


Contrôleur de vol BETAFPV F4 2-3S 20A AIO V1, ELRS série 2.4G, BEC 9V/5V, DJI O3 PMU 6 broches
Contrôleur de vol BETAFPV F4 2-3S 20A AIO V1, ELRS série 2.4G, BEC 9V/5V, DJI O3 PMU 6 broches
BETAFPV
Impossible de charger la disponibilité du service de retrait
Aperçu
Le BETAFPV F4 2-3S 20A AIO FC V1 est un contrôleur de vol AIO conçu pour des constructions VTX numériques HD utilisant des batteries 2-3S. Il combine un ESC de 20A avec une solution BEC double (9V@2A for DJI O3 et 5V@3A for appareils externes) pour aider à maintenir une alimentation stable lors des changements de gaz. Il dispose également d'un connecteur PMU 6 broches DJI O3 pour une installation sans soudure et d'un port USB SH1.0 4 broches à l'arrière pour le réglage et l'entretien.
Caractéristiques clés
- Tension d'entrée : 2-3S
- Sorties BEC doubles : 9V@2A (DJI O3) et 5V@3A (appareils externes)
- DJI O3 6 broches PMU pour une installation VTX HD plus facile (pas de soudure pour le connecteur)
- ESC intégré : 20A continu, 25A pic ; support de signal D-shot300 / D-shot600
- MCU : STM32F405RGT6 @ 168MHz
- Récepteur intégré : Serial ELRS 2.4G (protocole CRSF)
- IMU (SPI) : ICM42688P / ICM42605 (les notes graphiques montrent “@8K”)
- Boîte noire de 16 Mo ; baromètre ; tension & détection de courant
- Port USB déplacé à l'arrière (SH1.0 4 broches)
- UART3 peut être libéré (TX3/RX3) et l'alimentation RX intégrée peut être coupée via des modifications matérielles décrites ci-dessous
Spécifications
| Poids | 5,58 g (sans connecteurs de moteur et câble d'alimentation) ; 5,92 g (avec connecteurs de moteur) |
| Taille du trou de montage | 26 mm x 26 mm |
| CPU | STM32F405RGT6 (168 MHz) |
| IMU à six axes (SPI) | ICM42688P / ICM42605 |
| Récepteur (RX) | Récepteur ELRS 2.4G série |
| Version du firmware RX | BETAFPV AIO 2400 RX ELRS V3.3.0 |
| Antenne | Fil émaillé |
| Mémoire Blackbox | 16 Mo |
| Capteurs | Baromètre (BMP280 / DSP310); Tension & Courant |
| 5V BEC | 5V 3A@8V supply * |
| 9V BEC | 9V 2A@8V supply * |
| Port USB | SH1.0 4 broches |
| Courant ESC intégré | 20A continu; pic 25A |
| Tension d'entrée ESC | 2-3S |
| Version du firmware FC | Betaflight_4.4.1_BETAFPVF405 |
| Firmware ESC | C_X_70_48_V0.19.2.hex (matériel BB51 Bluejay) |
| Support de signal ESC | D-shot300, D-shot600 |
* Le courant de sortie du BEC diminuera à mesure que la température augmente.
Points saillants du câblage / Pinout (à partir des diagrammes de la carte)
- Points de batterie : Batt+ (2-3S), Batt-
- Port VTX numérique HD (connecteur) ; note VCC indiquée : 9V (par défaut) / 5V
- Points I2C : SCL, SDA
- Points UART indiqués : T1/R1, T6/R6, TX3/RX3, TX4/RX4 ; point SBUS également indiqué
- Points de buzzer : BUZZ+ et BUZZ- ; points LED indiqués
- Marquage du baromètre : BMP280/DSP310
- Marquages liés au récepteur indiqués : SX1280/SX1281, ESP8285, antenne WiFi, LED RX (verte), LED FC (bleue)
- Marquages du diagramme inférieur : bouton BOOT FC/Récepteur, LED RGB 1 / LED RGB 2, 5V BEC, capteur de courant intégré
- Points USB indiqués sur le diagramme inférieur : D-, D+, GND, USB 5V
- Marquage MCU ESC indiqué sur le diagramme inférieur : EFM8BB51 (FW C_X_70) ; “20A MOS” indiqué autour des zones ESC ; étiquettes ESC1/ESC2/ESC3/ESC4
Notes de configuration (texte indiqué dans le graphique de câblage)
- Pour le VTX numérique HD, UART4 nécessite que la Configuration/MSP soit activée.
