Kit de développement de drones programmables Raspberry Pi F450-4B - Plateformes de drones industrielles open source Pixhawk DIY Ardupilot
Kit de développement de drones programmables Raspberry Pi F450-4B - Plateformes de drones industrielles open source Pixhawk DIY Ardupilot
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
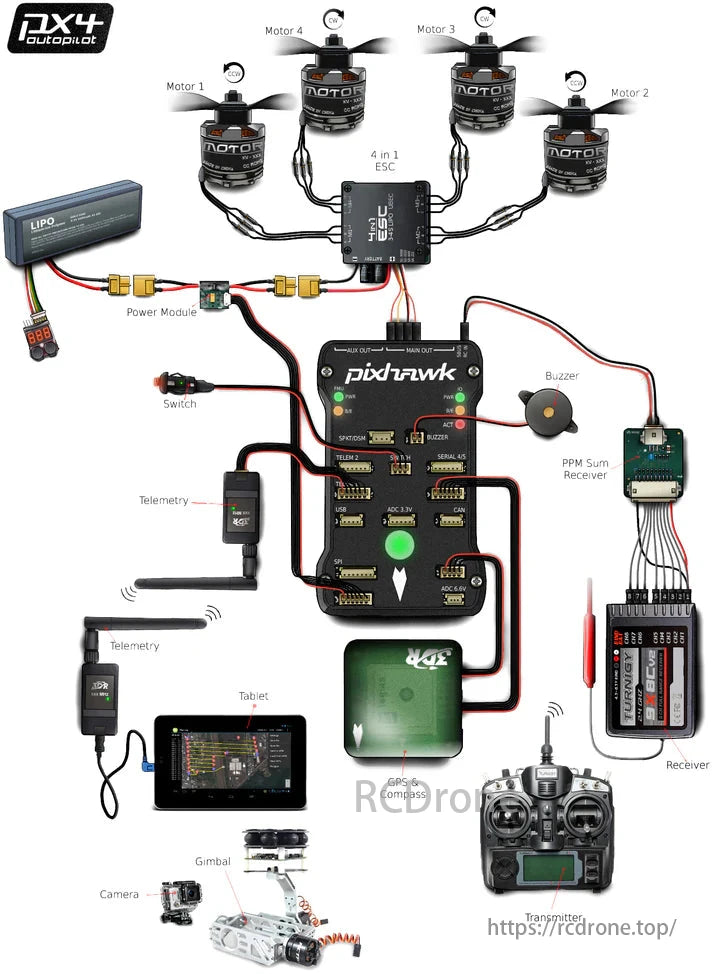
Le F450-4B Drone Raspberry Pi est un avancé Kit de drone à monter soi-même qui combine un puissant Raspberry Pi 4B ordinateur de bord avec la polyvalence Contrôleur de vol Pixhawk 2.4.8, ce qui en fait un outil hautement personnalisable et drone programmable plate-forme. Ceci Plateforme de drones open source prend en charge des outils de pointe tels que Kit de drones en Python, permettant aux développeurs de créer des missions autonomes, une transmission de données en temps réel et des applications de traitement d'images alimentées par l'IA. Avec un cadre robuste de 450 mm, une caméra HD de 200 MP, une batterie 3S 5200 mAh pour jusqu'à 20 minutes de vol et des modes de vol avancés comme le maintien de l'altitude, le retour à la maison et le mode cercle, le kit de drone F450 est le choix idéal pour les passionnés, les chercheurs et les éducateurs à la recherche d'une expérience de développement de drone innovante.
Caractéristiques principales
Matériel haute performance
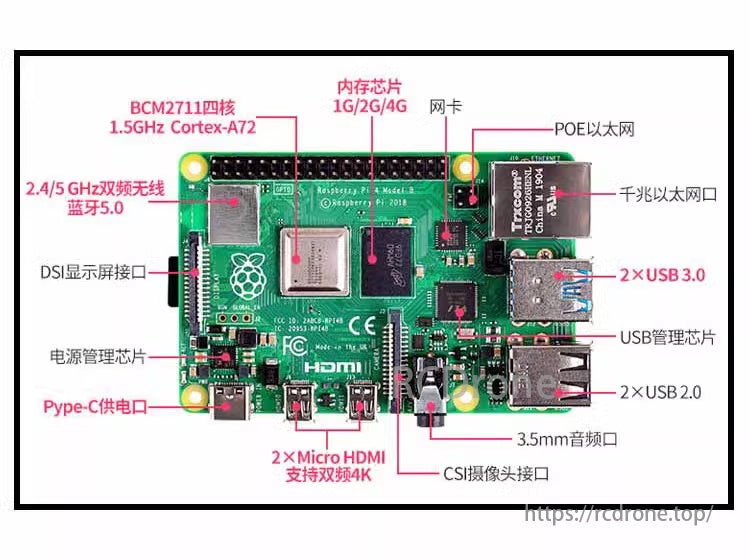
- Raspberry Pi 4B:Alimenté par un processeur quad-core 64 bits à 1,5 GHz, prenant en charge la sortie vidéo 4K et la communication WiFi haut débit pour un fonctionnement fiable.
- Contrôleur de vol Pixhawk 2.4.8:Équipé de plusieurs capteurs intégrés, assurant un contrôle précis de l'attitude, du vol stationnaire et de la planification de la mission.
- Prise en charge de l'extension de la vision:Associé à une caméra monoculaire et aux outils OpenCV, ce kit répond aux besoins de transmission et de traitement d'images en temps réel.
Différents modes de vol
- Maintien de l'altitude (AltHold):Maintient une altitude de vol stable.
- Flotter: Fournit un vol stationnaire précis.
- Retour à l'accueil (Retour):Retourne automatiquement au point de départ en cas de perte de signal ou de batterie faible.
- Atterrissage (Terre):Exécute un atterrissage autonome en douceur.
- Mode de stabilisation:Ajuste automatiquement l'attitude de vol.
- Mode Cercle:Effectue des vols circulaires autour d'une cible.
- Mode sans tête:Supprime les contraintes directionnelles pour un contrôle plus facile.
- Retour hors de contrôle:Retourne à un emplacement prédéfini lorsque le signal est perdu.
