Pilote automatique de contrôleur de vol HEX Pixhawk 2.1 PX4 PIX 32 bits - Le Cube Orange + ensemble standard avec ici 3 cartes de transport GPS et ADS-B
Pilote automatique de contrôleur de vol HEX Pixhawk 2.1 PX4 PIX 32 bits - Le Cube Orange + ensemble standard avec ici 3 cartes de transport GPS et ADS-B
RCDrone
Impossible de charger la disponibilité du service de retrait
SPÉCIFICATIONS
Empattement : Vis
Utilisation : Véhicules et jouets télécommandés
Pièces/accessoires de mise à niveau : Bras
Fournitures d'outils : Classe assemblée
Paramètres techniques : Valeur 2
Taille : 1
Périphériques/appareils de télécommande : Servos
Âge recommandé : 12+y
RC Pièces et accessoires : Servos
Quantité : 1 pièce
Origine : Chine continentale
Numéro de modèle : HEX-CUBE+
Matériau : Métal
Attributs des quatre roues motrices : Assemblage
Pour le type de véhicule : Voitures
Certification : CE
Nom de marque : Feetech
Veuillez noter : La différence entre Cube Orange et Cube Orange+ est que Cube Orange peut être mis à niveau vers le micrologiciel PX4, tandis que Cube Orange+ ne prend pas en charge la mise à niveau du micrologiciel PX4
Pour plus d'informations, veuillez visiter le site officiel :https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Fonctionnalités
- Prend en charge plusieurs modes tels que le flânage, le maintien d'altitude, le mode (avec waypoints), le mode de suivi, etc.
- Prend en charge le planificateur de mission et les stations de contrôle au sol QGroundControl
- Vol intégré enregistrement
- Transmission des données de vol en temps réel
- Prend en charge l'évitement d'objets à 360 degrés
- Équipé d'un processeur H7 hautes performances
Le H7 a une double- Le FPU de précision (DP), 1 Mo de RAM et le processeur CPU de 400 MHz offrent des performances élevées, un fonctionnement extrêmement rapide et une solution stable pour le vol.
- Connaissance de la situation grâce à l'ADS-B intégré
Un 1 090 MHz personnalisé Le récepteur ADS-B d'uAvionix a été intégré à la nouvelle carte porteuse ADS-B. Cela fournit une nouvelle fonction sans incrément de taille. Les drones équipés de la nouvelle carte porte-avions peuvent recevoir l'attitude des avions commerciaux pilotés dans la portée de l'ADS-B. Cela informe efficacement l'opérateur d'UAS pour lui permettre d'évaluer les risques liés à son fonctionnement actuel.
Commutation facile de la tension du signal de sortie PWM
La sortie PWM prend en charge la commutation entre les niveaux de signal 3,3 V et 5 V. La commutation de tension peut être effectuée par le logiciel de la station de contrôle au sol. Cela améliore la compatibilité avec divers périphériques externes.
Prise en charge de plusieurs types de véhicules : y compris hélicoptère, multicoptère, voilure fixe, VTOL, Rover, bateau, sous-marin, etc.
