






GTSKYTENRC Tracker 2807 1300KV / 1700KV MOTEUR FPV sans balais pour 7 ″ ″ ″ Mark4 Apex Freestyle et drones à longue portée
GTSKYTENRC Tracker 2807 1300KV / 1700KV MOTEUR FPV sans balais pour 7 ″ ″ ″ Mark4 Apex Freestyle et drones à longue portée
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
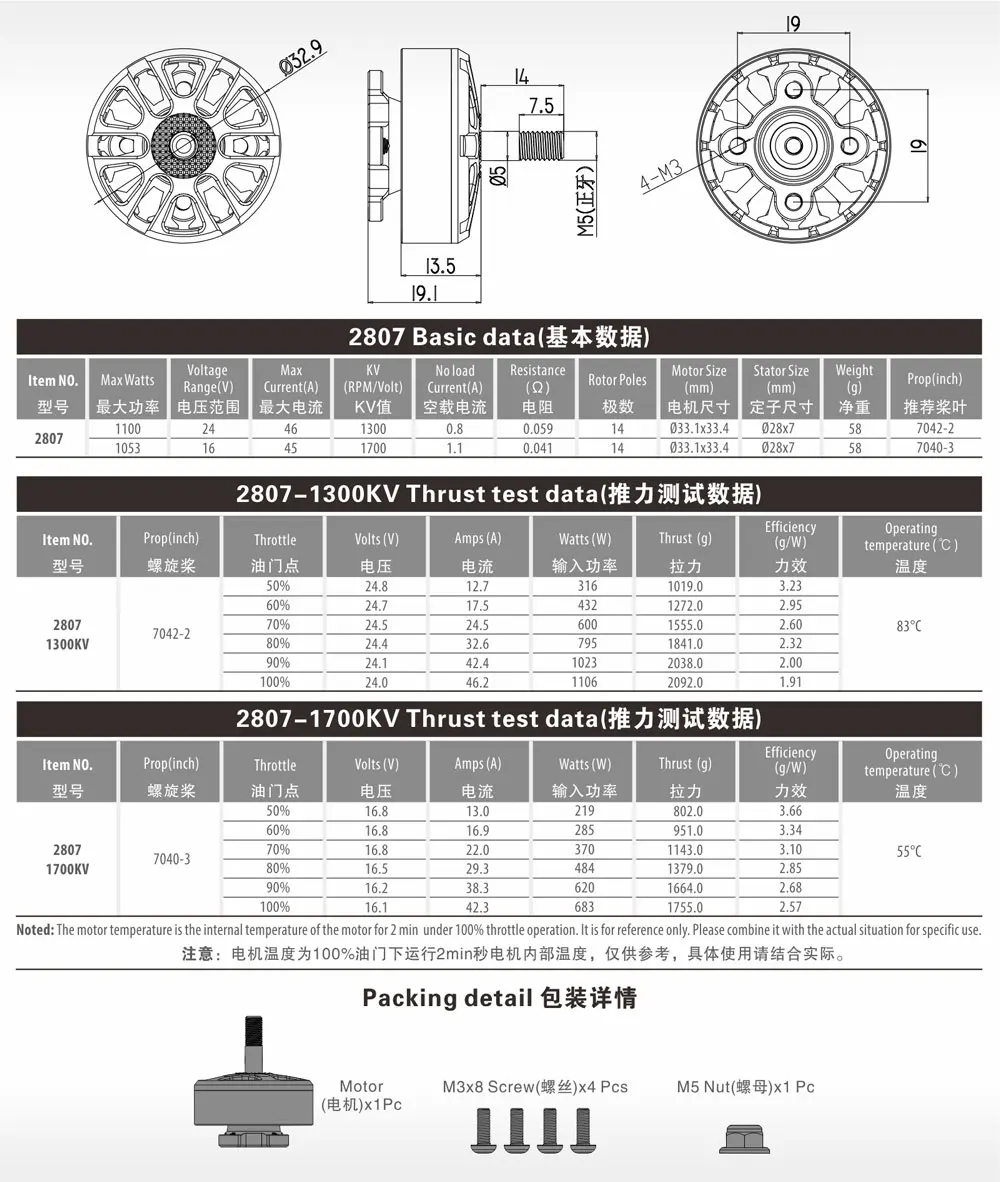
La série GTSKYTENRC Tracker 2807 propose deux options de KV : 1 300 kV pour une poussée et une efficacité maximales, ou 1 700 kV pour une réponse plus vive de l'accélérateur, sur un bobinage 12N14P robuste. Conçus pour les configurations LiPo 4S à 6S, ces moteurs délivrent jusqu'à 1 400 W (1 300 kV) ou 900 W (1 700 kV) de puissance continue, ce qui les rend parfaits pour les plateformes freestyle Mark4 APEX de 7 à 8 pouces et les configurations LR7 longue portée. Un arbre en acier de précision de 4 mm et un boîtier en aluminium léger de 33,5 × 17,5 mm garantissent une maniabilité réactive et une dissipation thermique fiable sous fortes charges.
Caractéristiques principales
-
Options KV doubles:
-
1300KV : 1 400 W max (6S) pour une poussée et une efficacité élevées (60 mΩ)
-
1700KV : 900 W max (6 s) pour une mise en marche rapide et un contrôle agile (45 mΩ)
-
-
Large plage de tension:Optimisé pour les batteries LiPo 4S–6S
-
Conception légère: ~48 g sans câbles en silicone
-
Construction de précision: stator à 12 fentes et 14 pôles ; arbre en acier trempé de 4 mm
-
Gestion des courants élevés:Jusqu'à 55 A crête sur 6S
Caractéristiques
| Paramètre | 2807-1300KV | 2807-1700KV |
|---|---|---|
| Cote KV | 1 300 KV | 1 700 kV |
| Cellules LiPo | 4 – 6S | 3 – 6S |
| Puissance max. (6S) | 1 400 W | 900 W |
| Courant de crête (6S) | 55 A | 55 A |
| Résistance interne | 60 mΩ | 45 mΩ |
| Courant à vide (10 V) | 1 A | 1,9 A |
| Dimensions du moteur | 33,5 × 17,5 mm | 33,5 × 17,5 mm |
| Stator/enroulement | 12N14P | 12N14P |
| Diamètre de l'arbre | 4 mm | 4 mm |
| Taille de l'hélice | 6″ – 7″ | 6″ – 7″ |
| Plomb | 18 AWG, 200 mm | 18 AWG, 200 mm |
| Poids (sans fils) | 48,6 g | 47,9 g |
Emballage inclus
-
4 moteurs FPV sans balais GTSKYTENRC Tracker 2807 (1 300 kV/1 700 kV)






Related Collections







