


MOTEUR HAUT COUPLE HTDW-5047 Module moteur haut couple 50mm 12-48V Encodeur 14 bits Rapport 9/20/36
MOTEUR HAUT COUPLE HTDW-5047 Module moteur haut couple 50mm 12-48V Encodeur 14 bits Rapport 9/20/36
HIGH TORQUE
Impossible de charger la disponibilité du service de retrait
Aperçu
Le HAUT COUPLE moteur HTDW-5047 est une série de modules moteurs compacts à couple élevé, proposée en trois rapports de réduction (9 / 20 / 36). Il dispose d'une résolution d'encodeur d'entrée/sortie de 14 bits, d'une plage de tension de 12-48V et d'une fréquence de contrôle de 3kHz pour le contrôle de mouvement et les articulations de robotique.
Caractéristiques clés
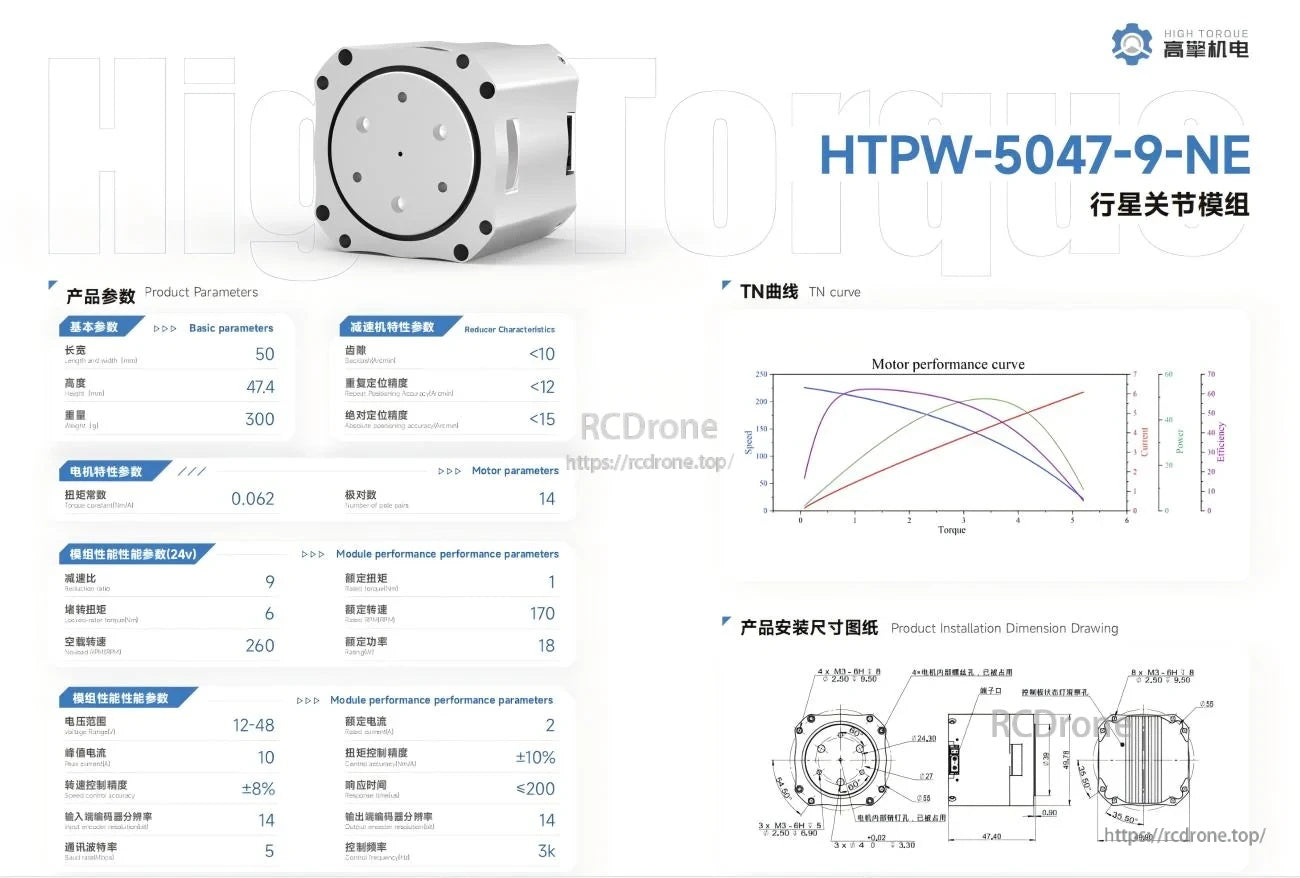
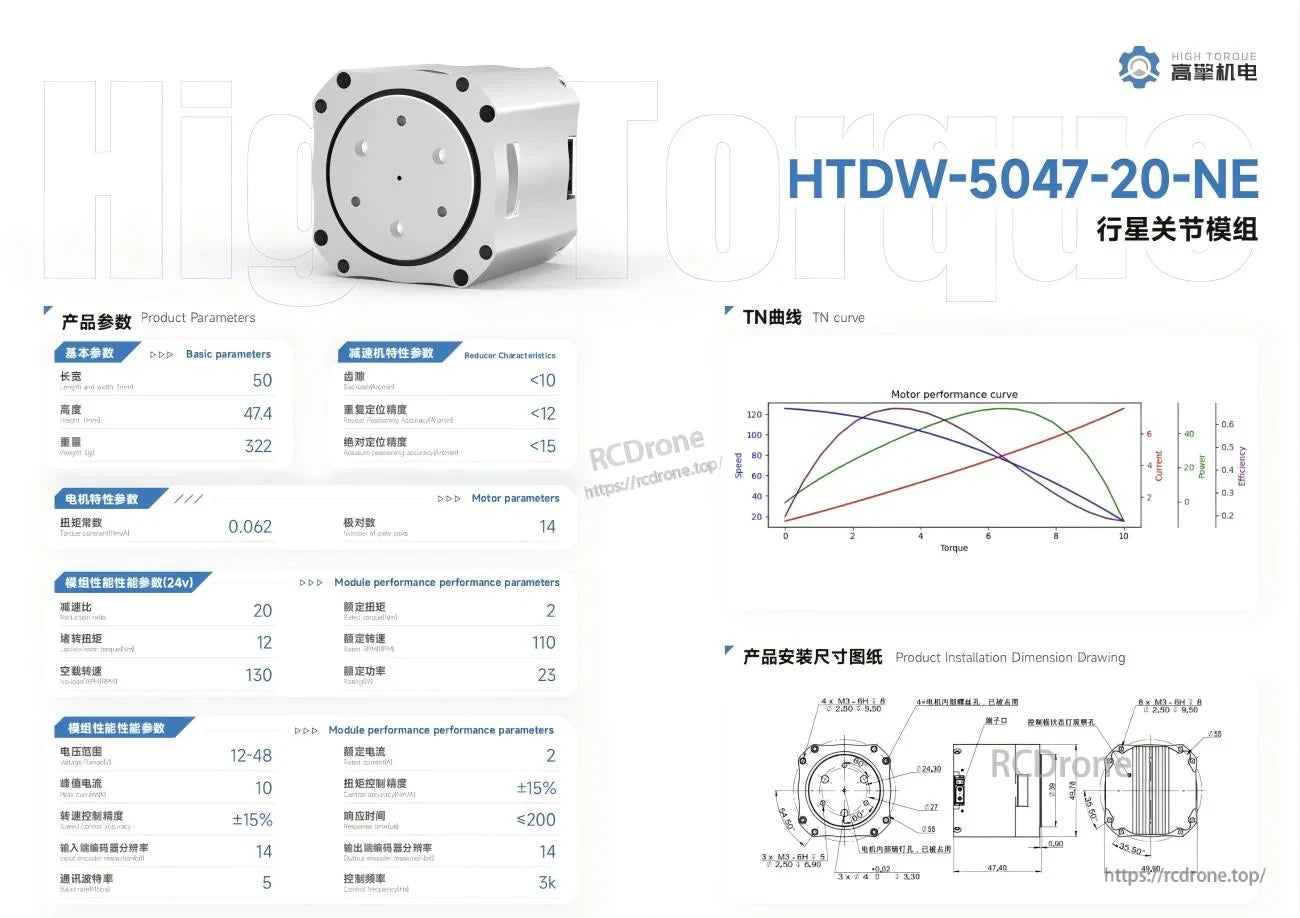
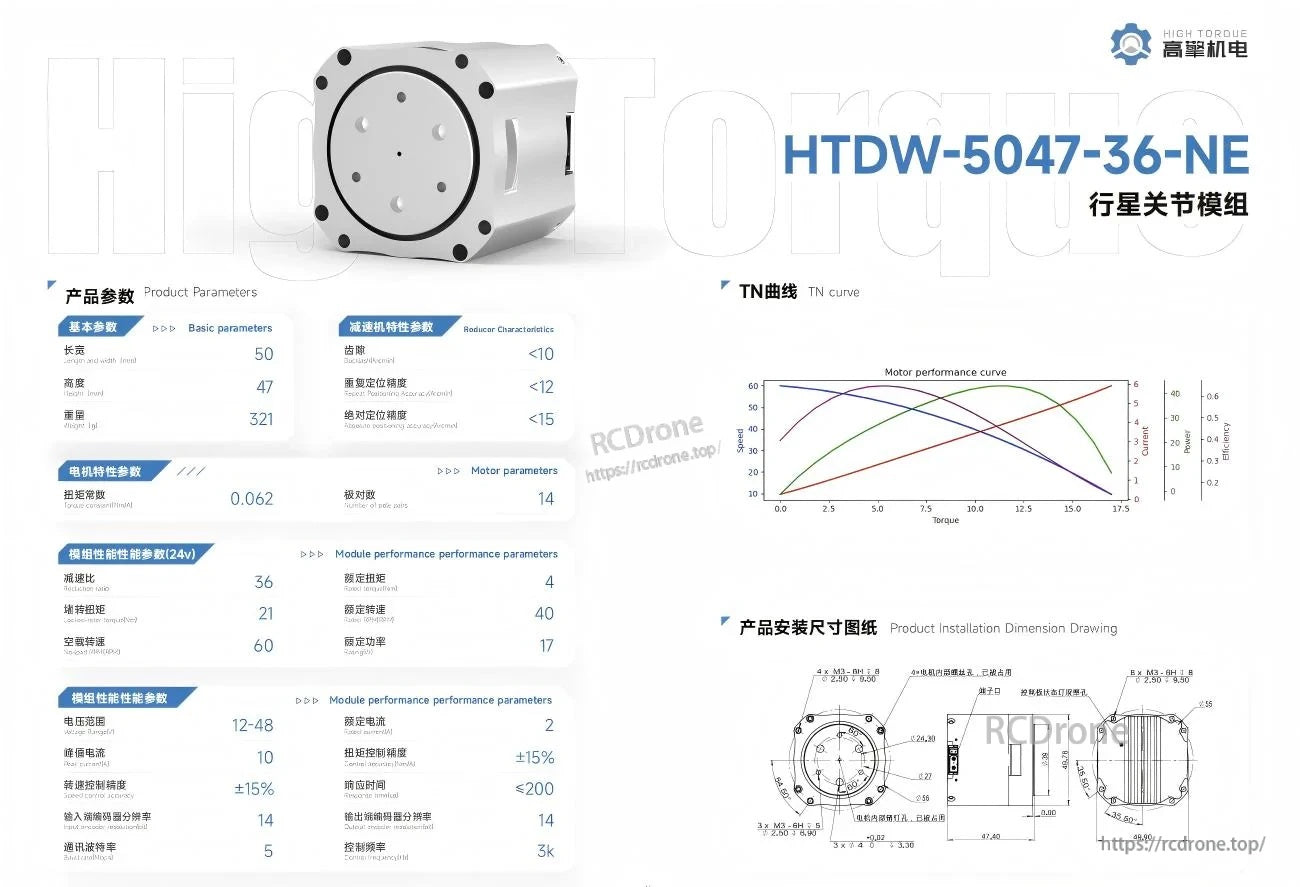
- Modèles : HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Faible jeu : <10 Arcmin
- Précision de positionnement répétée : <12 Arcmin ; précision de positionnement absolue : <15 Arcmin