Détails du produit
Processeur principal:STM32H757(La nouvelle puce a de bonnes performances)
Coprocesseur:STM32F1
Signaux RC pris en charge:PPM/SBUS/DSM
Redondance d'alimentation:Triple redondance
Capteurs:Triple Système IMU
Détails des capteurs : ICM20649 (accéléromètre+gyroscope intégré)
ICM20602 (accéléromètre+gyroscope intégré)
ICM20948 (accéléromètre+gyroscope+magnétomètre intégré)
MS5611 x 2 (Baro)
Firmware : Non pris en charge par le micrologiciel du contrôleur de vol open source PX4
Types de véhicules pris en charge : avions à voilure fixe, hélicoptères avec 3 à 8 moteurs, hélicoptères, avions VTOL, rovers/bateaux/sous-marins
Poids : 73 g
Matériau du châssis : Alliage d'aluminium CNC (cube) + moulage ABS (panneau de support)
Taille du cube : 38,4x38,4x22 mm
Panneau de support : 94,5x44,3x17.3 mm
Température de fonctionnement : -10~+55° IMU avec contrôle de température
E/S PWM : 14
Interface série Mavlink :2
Nombre de GPS pris en charge :2
Interface de débogage :1
Interface I2C : 1
Interface CAN : 2
Ici3
GNSS:Oui
Boussole:Oui
Protocole:CAN
Système d'exploitation en temps réel:Oui
Mise à jour du micrologiciel:Oui
RTK:Oui
Anti-poussière, étanche aux éclaboussures:Oui
Type de récepteur : modules GNSS de haute précision u-blox M8 (M8P)
Constellation satellite : GPS L1C/A, GLONASS L1OF, BeiDou B1I
Précision du positionnement : 3D FIX : 2,5 m / RTK : 0,025 m
Processeur:STM32F302
Capteur IMU:ICM20948
Taux de mise à jour de la navigation:Max 8 Hz
Protocole de communication:CAN
Température de fonctionnement:-40°C à 85°C
Dimension:76 mm x 76 mm x 16,6 mm
Poids : 48,8 g





Le HEX Pixhawk 2.1 de PX4 est le pilote automatique le plus avancé au monde pour les véhicules sans pilote autonomes ouverts. Ce contrôleur en forme de cube comporte des composants redondants, à température contrôlée et isolés.
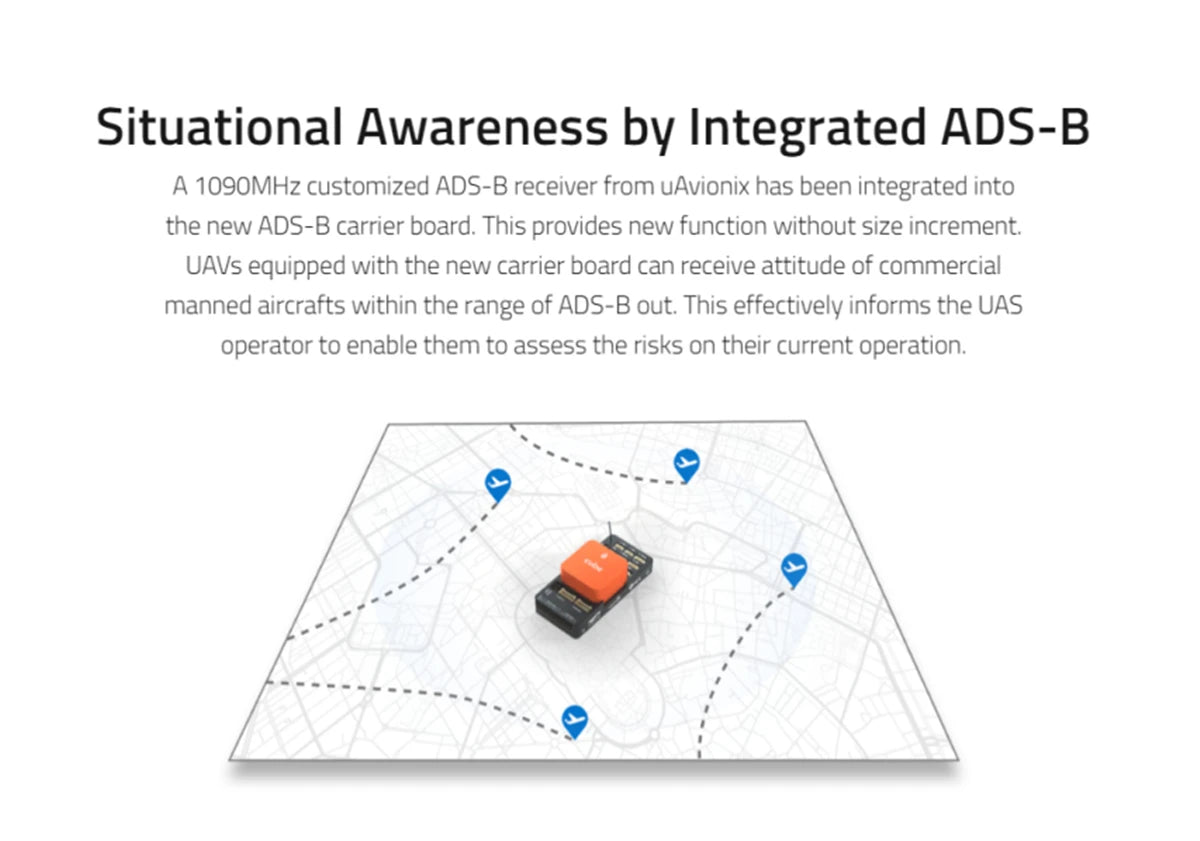
La carte porteuse comprend un récepteur ADS-B personnalisé d'uAvionix, fonctionnant à 1 090 MHz, qui permet aux opérateurs d'UAS d'évaluer les risques potentiels dans leurs opérations actuelles.