- Atterrissage à faible puissance:Atterrit en toute sécurité dans des conditions de batterie faible.
Transmission de données et traitement d'images
- Établit un réseau WiFi local via un point d'accès intégré sans nécessiter de routeurs externes, permettant la transmission de données et d'images en temps réel.
- Prend en charge le streaming et l'analyse vidéo basés sur OpenCV, idéal pour la surveillance d'images et les applications intelligentes.
Caractéristiques
Paramètres du drone
| Paramètre | Détails |
|---|---|
| Nom | Kit drone F450 |
| Empattement | 450 mm |
| Poids | 1493g (avec batterie et Raspberry Pi 4B) |
| Contrôleur de vol | Pixhawk 2.4.8 contrôleurs de vol open source |
| Ordinateur de bord | Raspberry Pi 4B |
| Caméra | 200MP HD 1080P |
| Assistance en vol stationnaire | Module de flux optique et capteur de distance laser |
| Module GPS | GPS m8n |
| Durée du vol | ~20 minutes (selon l'environnement et la mission) |
| Batterie | 3S 5200mAh (11,1V) |
| Capacité de charge utile | 500g |
| Résistance au vent | Niveau 3-4 |
| Moteur | SunnySky A2212 |
| ÉCHAP | ESC Hobbywing 20A (prend en charge les batteries LiPo 3S-4S) |
| Hélices | Hélices autobloquantes T1045 |
| Altitude maximale | 2000 m (sans interférence) |
| Portée de vol | 1000 m |
| Scénarios de vol | Intérieur / Extérieur |
Spécifications du contrôleur de vol Pixhawk 2.4.8
- Processeur: ARM STM32F427 Cortex M4 32 bits, 168 MHz, 256 Ko de RAM
- Capteurs:
- Gyroscope 3 axes 6DOF L3GD20
- Accéléromètre/magnétomètre 3 axes 14 bits LSM303D
- Accéléromètre/magnétomètre 6 axes MPU6000
- Baromètre de haute précision MS5611
- Compatibilité du contrôle au sol: QGroundControl, Planificateur de mission
- Dimensions: 81 mm x 47 mm x 16 mm ; Poids : 37 g
Spécifications du Raspberry Pi 4B
- Jeu de puces: Broadcom BCM2711
- Processeur: 64 bits 1,5 GHz quad-core
- GPU:VidéoCore VI 500 MHz
- BÉLIER: 4 Go DDR4
- Interfaces: 2 x USB 3.0, 2 x USB 2.0
- Sortie vidéo: Deux ports micro HDMI, prend en charge 4K@60Hz
- Communication: Bluetooth 5.0, Wi-Fi 5 (2,4/5 GHz)
- Alimentation électrique:USB Type-C (5V 3A)
Le forfait comprend
Configuration 1 : Moteur SunnySky A2212 avec télécommande et télémétrie FlySky i6
- Châssis F450 avec train d'atterrissage
- Moteurs SunnySky A2212 (4 pièces)
- Contrôleurs de vitesse Hobbywing 20A (4 pièces)
- Hélices autobloquantes T1045 (4 paires)
- Module GPS PIX M8n
- Plaque anti-vibratoire
- Télécommande FlySky i6
- Batterie 3S 5200mAh
- Chargeur d'équilibre B3
- Support GPS
- Module de télémétrie de tension FS

