ST-3046-C001 est un servo intelligent de bus série 6V 40kg, adopte un boîtier entièrement en alliage d'aluminium, un moteur sans noyau, une boîte de vitesses en acier, un moteur sans noyau, Feetech a auto-recherché et développé une carte de commande TTL, 12 Capteur de codage magnétique de haute précision. Le couple de décrochage est de 40 kg.cm, peut indiquer la position, la vitesse, la tension, le courant, la température et les paramètres de charge, ainsi une protection contre les surcharges et les surintensités peut être réalisée. Il convient aux applications dans les scénarios d'application d'équipements industriels, de robots et de transmissions.
SKU : STS3046
Nom du produit : 7,4 V 40 KG.CM Boîtier en plastique Encodeur magnétique à engrenages métalliques à arbre unique Servo de bus série TTL
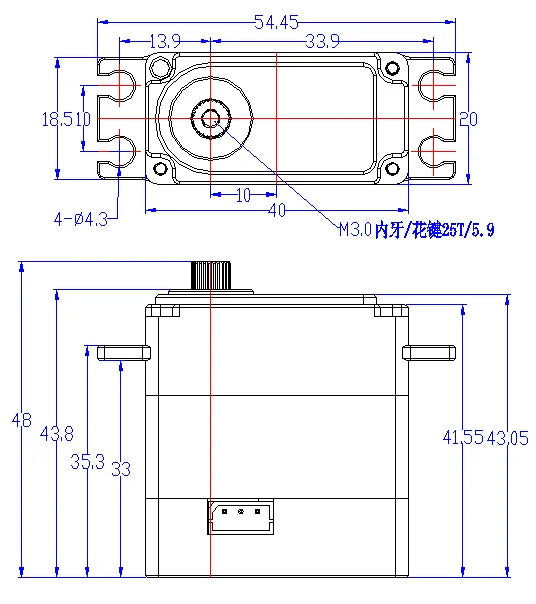
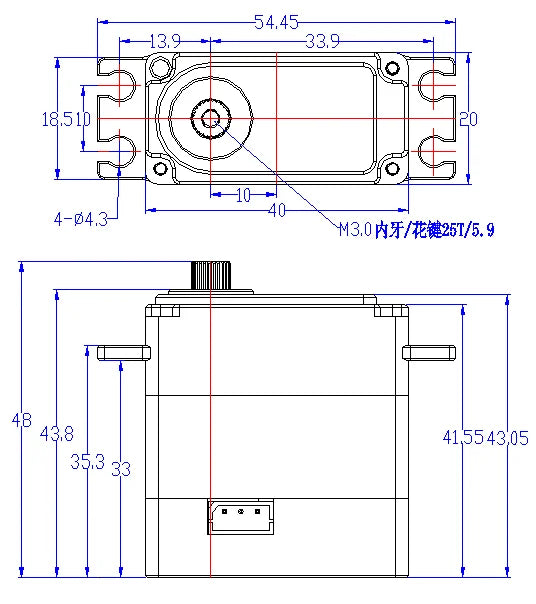
Taille d'apparence : 45,2 X 24,7 X 35 mm (voir le plan)
Couple de décrochage : [email protected]
Vitesse de décrochage :[email protected]
Rétroaction : charge/position/vitesse/tension/courant/température
Protection électronique : surchauffe/surintensité/surtension/protection contre les surcharges




Caractéristiques structurelles :
La coque adopte une coque en plastique technique avec une résistance plus élevée, optimise l'entraxe, une structure globale plus compacte, l'engrenage servo adopte une combinaison d'engrenages en cuivre 1:345, un couple plus élevé ; au même couple , comparer avec la taille standard du servo, il semble profil inférieur (5mm), le corps adopte une conception de structure à double axe, les caractéristiques structurelles du solide doublé de cercle, le mode de câblage des câbles doubles sortants avec des cornes de servo adjointes principales en métal, il convient pour application dans un robot quadrupède, un robot serpent, un robot de bureau, un robot humanoïde et un bras mécanique.
Fonction de contrôle électronique :
1. Fonction d'arrêt et de démarrage d'accélération : la vitesse et la valeur d'accélération peuvent être réglées, l'effet de mouvement est plus doux.
2.Haute précision, position absolue à 360 degrés, précision de 4096 bits, la résolution de position la plus élevée est de 0,088 degrés, si le contrôle est de 90 degrés, entrez 4096/360 * 90 = 1024, si le contrôle est de 180 degrés, entrez 4096/360 * 180 = 2048. , afin de calculer.
3. Il existe quatre modes de commutation (mode 0 position servo, mode 1 vitesse en boucle fermée, mode 2 vitesses en boucle ouverte, mode 3 pas servo).
