Module GPS Holybro DroneCAN M8N - Processeur STM32G4 BMM150 Boussole 3GNSS Prise en charge du protocole DroneCAN
Module GPS Holybro DroneCAN M8N - Processeur STM32G4 BMM150 Boussole 3GNSS Prise en charge du protocole DroneCAN
HolyBro
Impossible de charger la disponibilité du service de retrait
Description
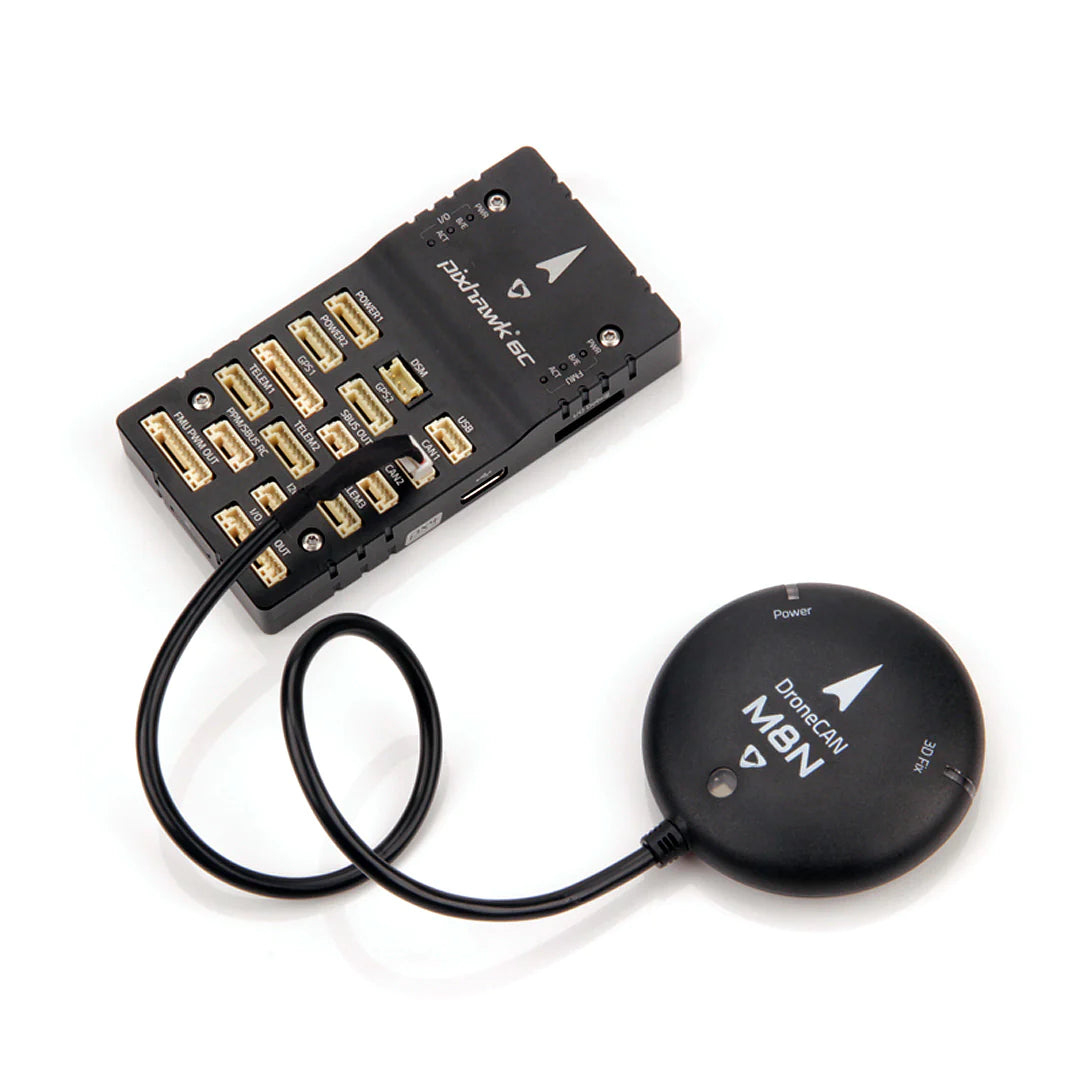
Le GPS Holybro DroneCAN dispose d'un module UBLOX M8N ou M9N, d'une boussole BMM150 et d'un indicateur LED tricolore. Il dispose du processeur STM32G4 et a adopté le protocole DroneCAN pour la communication, ce qui le rend plus fiable et plus efficace dans la gestion des interférences électromagnétiques par rapport à la connexion série. Il n'occupe aucun port série du contrôleur de vol et différents appareils CAN peuvent être connectés au même bus CAN via une carte de répartition CAN.
Spécification :
| DroneCAN M8N | |
| Récepteur GNSS | Ublox NÉO M8N |
| Nombre de GNSS simultanés | Jusqu'à 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Processeur | STM32G4 (170 MHz, FLASH 512K) |
| Boussole | BMM150 |
| Bande de fréquence | GPS : L1C/A GLONASS : L10F Beidou : B1I Galileo : E1B/C |
| Système d'augmentation GNSS | SBAS : WAAS, EGNOS, MSAS, QZSS |
| Mise à jour de la navigation | 5 Hz par défaut (10 Hz MAX) |
| Précision | 2,5 m |
| Précision de la vitesse | 0,05 m/s |
| Nombre maximum de satellites | 22+ |
| Protocole de communication | DroneCAN à 1 Mbit/s |
| Prend en charge le micrologiciel du pilote automatique | PX4, Ardupilot |
| Type de port | GHR-04V-S |
| Antenne | Antenne patch en céramique 25 x 25 x 4 mm |
| Consommation électrique | Moins de 200 mA à 5 V |
| Tension | 4,7-5,2 V |
| Température de fonctionnement | -40~80C |
| Taille | Diamètre : 54 mm Épaisseur : 14,5 mm |
| Poids | 36g |
| Longueur du câble | 26 cm |
| Autres remarques | - Amplificateur RF LNA MAX2659ELT+ - Capacité Farah rechargeable - Régulateur 3,3 V à faible bruit |
Pour d'autres informations techniques, veuillez consulter https://docs.holybro.com/
DroneCAN
DroneCAN est le principal protocole CAN utilisé par les projets ArduPilot et PX4 pour la communication avec les périphériques CAN. Il s'agit d'un protocole ouvert avec une communication ouverte, des spécifications et de multiples implémentations ouvertes.
Développement de DroneCAN
Le projet DroneCAN dispose d'une communauté de développement active.
- discussions sur Discord sur https://dronecan.org/discord
- développement sur github sur https://github.com/DroneCAN
Related Collections