Compris: Sangles de batterie, serre-câbles en nylon, patins en bois, ruban adhésif 3M, buzzer, outils d'installation
Vidéos d'assemblage et de débogage, documents associés fournis ; contactez le service client pour le code source.
Configuration 2 : Moteur SunnySky A2212 avec Radiolink PRO
- Châssis F450 avec train d'atterrissage
- Moteurs SunnySky A2212 (4 pièces)
- Contrôleurs de vitesse Hobbywing 20A (4 pièces)
- 9450 hélices autobloquantes (3 paires)
- PIX.Kit module GPS M8n
- Plaque anti-vibratoire
- Radiolink PRO (récepteur R9DS)
- Batterie de contrôle 3S 2200mAh
- Batterie 3S 5200mAh
- Chargeur d'équilibre B3
- Support GPS

Compris: Sangles de batterie, serre-câbles en nylon, patins en bois, ruban adhésif 3M, buzzer, outils d'installation
Vidéos d'assemblage et de débogage, documents associés fournis ; contactez le service client pour le code source.
Kit d'assemblage de drone F450
Scénarios d'application
Le kit de développement de drone F450-4B est idéal pour :
- Recherche et développement sur les drones:Recherche universitaire, tests de contrôleurs de vol, développement d'algorithmes.
- Applications intelligentes:Planification d'itinéraire, reconnaissance de cible et évitement d'obstacles.
- Expériences éducatives:Programmation, assemblage de matériel et débogage.
- Utilisation sur le terrain:Vol stationnaire en intérieur, surveillance en extérieur, surveillance agricole et bien plus encore.
Détails
Plateforme de développement de drone Raspberry Pi F450-4B
Le F450 est un modèle de drone classique et couramment utilisé, offrant un assemblage simple et pratique, des performances à coût élevé, une grande praticité et une adéquation aux débutants pour démarrer rapidement les opérations de drones.

Mise à niveau du Raspberry Pi 4B
La puissance de traitement matérielle du Raspberry Pi 4B est nettement supérieure à celle du 3B+.
Le Raspberry Pi est équipé du dernier système open source Ubuntu 20.04, offrant une expérience plus fluide par rapport au système Ubuntu Mate.

