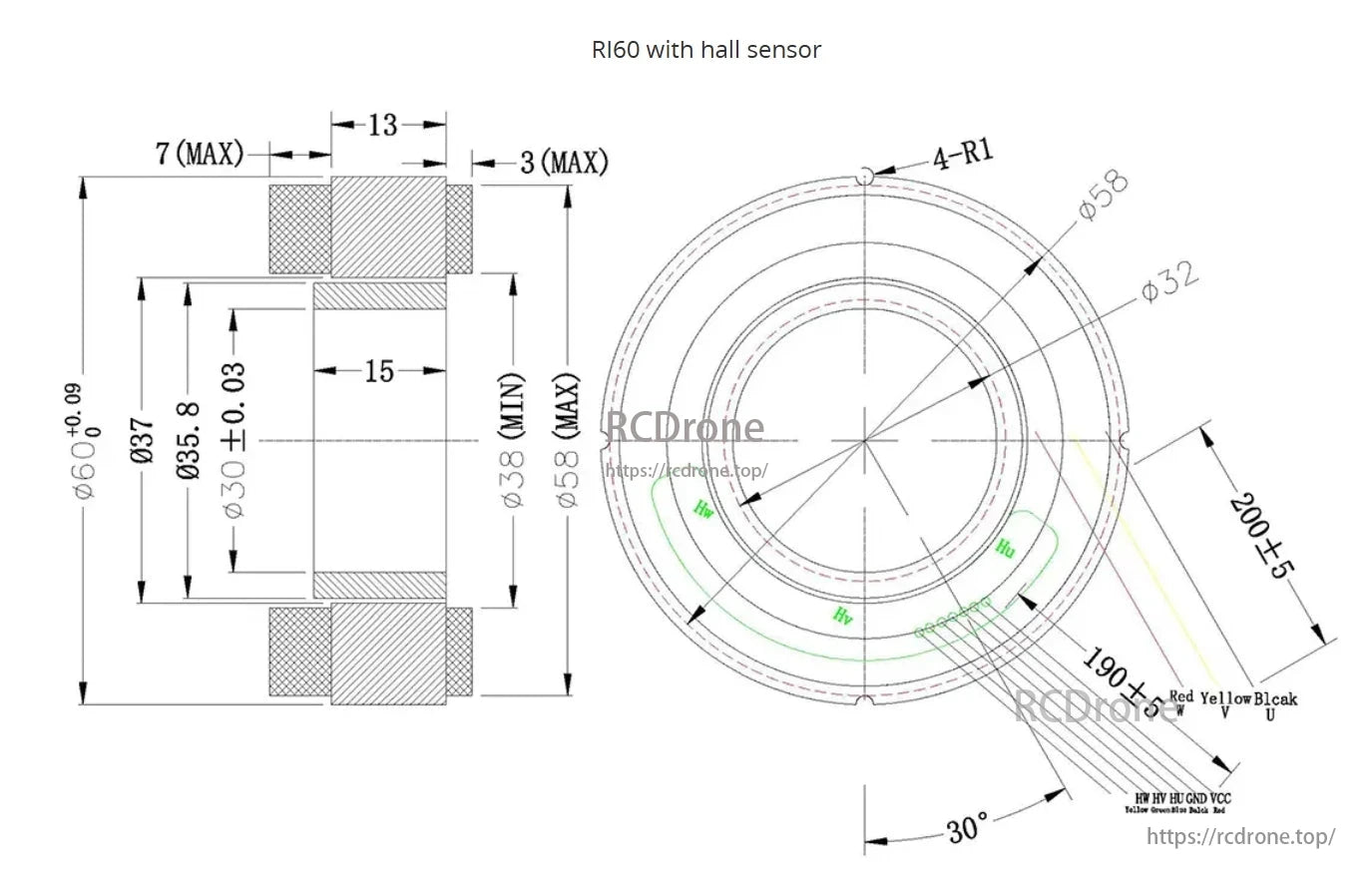
Moteur CubeMars RI60 avec capteur Hall. Dimensions : diamètre 60 mm, longueur 200 mm. Comprend des marquages 4-R1, φ58, φ32 et un angle de 30°. Inclut les étiquettes HW, HV, HU.