1)、Mode 0:Mode de localisation, le mode par défaut. Dans ce mode, un contrôle d'angle absolu à 360 degrés peut être réalisé. Prend en charge le mouvement d'accélération.
2)、Mode 1 : vitesse en boucle fermée, dans l'interface de programmation, le mode de fonctionnement est réglé sur 1, passez en mode vitesse en boucle fermée et entrez la vitesse correspondante dans la colonne de vitesse pour exécuter .
3)、Mode 2 : boucle ouverte de vitesse, dans l'interface de programmation, le mode de fonctionnement est réglé sur 2, passez en mode boucle ouverte de vitesse et entrez le temps correspondant dans la colonne de temps pour exécuter.
4)、Mode3:Mode étape : dans l'interface de programmation, la limite d'angle maximum/minimum est réglée sur 0 et le mode de fonctionnement est réglé sur 3. Passez en mode étape. Entrez la position dans la barre de position pour avancer vers la position cible. Cliquez à nouveau sur la position pour continuer à avancer dans la même direction.
4. Mode multi-tours, contrôle absolu et retour à 360 degrés, avec la plus haute précision, le contrôle de position absolu peut être de plus ou moins 7 tours, mais le nombre de cycles d'alimentation n'est pas enregistré, seule la valeur absolue du retour de position est conservée.
5. Calibrage à une clé, installation à un angle de 360 degrés dans n'importe quelle position, (entrée d'adresse 40 (décimale) 128 (décimal)) une position actuelle de correction clé est le milieu (2048 (décimal)).
6, niveau de communication TTL, communication asynchrone semi-duplex, prise en charge du protocole de bus pour ajuster les paramètres de lecture et d'écriture et ajout d'une fonction de lecture synchrone (envoyer un Instruction pour recevoir l'instruction de relecture de chaque servo sur le bus à tour de rôle.)
7. Protections multiples (surcharge, surintensité, surtension, surchauffe, réglage du commutateur, changement des paramètres de condition)
1) 、 Protection contre les surcharges : grâce à la détection de position, pendant le mouvement de la position de départ à la position cible, lorsqu'il est détecté que la position actuelle n'est pas la position cible après avoir rencontré le blocage d'obstacles, la force de déchargement dure 2 S (20 % de la force de blocage par défaut). Jusqu'à ce qu'une nouvelle commande soit déclenchée, relâchez la protection
2)、Protection contre les surintensités : via la valeur de courant définie, vérifiez si le courant atteint la valeur de courant définie. Lorsqu'il atteint la valeur actuelle définie, relâchez la force (le couple par défaut est 0). Jusqu'à ce qu'une nouvelle commande soit déclenchée, relâchez la protection
3) 、 Protection contre les surtensions : détectez la valeur de tension actuelle. Si elle dépasse la valeur de tension définie, l'alarme affichera une surtension.
4) 、 Protection contre la surchauffe : détecte la température actuelle du moteur. Si la température dépasse la valeur définie, l'alarme affichera une surchauffe.
8 : retours multiples :
1) retour de charge : la sortie de contrôle de courant pilote le cycle de service de tension du moteur, et la pleine échelle est de 1000 = 100 % de sortie de couple.
2) Retour de courant : le courant de fonctionnement du servo, 1 = 6,5 mA
3) Retour de tension : la tension de fonctionnement du servo, 70 = 7 V, 0,1 V
4) Retour de température : température de fonctionnement interne du servo actuel (température de mesure)

Nos services : Nous proposons des solutions personnalisées à guichet unique pour la fabrication de conception originale (ODM) et la fabrication d'équipement d'origine (OEM). Nos capacités incluent la conception électronique, la conception structurelle et la production.De plus, nous fournissons des services de personnalisation pour des produits tels que des servos dotés de fonctionnalités telles que PWM, RS485, fonctionnement 3 V-24 V et commande de roue à retour 0-360°.
Spécialisé dans l'ODM, l'OEM et la fabrication sur mesure 1. Votre étiquette ou impression de logo
2. Fil servo
3.Emballage : sac PE, boîte de couleur, boîte en plastique avec
votre logo
4.Connecteur de câble
5.Personnalisé Divers servos à tension de fonctionnement large
9、Ouvrir les paramètres PID.
Nos produits ont passé les certifications CE et ROHS, et la plupart d'entre eux ont déposé des demandes de brevets d'apparence et de modèles d'utilité
Nos produits ont obtenu les certifications « CE », « RoHS » et « REACH ». De plus, nous détenons des brevets d'apparence et des brevets de modèle pour nos conceptions.