- Si un récepteur externe est utilisé, configurez UART1/6 pour être défini comme Serial RX.
- GPS : définissez l'entrée du capteur sur « GPS » dans UART1/6, puis activez le GPS sous l'onglet GPS et sélectionnez le bon protocole pour le module GPS.
- RX protocole SBUS : définissez le mode récepteur sur « Récepteur basé sur série » et définissez le fournisseur de récepteur série sur « SBUS ».
- RX protocole CRSF : définissez le mode récepteur sur « Récepteur basé sur série » et définissez le fournisseur de récepteur série sur « CRSF ».
- Exemples de VTX numériques HD montrés : Caddx Vista / Runcam Link VTX, Walksnail VTX, HDZero VTX.
- Exemples de RX protocole SBUS montrés : Frsky XM+ / Futaba AC900 / Flysky RX2A Pro.
- Exemples de RX protocole CRSF montrés : TBS Nano / ELRS Series RX.
- Note affichée : certaines unités VTX numériques HD peuvent inclure un récepteur SBUS intégré (fonctionne avec la radio DJI). Lors de l'utilisation d'un récepteur externe, le câblage SBUS vers le VTX numérique peut ne pas être nécessaire.
FAQ / Options matérielles
- Coupe de courant : Retirer la perle de puce déconnecte l'alimentation ; pour réutiliser le récepteur ELRS intégré, soudez les pads de soudure ensemble pour restaurer l'alimentation.
- Libération de UART3 : Retirer deux résistances sur les pads de soudure libère UART3 (gauche : TX3, droite : RX3). Pour reconnecter, soudez les pads de soudure ensemble lors de la réutilisation du récepteur ELRS intégré.
- Interrupteur de tension (connecteur HD VTX) : La tension par défaut pour le connecteur HD VTX est de 9V. Pour utiliser WalkSnail Avatar HD mini 1s et Lite, assurez-vous que l'alimentation est de 5V en déplaçant la perle de puce de la position 9V à la position 5V (ou utilisez de la soudure au lieu de la perle de puce pour passer entre les pads de 5V et 9V).
- Remarque sur le choix du moteur : Évitez les moteurs au-dessus de 20 000KV.
Firmware / Téléchargements
Pour des questions sur la construction, le câblage ou le firmware, contactez https://rcdrone.top/ ou [email protected].
- Firmware FC (version STM32F405) : Betaflight_4.4.1_BETAFVF405
- Téléchargement du dump CLI du firmware : https://support.betafpv.com/hc/en-us/articles/21884915967513-CLI-for-F4-2-3S-20A-Flight-Controller-ELRS-V1-0-
- Version Betaflight 4.4.1 : https://github.com/betaflight/betaflight/releases/tag/4.4.1
Notes sur le firmware ESC
- Solution ESC BB51 basée sur BLHeliSuite16714903 avec le firmware ESC Bluejay.
- Prend en charge le D-shot bidirectionnel et le filtrage RPM dans Betaflight.
- Options de fréquence PWM : 24kHz, 48kHz, 96kHz ; réglage d'usine par défaut : 48kHz.
- 96kHz n'est pas recommandé dans les notes fournies en raison de problèmes possibles de réglage au ralenti du moteur.
- Avertissement fourni : ne pas flasher le firmware avec un intervalle plus court, car cela peut provoquer un blocage et endommager le contrôleur de vol.
- Configurateur ESC : https://preview.esc-configurator.com/
- BLHeliSuite16714903 : https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Versions du firmware Bluejay : https://github.com/bird-sanctuary/bluejay/releases (note affichée : choisir C_X_70.HEX)
RX ELRS 2.4G série (notes de mise à jour de liaison &)
- Utilise le protocole CRSF entre le récepteur et le contrôleur de vol.
- Entrez le statut de liaison en allumant/éteignant trois fois (branchez et débranchez le contrôleur de vol trois fois).
- Indication du mode de liaison : clignotement rapide à double du LED RX ; lié : lumière fixe.
- Méthodes de mise à jour du récepteur notées : Wi-Fi ou passthrough série Betaflight.
- Notes de mise à jour du passthrough affichées : branchez le FC à l'ordinateur, ne vous connectez pas au Configurateur Betaflight ; choisissez la cible “BETAFPV 2.4GHz AIO RX” ; flashez en utilisant le passthrough Betaflight dans le Configurateur ExpressLRS.