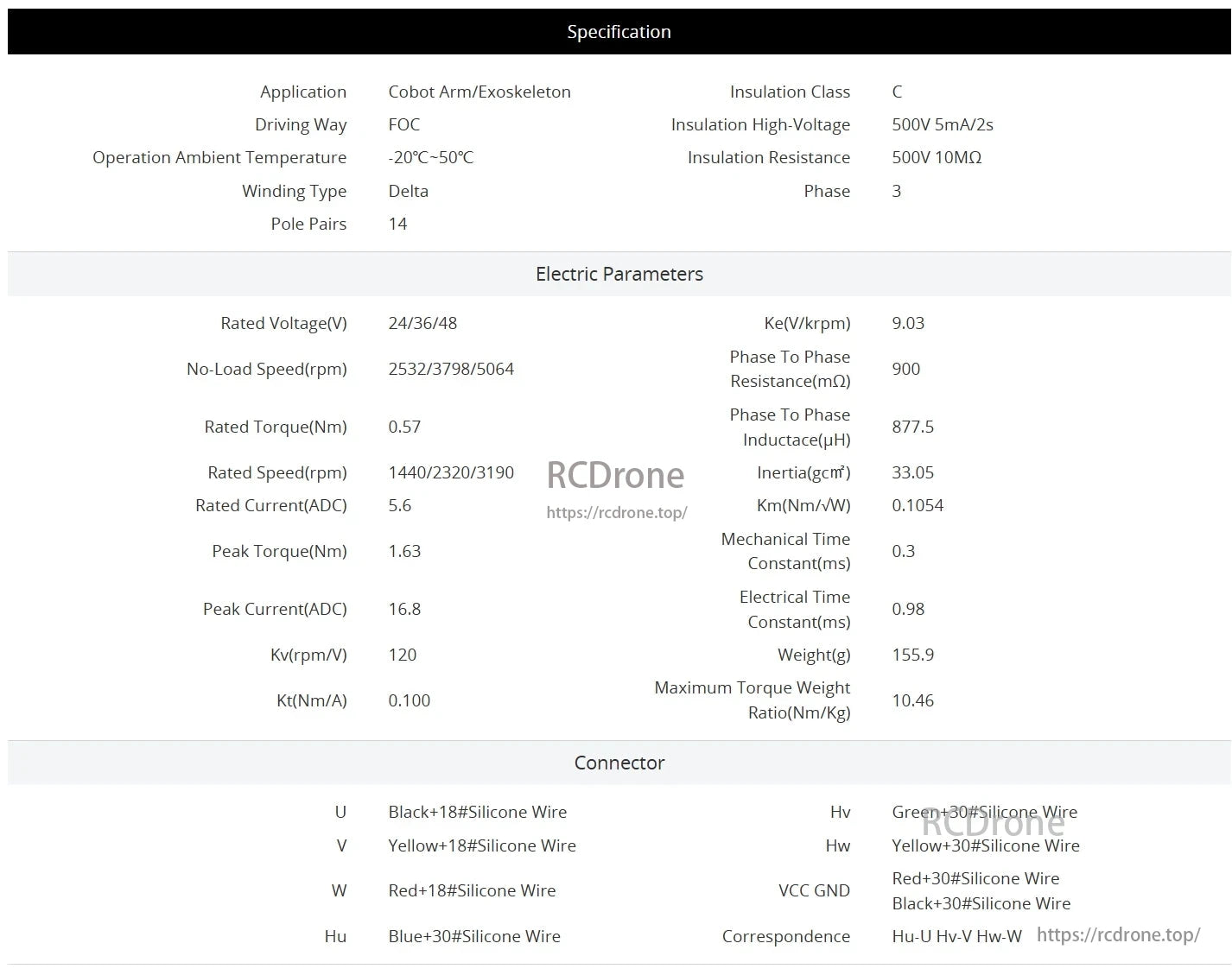
Moteur CubeMars RI60 : application bras cobot/exosquelette, entraînement FOC, fonctionnement de -20°C à 50°C, 14 paires de pôles. Tension nominale 24/36/48V, vitesse à vide 2532/3798/5064 tr/min, couple nominal 0.57Nm, couple de pointe 1.63Nm.