La sortie PWM prend en charge la commutation entre les niveaux de signal 3,3 V et 5 V, vous permettant d'utiliser le logiciel de la station de contrôle au sol pour basculer entre ces deux niveaux de tension.
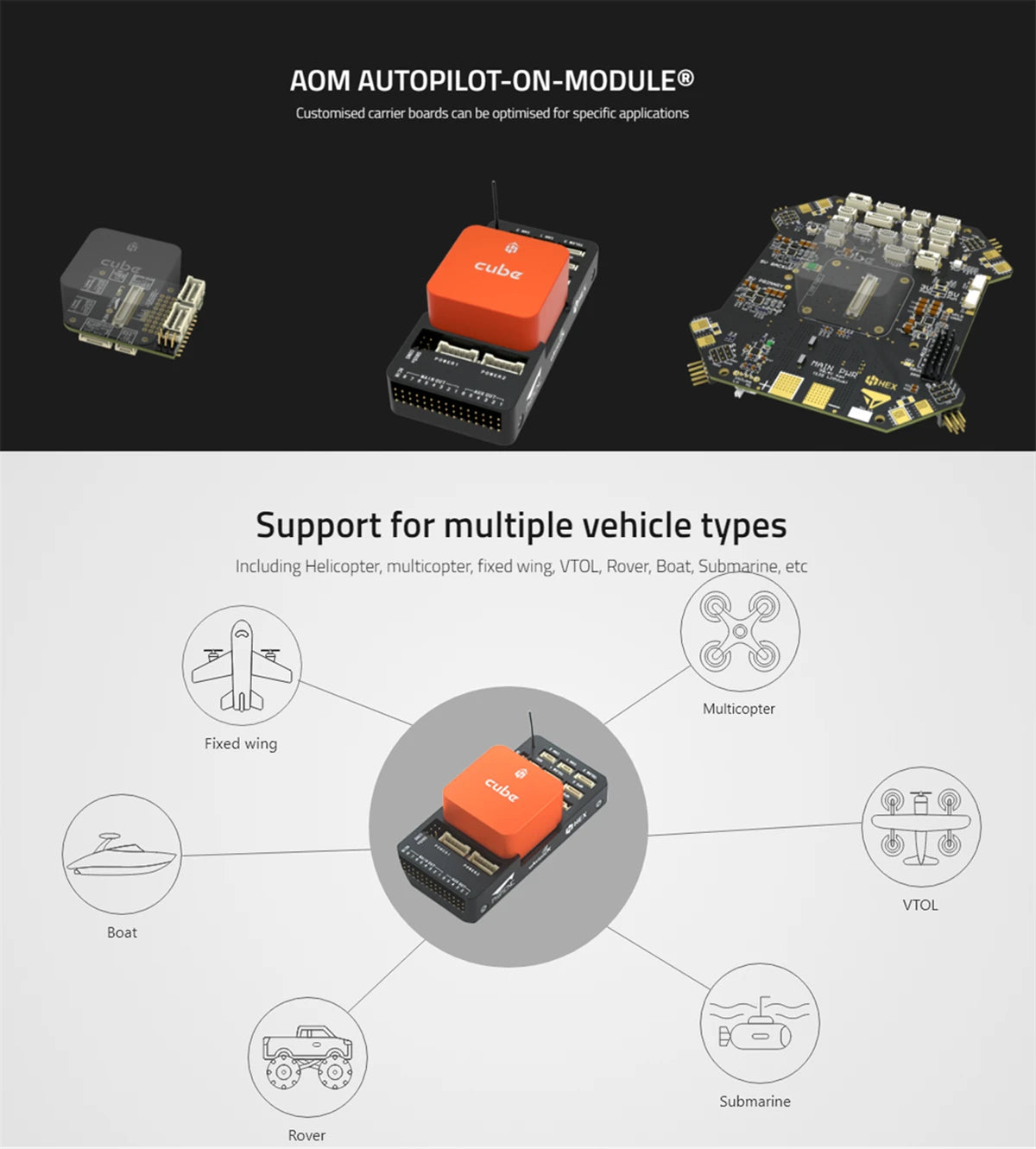
L'APM (Autopilot-on-Module) propose des cartes de support personnalisées qui peuvent être optimisées pour des applications spécifiques, prenant en charge plusieurs types de véhicules, notamment les hélicoptères, les multicoptères, les avions à voilure fixe, les VTOL, les rovers, les bateaux et les sous-marins. , et bien d'autres.