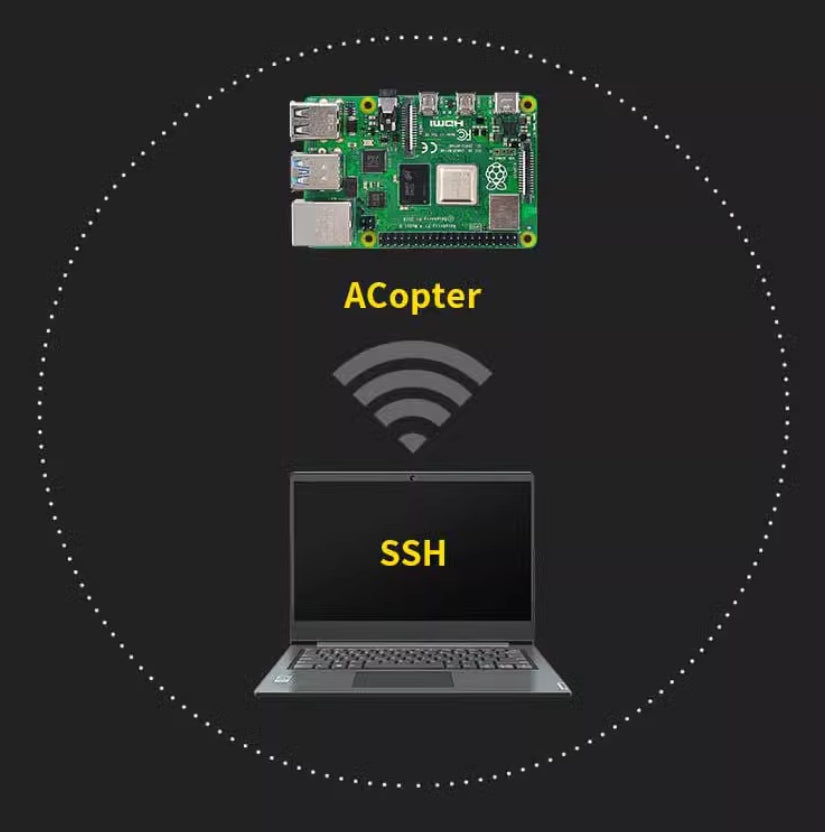
Point d'accès Wi-Fi activé par le système (Acopter)
Grâce à la fonctionnalité WiFi du Raspberry Pi 4B, un point d'accès auto-construit (Acopter) est créé. Le PC peut se connecter directement au point d'accès WiFi du 4B pour former un réseau local et utiliser les commandes SSH pour accéder à distance au Raspberry Pi. Contrairement au modèle 3B+ qui nécessite un routeur pour la configuration du réseau, cette configuration est beaucoup plus simple et plus conviviale pour les débutants.
Traitement visuel OpenCV
Une caméra monoculaire est ajoutée, permettant la transmission et le post-traitement des images. Les flux vidéo peuvent être capturés via le Raspberry Pi et traités à l'aide d'outils comme OpenCV. Les flux vidéo HD en temps réel peuvent également être retransmis vers un PC pour traitement ou vers un appareil mobile pour visualisation.

Interface d'extension supplémentaire
Le Raspberry Pi 4B offre une large gamme d'interfaces d'extension, notamment deux ports USB 3.0, deux ports micro HDMI 4K, des interfaces CSI et DSI, Ethernet Gigabit et une alimentation de type C, offrant une polyvalence exceptionnelle pour diverses applications.
Édition à caméra unique
L'édition à caméra unique comprend un Raspberry Pi 4B et une caméra monoculaire, permettant la communication via un port série avec le contrôleur de vol. Elle prend en charge des tâches telles que le traitement visuel, la programmation Python et la communication. Cette version convient aux utilisateurs ayant une expérience préalable de Pixhawk, des connaissances de base sur Ubuntu (Linux), OpenCV, Raspberry Pi et la communication sur réseau local.
En plus des fonctionnalités de base, l'édition à caméra unique prend en charge la transmission d'images et de données via WiFi et permet le contrôle du drone via Kit de drones en Python programmation.

Positionnement du flux optique
Contrôle du vol stationnaire en intérieur avec Dronekit-python dans des conditions de positionnement par flux optique

Cette plate-forme de développement de drones prend en charge ROS, Programmation Python, Reconnaissance d'images OpenCV, Transmission longue distance 4G, et Atterrissage guidé visuel avec code Aruco 2D, ce qui le rend très polyvalent et innovant.

Télécommande FlySky i6
Équipé d'un récepteur ia6b préchargé avec un firmware à 10 canaux, d'un module de télémétrie de tension et d'une portée de télécommande de plus de 1000 m, idéal pour les débutants pour apprendre et s'entraîner.