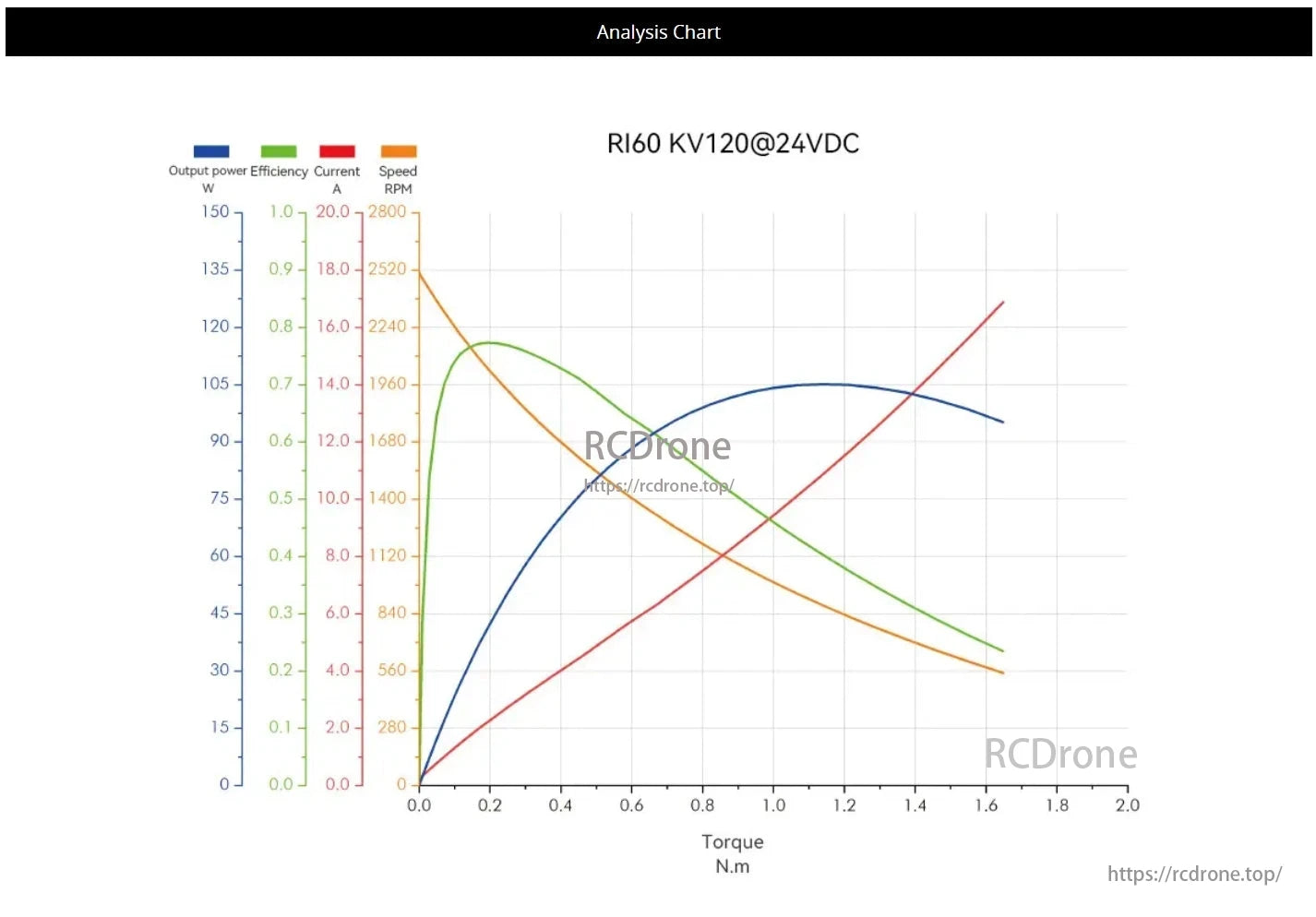
Graphique d'analyse du moteur CubeMars RI60 à KV120@24VDC. Dispprésente la puissance de sortie, l'efficacité, le courant et la vitesse en fonction du couple. L'efficacité atteint un pic près de 0.2 N.m, avec une diminution de la vitesse à mesure que le couple augmente.
