




DFRobot SEN0142 MPU6050 Module IMU 6 DOF Gyroscope Accéléromètre avec processeur de mouvement numérique I2C pour Arduino & Robotique
DFRobot SEN0142 MPU6050 Module IMU 6 DOF Gyroscope Accéléromètre avec processeur de mouvement numérique I2C pour Arduino & Robotique
DFRobot
Impossible de charger la disponibilité du service de retrait
Aperçu
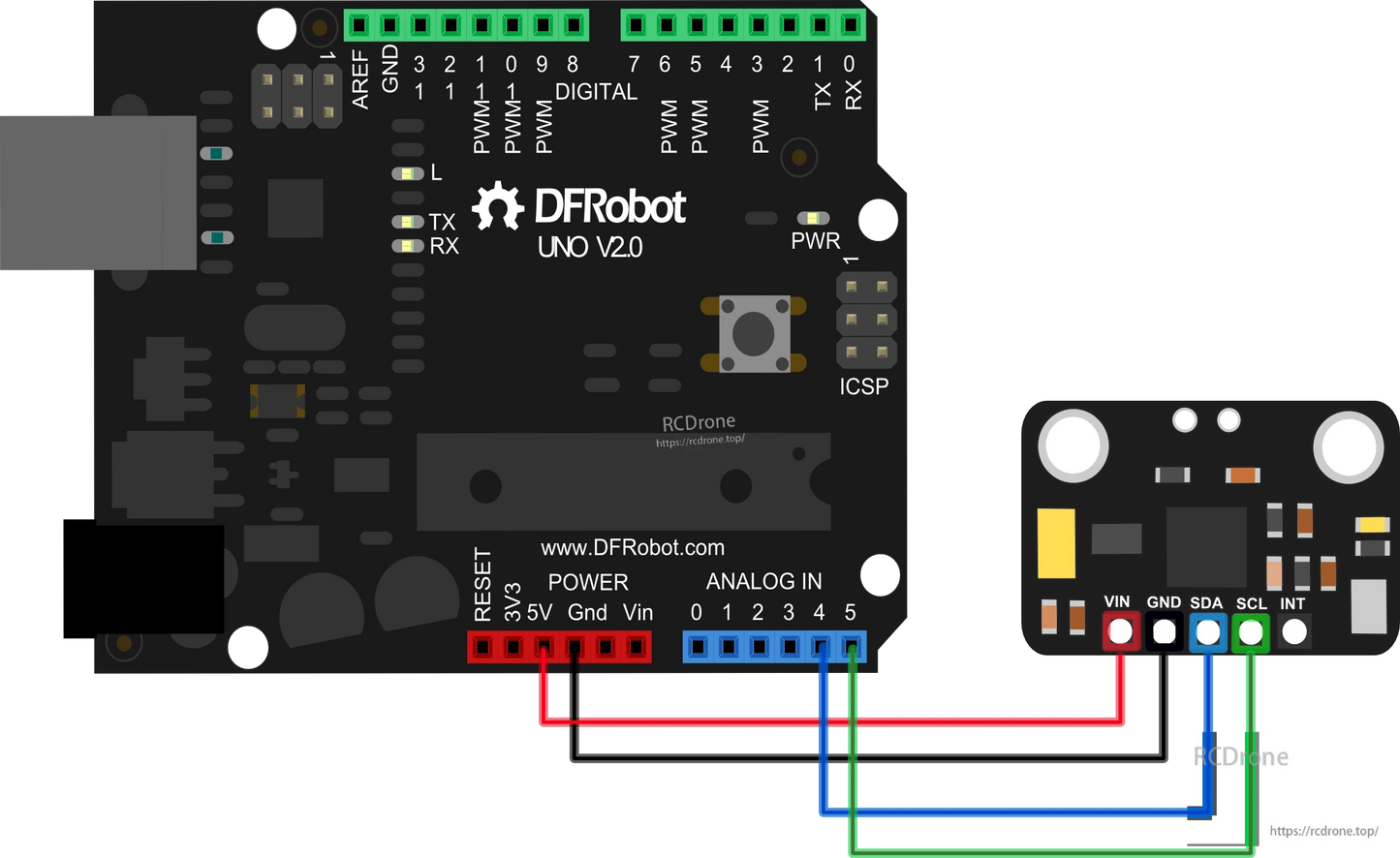
Le DFRobot SEN0142 module IMU 6 DOF MPU6050 intègre un gyroscope à 3 axes et un accéléromètre à 3 axes sur une seule puce, offrant une détection de mouvement précise pour la robotique, les drones, les dispositifs portables et les projets Arduino. Doté d'un processeur de mouvement numérique (DMP), il prend en charge des algorithmes avancés de fusion de mouvement à 6 axes et 9 axes, permettant la sortie de données de quaternion, d'angle d'Euler et de capteur brut. Avec une large plage de tension d'entrée de 3V–5V, le MPU6050 peut être directement connecté à Arduino et à d'autres microcontrôleurs pour le suivi de mouvement en temps réel et la détection de gestes.
Caractéristiques clés
-
Combine un gyroscope à 3 axes et un accéléromètre à 3 axes sur une seule puce
-
Plage d'accéléromètre programmable: ±2g, ±4g, ±8g, ±16g
-
Sensibilité du gyroscope: ±250, ±500, ±1000, ±2000 dps
-
Processeur de mouvement numérique (DMP) pour la fusion de mouvement et la reconnaissance de gestes embarquées
-
Interface numérique I2C prend en charge les formats de données matricielles, quaternion, Euler et brutes
-
Calibration de biais & boussole intégrée pour une précision améliorée
-
Compatible avec Arduino et l'électronique portable via I2Cdevlib
Spécifications
-
Tension de fonctionnement: 3–5 V
Sortie: Données I2C numériques (données de MotionFusion 6/9 axes)
-
Accéléromètre: Plage programmable de ±2g / ±4g / ±8g / ±16g
-
Gyroscope: Sensibilité de ±250 / ±500 / ±1000 / ±2000 dps
-
Format de données: Matrice de rotation, quaternion, angle d'Euler, données brutes
-
Dimensions: 14 × 21 mm
Applications
-
Détection de mouvement en robotique
-
Projets électroniques Arduino &et DIY
-
Interaction homme-machine (IHM)
-
Dispositifs portables et contrôle gestuel
-
Systèmes de navigation et d'équilibrage (e.g., Transporteurs de type Segway)
-
Stabilisation de drone et suivi de mouvement
Détails



Code d'exemple
Veuillez télécharger les bibliothèques pour tous les capteurs IMU d'abord !




- Le choix d'une sélection entraîne l'actualisation de la page entière.
- S'ouvre dans une nouvelle fenêtre.