Télécommande Radiolink AT9S
Dispose de 10 canaux avec une portée de contrôle de plus de 2000 m. Équipé d'un module de télémétrie qui fournit des données sur la tension de la batterie, le nombre de satellites GPS, l'altitude de vol, les coordonnées, le mode de vol, etc.

FAQ
1. Puis-je effectuer un développement secondaire ? Puis-je programmer de manière indépendante ?
La réponse est oui. Comme indiqué précédemment, Ardupilot est actuellement le système de contrôle de vol open source le plus utilisé, et de nombreux excellents modèles de drones nationaux et internationaux sont développés sur la base de ce système.
Le développement secondaire a principalement deux directions : le développement du contrôle de vol et l'expansion externe.
- Développement des commandes de vol
Nous utilisons Ardupilot, donc l'apprentissage du développement de commandes de vol open source implique principalement l'étude du projet open source Ardupilot.
- De solides compétences en programmation sont requises (le code source est en C++), ainsi que des connaissances en mathématiques avancées (mathématiques discrètes, itération, linéarisation), en filtrage de Kalman et en développement embarqué.
- Une base théorique solide est nécessaire. Cela vous prépare à travailler sur le développement de systèmes sans pilote et sur la recherche et le développement de commandes de vol.
Si vous souhaitez vous concentrer sur le développement des commandes de vol, la majeure partie du travail doit être effectuée sur votre ordinateur :
- Mise en place de l'environnement de programmation, téléchargement du code source du contrôle de vol, étude de son architecture et de ses modules fonctionnels, etc.
- Une fois familiarisé avec le cadre de code, vous pouvez commencer à programmer en vous basant sur le code existant.
Commencez avec un modèle de contrôle de vol de base et reportez-vous au manuel de contrôle de vol Ardupilot que nous fournissons pour vous guider.
- Développement d'expansion externe
L'extension externe vous permet d'ajouter des périphériques externes en fonction de vos tâches et scénarios via les interfaces réservées du contrôleur de vol. Par exemple :
- Ajoutez un module de flux optique pour le positionnement et le survol en intérieur.
- Ajoutez un radar laser pour éviter les obstacles.
- Utilisez la télémétrie pour permettre une planification autonome des vols et des itinéraires.
- Installez un ordinateur embarqué (par exemple, Raspberry Pi) et utilisez Dronekit-Python ou ROS pour programmer le contrôle du drone.
L’objectif de l’ajout d’un ordinateur de bord est de gérer des tâches plus complexes, telles que :
- Utilisation de la caméra Raspberry Pi pour la reconnaissance visuelle (nécessite OpenCV, YOLO, etc.).
- Combinaison de protocoles de communication pour contrôler le vol du drone.
- Transmission de données de vol ou de vidéos haute définition via des réseaux.
Ces fonctions ne peuvent pas être réalisées uniquement en s’appuyant sur le contrôleur de vol.
L’étude de l’expansion externe se concentre principalement sur les applications, ce qui est également l’orientation de la plupart des concours à l’échelle nationale.Après avoir appris, vous pourrez explorer les domaines critiques des drones intelligents, tels que la reconnaissance visuelle, l'intégration de l'IA avec les drones, etc.
2. Quelles sont les conditions préalables au développement indépendant ?
L'apprentissage des drones est un processus progressif. Les systèmes de drones sont interdisciplinaires et intégratifs, impliquant un large éventail de domaines de connaissances. Pour apprendre le développement de drones, les bases suivantes sont nécessaires :
- Compétences pratiques de base, y compris la maîtrise de l’utilisation de fers à souder, de divers tournevis et d’autres outils.
- Connaissances de base de l'électronique : concepts tels que la tension, le courant, la puissance, la polarité et les signaux.
- Connaissances fondamentales du contrôle des automatismes : régulation PID, rétroaction, signaux numériques, signaux analogiques, etc.
- Compétences informatiques de base : pilotes, ports série, débits en bauds, versions de micrologiciels, versions de logiciels.
- Connaissances de base des drones Pixhawk.
- Connaissances de base du système d'exploitation Ubuntu.
- Maîtrise des langages de programmation : tels que C++ et Python.
Comment fabriquer un drone Respberry PI ?