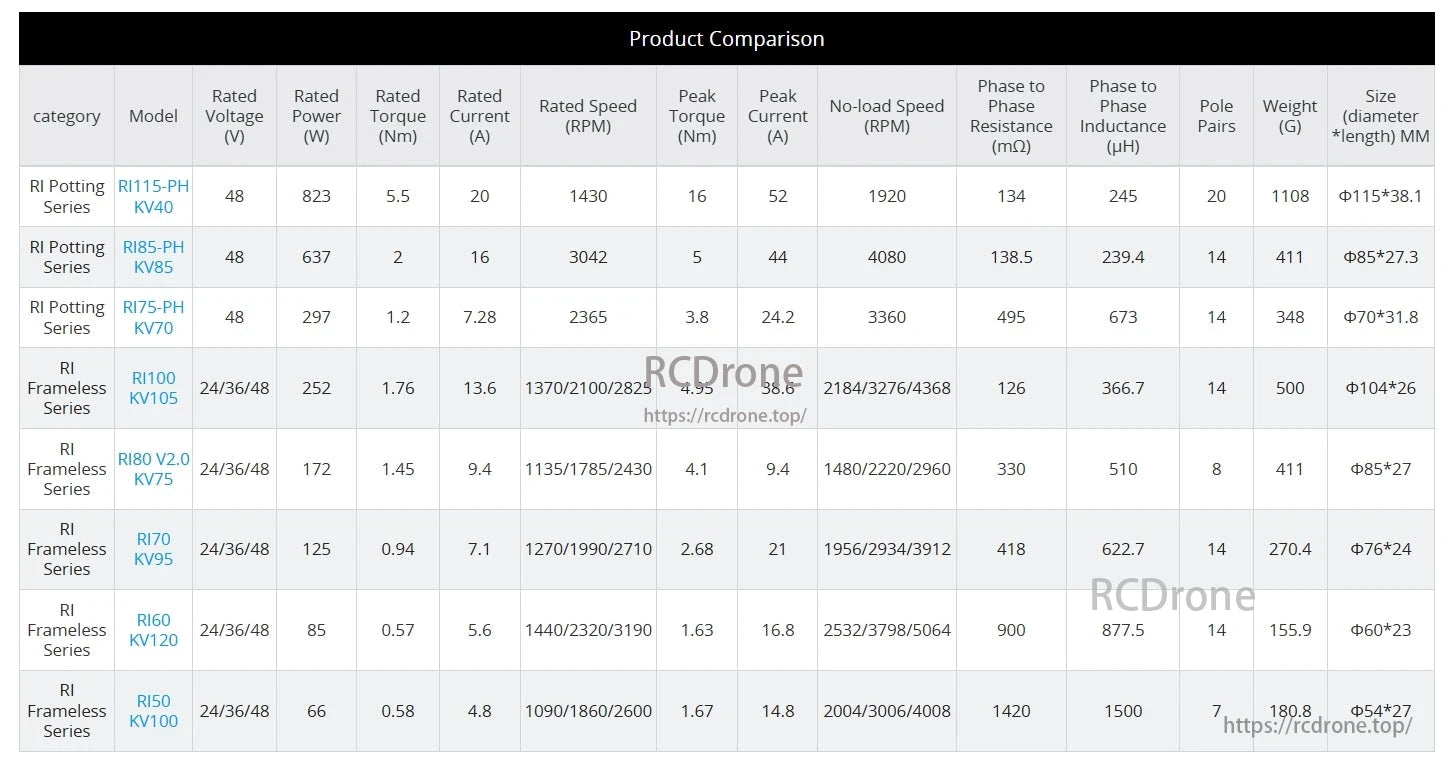
Moteur CubeMars RI60 KV120 : 24/36/48V, 85W, couple de 0.57Nm, courant de 5.6A, vitesse de 1440/2320/3190 RPM, couple de pointe de 1.63Nm, courant de pointe de 16.8A, résistance de 900mΩ, inductance de 877.5µH, 14 paires de pôles, poids de 155.9g, taille φ60*23mm.

Moteur CubeMars RI60 : Couple de cogging réduit, fonctionnement fluide, faible bruit, dynamique puissante.

Stator enroulé à la main avec un jeu de 0,5 mm pour des performances optimales.