- Guide de flashage du firmware : https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Ce qui est inclus
- 1 x F4 2-3S 20A AIO FC V1
- 4 x vis à machine M2*10
- 4 x vis en nylon M2*10
- 4 x écrous M2
- 4 x billes d'absorption des chocs
- 4 x prise angulaire JST1.25mm
- 4 x prise droite JST1.25mm
- 1 x câble adaptateur 4 broches SH1.0
- 1 x adaptateur Type-C à SH1.0
- 1 x cordon d'alimentation XT30
- 1 x condensateur de filtrage
- 1 x fil de connecteur VTX double tête de 30 mm
- 1 x fil de connecteur VTX simple tête de 60 mm
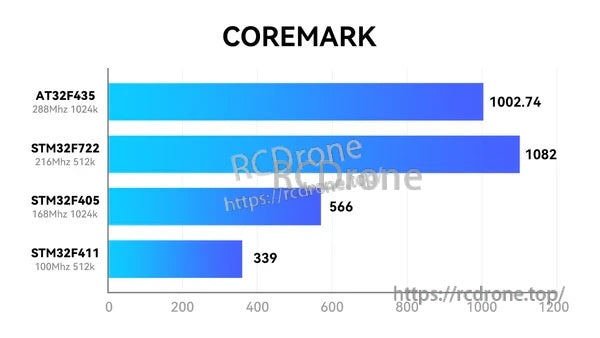
Référence (tableau CoreMark montré dans le graphique du produit)
| AT32F435 (288MHz 1024k) | 1002.74 |
| STM32F722 (216MHz 512k) | 1082 |
| STM32F405 (168MHz 1024k) | 566 |
| STM32F411 (100MHz 512k) | 339 |
Détails

Une solution AIO compacte 2–3S qui associe un contrôleur de vol F4 avec un ESC de 20A pour des constructions de style HD whoop.

La carte des pads supérieure claire aide à identifier le connecteur VTX numérique DJI, batterie pads, UARTs, et connexions buzzer/LED avant de souder.
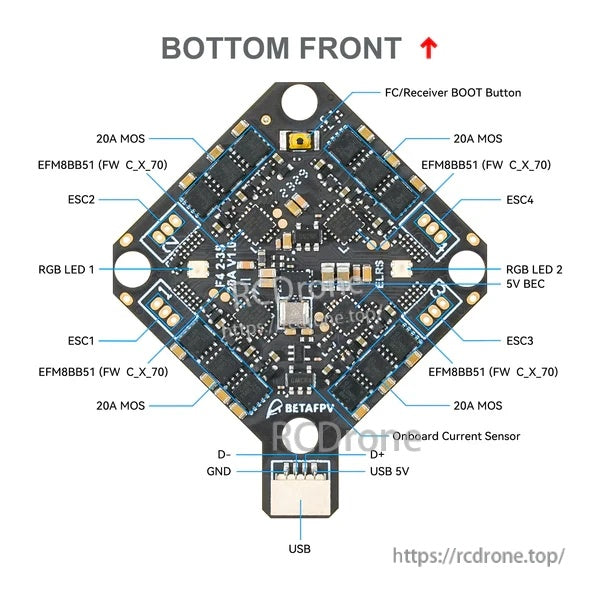
Le schéma de la face inférieure met en évidence les sections ESC, le bouton de démarrage, les pads LED RGB, le capteur de courant intégré, et les points de câblage USB.
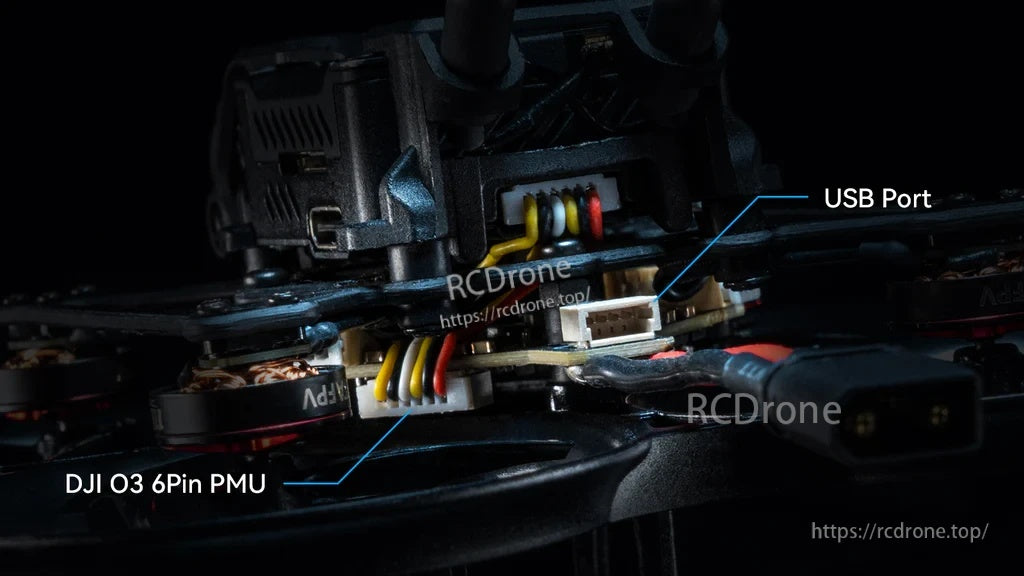
Un port USB monté à l'arrière et le connecteur PMU DJI O3 gardent le câblage propre sur des cadres compacts.