- Résolution de l'encodeur : 14 bits (entrée) et 14 bits (sortie)
- Débit en bauds : 5 Mbps ; temps de réponse : ≤200 us
Spécifications
| Paramètre | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Longueur et largeur | 50mm | 50mm | 50mm |
| Hauteur | 47.4mm | 47.4mm | 47mm |
| Poids | 300g | 322g | 321g |
| Jeu | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Précision de positionnement répétée | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Précision de positionnement absolue | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Constante de couple | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Nombre de paires de pôles | 14 | 14 | 14 |
| Rapport de réduction | 9 | 20 | 36 |
| Couple de rotor bloqué | 6 Nm | 12 Nm | 21 Nm |
| RPM à vide | 260 RPM | 130 RPM | 60 RPM |
| Couple nominal | 1 Nm | 2 Nm | 4 Nm |
| RPM nominal | 170 RPM | 110 RPM | 40 RPM |
| Évaluation | 18 W | 23 W | 17 W |
| Plage de tension | 12-48V | 12-48V | 12-48V |
| Courant de pointe | 10 A | 10 A | 10 A |
| Précision de contrôle de la vitesse | ±8% | ±15% | ±15% |
| Résolution de l'encodeur d'entrée | 14 bits | 14 bits | 14 bits |
| Débit en bauds | 5 Mbps | 5 Mbps | 5 Mbps |
| Courant nominal | 2 A | 2 A | 2 A |
| Précision de contrôle | ±10% | ±15% | ±15% |
| Temps de réponse | ≤200 µs | ≤200 µs | ≤200 µs |
| Résolution de l'encodeur de sortie | 14 bits | 14 bits | 14 bits |
| Fréquence de contrôle | 3 kHz | 3 kHz | 3 kHz |
Pour des conseils de sélection et un support après-vente, contactez [email protected] or visitez https://rcdrone.top/.
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Manuels
- Manuel de l'utilisateur de l'assistant de débogage du moteur HTDW-5047-9-NE HIGH TORQUE (PDF)
- Manuel de l'utilisateur de l'assistant de débogage du moteur HTDW-5047-20-NE HIGH TORQUE (PDF)
- Manuel de l'utilisateur de l'assistant de débogage du moteur HTDW-5047-36-NE HIGH TORQUE (PDF)
- Manuel de débogage HTDW-5047-9-NE (PDF)
- Manuel de débogage HTDW-5047-20-NE (PDF)
- Manuel de débogage HTDW-5047-36-NE (PDF)
- Analyse du protocole 1.2 fdcan HTDW-5047-9-NE (PDF)
- Analyse du protocole 1.2 fdcan HTDW-5047-20-NE (PDF)
- HTDW-5047-36-NE 1.2 Analyse du protocole fdcan (PDF)
- Modèle 3D du moteur HTDW-5047-9-NE (STP, ZIP)
- Modèle 3D du moteur HTDW-5047-20-NE (STP, ZIP)
- Modèle 3D du moteur HTDW-5047-36-NE (STP, ZIP)
- Manuel de l'utilisateur HTDW-5047 (PDF)
Détails

La série HTDW-5047 combine un facteur de forme compact de 50 mm avec un couple élevé pour les articulations robotiques et le contrôle de mouvement.
Choisissez la version à réduction 9:1 lorsque la vitesse plus élevée est priorisée tout en conservant le même encombrement du module.
L'option de réduction 20:1 équilibre vitesse et couple pour des articulations robotiques et des actionneurs à usage général.
La variante à réduction 36:1 est adaptée aux articulations à faible vitesse et à couple élevé où un positionnement précis est essentiel.
Related Collections