Magnète permanent courbé pour la conception de moteur Sinus BEMF, garantissant un contrôle facile.

Version rehaussée du rotor RI60. Hauteur totale augmentée de 2 mm pour une meilleure détection par le capteur Hall.
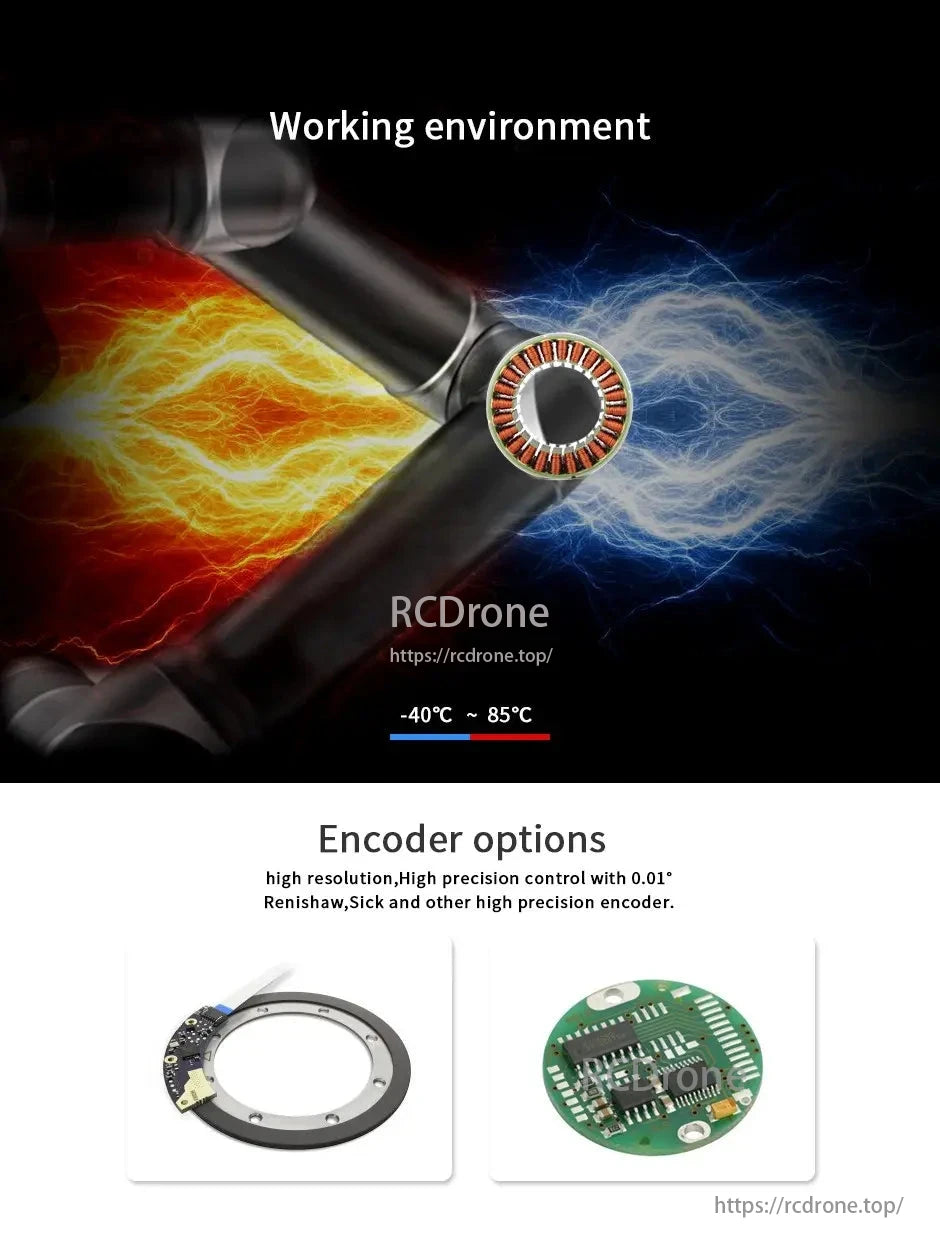
Moteur CubeMars RI60 : -40°C à 85°C, options d'encodeur haute résolution.
Related Collections