Le connecteur VTX HD est configuré par défaut à 9V, avec une option alternative de 5V disponible via un petit changement de soudure.

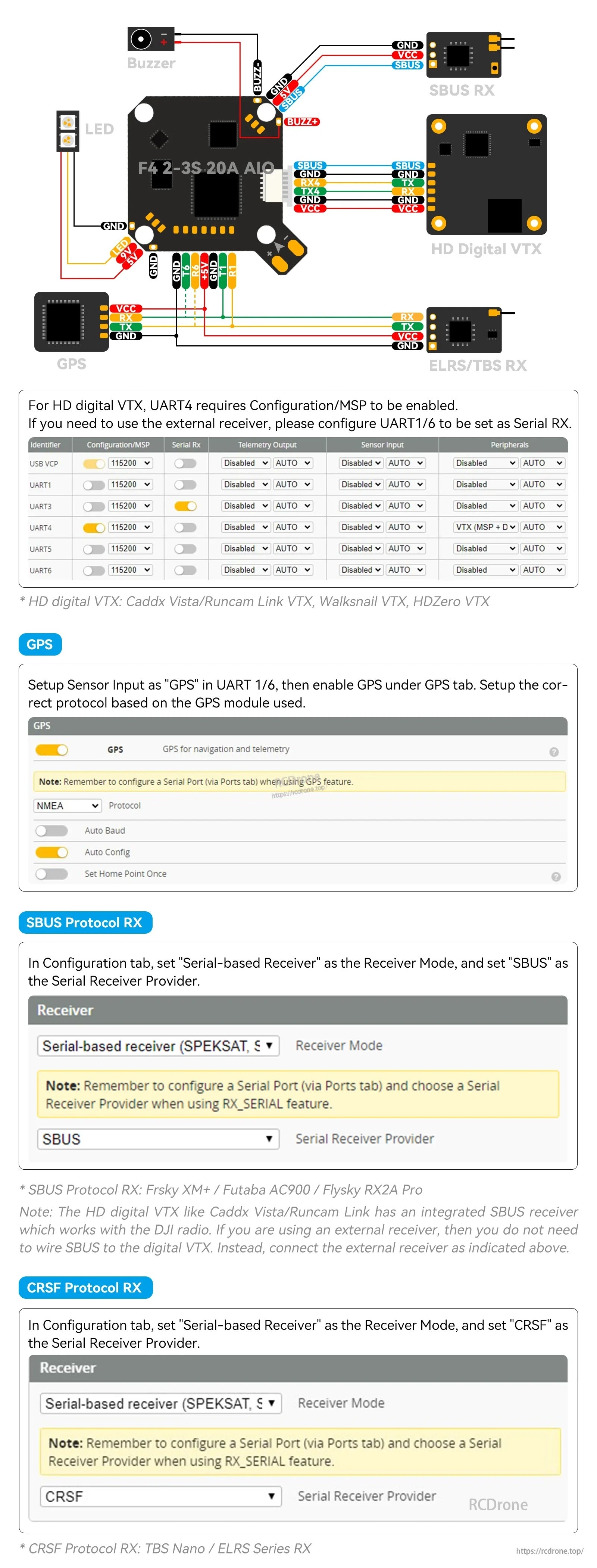
Un exemple de câblage et un guide des paramètres du récepteur Betaflight simplifient la configuration pour les constructions de VTX numériques et la configuration du récepteur série.

Related Collections