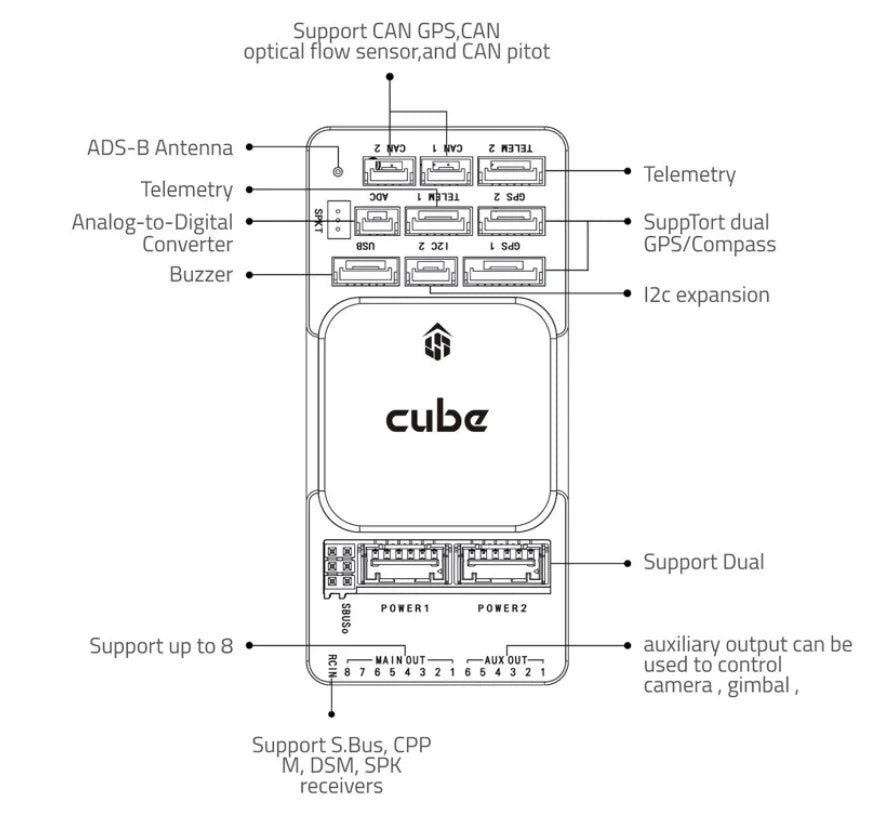
Ce contrôleur de vol prend en charge divers périphériques, notamment : * Bus CAN pour GPS, capteur de débit optique et données Pitot * Antenne ADS-B pour une navigation améliorée * Fonctionnalités de télémétrie avec conversion analogique-numérique SD9 * Capacités d'extension I2C pour des capteurs ou des appareils supplémentaires * Options d'alimentation double pour la redondance * Jusqu'à 8 sorties auxiliaires pouvant être utilisées pour contrôler divers appareils, tels que : + 6 caméras ou cardans via protocole S-Bus

Ce contrôleur de vol présente une conception améliorée avec une résistance à l'eau, ce qui le rend adapté à une utilisation dans divers environnements. De plus, il intègre une puce GNSS de haute précision et économique qui permet des capacités de positionnement précises (remarque : une station de base est requise pour le mode cinématique en temps réel (RTK)).
Related Collections