




Moteur robot DAMIAO DM-J4310-2EC, 24V, 3 N.m nominal, 7 N.m crête, 120 tr/min, CAN@1Mbps, UART@921600bps
Moteur robot DAMIAO DM-J4310-2EC, 24V, 3 N.m nominal, 7 N.m crête, 120 tr/min, CAN@1Mbps, UART@921600bps
DAMIAO
Impossible de charger la disponibilité du service de retrait
Présentation
DAMIAO DM-J4310-2EC est un moteur robot compact avec un réducteur intégré et des encodeurs magnétiques doubles pour un contrôle de mouvement précis. Il fonctionne à 24 V et fournit un couple nominal de 3 N.M, un couple de pointe de 7 N.M et une vitesse nominale de 120 RPM via un étage de réduction de 10:1. Le contrôle et la configuration sont pris en charge via CAN@1Mbps et UART@921600bps.
Caractéristiques clés
- Fonctionnement à 24 V avec un courant nominal de 2,5 A et un courant de pointe de 7,5 A
- Réduction de 10:1 pour un couple de sortie élevé : 3 N.M nominal, 7 N.M de pointe
- Encodeurs magnétiques à tour unique doubles, résolution 14 bits
- Taille compacte et léger : diamètre extérieur de 57 mm, hauteur de 46 mm, 300 g
- Interface de contrôle CAN@1Mbps ; configuration UART@921600bps
Spécifications
| Paramètre | Valeur |
|---|---|
| Modèle | DM-J4310-2EC |
| Tension nominale | 24 V |
| Courant nominal | 2.5A |
| Courant de pointe | 7.5A |
| Couple nominal | 3 N.M |
| Couple de pointe | 7 N.M |
| Vitesse nominale | 120 RPM |
| Max.html | |
| Vitesse à vide | 200 RPM |
| Rapport de réduction | 10:1 |
| Paires de pôles | 14 |
| Inductance de phase | 340uH |
| Résistance de phase | 650 mOhm |
| Diamètre extérieur | 57mm |
| Hauteur | 46mm |
| Poids du moteur | 300g |
| Résolution de l'encodeur | 14Bit |
| Quantité d'encodeurs | 2 |
| Type d'encodeur | Encodeur magnétique à tour unique |
| Interface de contrôle | CAN@1Mbps |
| Interface de configuration | UART@921600bps |
Dimensions du moteur
- Diamètre extérieur : 57mm
- Hauteur totale : 46mm ; longueur du corps : 45mm
- Cercle de boulons de la face avant : 6 x M3, profondeur du trou 5 ; diamètre du cercle 50mm
- Cercle de boulons de la face arrière : 4 x M3, profondeur du trou 4 ; diamètre du cercle 38mm
- Cercle intérieur : 24. html 30mm
- Trois trous : 4mm (+0.04 / +0.02)
- Deux trous : 3mm (+0.04 / +0.02), profondeur 5
- Angle de fonctionnalité : 15°
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Intégration Open Source
OpenArm est un bras de robot humanoïde entièrement open-source conçu pour la recherche et le déploiement de l'IA physique dans des environnements riches en contact.
Manuels
- DAMIAO_DM_J4310_2EC_V1.1_Motor.stp
- DM-J4310-2EC_Gear_Motor_Instructions.pdf
- DM_J4310_V1.1_dessin_d'installation.pdf
Détails

Dessin technique du moteur robot avec dimensions et spécifications
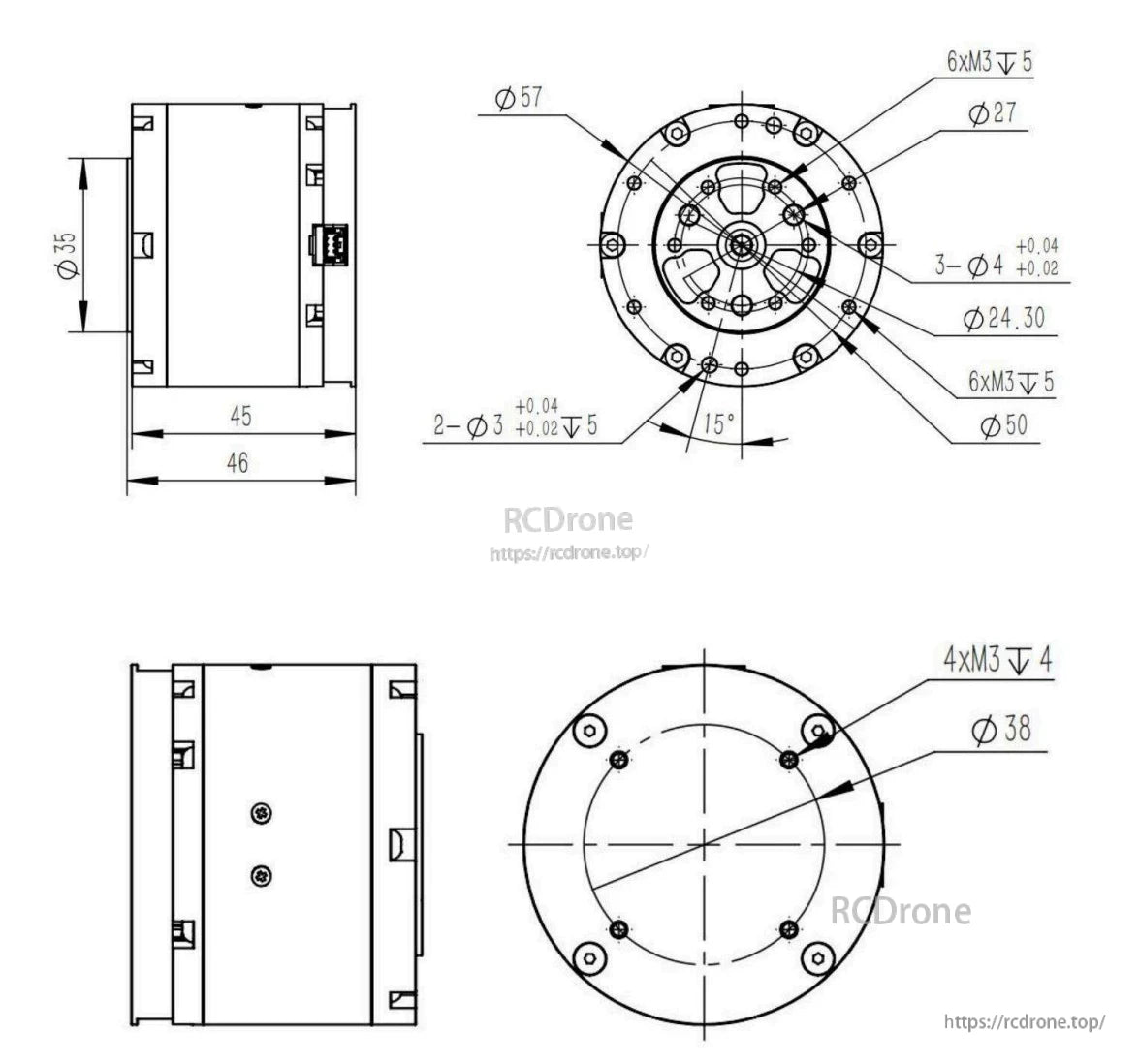
Spécifications, dimensions et dessins mécaniques du moteur robot DAMIAO DM-J4310-2EC inclus.
Related Collections




