Holybro Pixhawk 6X pilote automatique H753 Module de contrôleur de vol Base Standard/Mini Base PM02D M9N M10 GPS RC avions multirotor
Holybro Pixhawk 6X pilote automatique H753 Module de contrôleur de vol Base Standard/Mini Base PM02D M9N M10 GPS RC avions multirotor
HolyBro
Impossible de charger la disponibilité du service de retrait
Module de contrôleur de vol Holybro Pixhawk 6X Autopilot H753 pour drones et avions multirotors
Le contrôleur de vol Holybro Pixhawk 6X Autopilot H753 est un contrôleur de vol modulaire avancé conçu pour les drones multirotors industriels et commerciaux et les avions à voilure fixe. Doté d'une technologie de pointe et d'une variété de configurations, le Pixhawk 6X offre des performances et une fiabilité inégalées pour les applications exigeantes.
Caractéristiques principales
1. Redondance avancée et technologie BalancedGyro™
Le Pixhawk 6X intègre une triple redondance avec trois capteurs IMU ICM-45686 (±32g) et deux capteurs barométriques. Ces capteurs sont complètement isolés et fonctionnent sur des bus séparés avec un contrôle de puissance séparé, garantissant la fiabilité dans les missions critiques. La technologie BalancedGyro™ optimise la précision et la stabilité du capteur.
2. Processeur hautes performances
Alimenté par le processeur STM32H753 avec une vitesse d'horloge allant jusqu'à 480 MHz, le contrôleur de vol offre des capacités de calcul exceptionnelles. Il comprend 2 Mo de mémoire flash et 1 Mo de RAM pour une exécution de mission fluide.
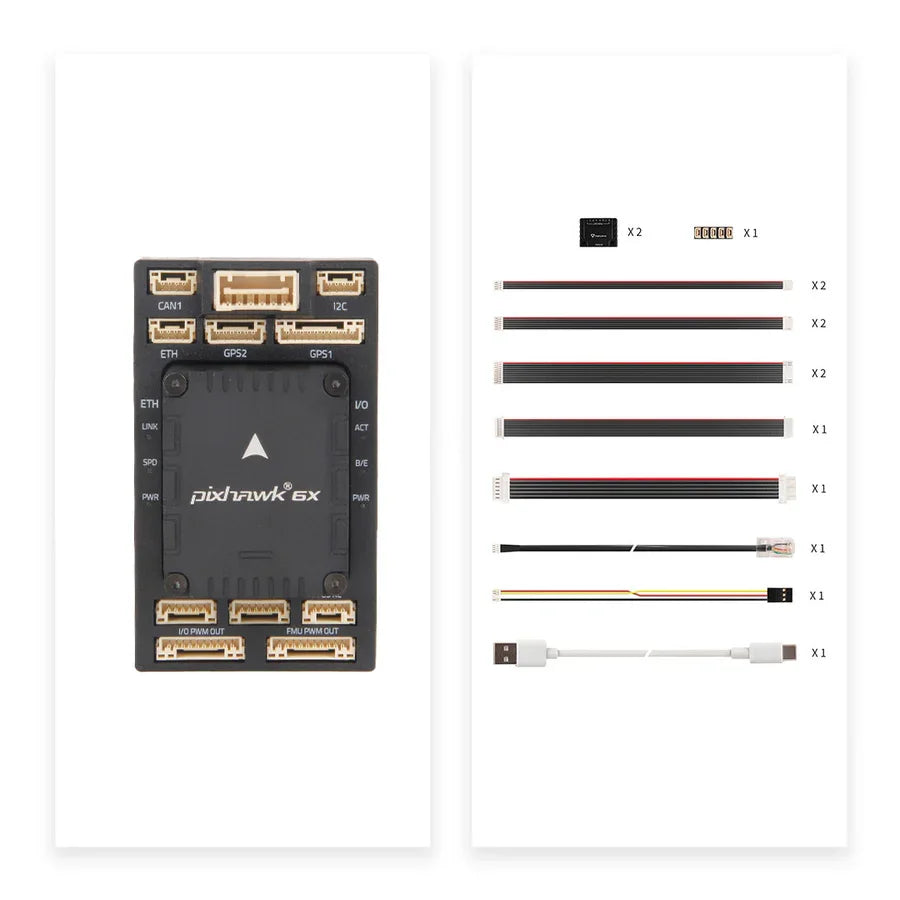
3. Conception modulaire
Le Pixhawk 6X présente une conception modulaire avec des systèmes IMU, FMU et de base séparés. Ces composants sont interconnectés via un connecteur de bus de pilote automatique Pixhawk® à 100 broches et à 50 broches, permettant une personnalisation et une maintenance flexibles.
4. Nouveau système d'isolation des vibrations
Utilisant un matériau d'isolation des vibrations durable formulé sur mesure, le système d'amortissement innovant du Pixhawk 6X garantit des performances IMU optimales avec des fréquences de résonance dans le spectre supérieur, le rendant idéal pour les applications industrielles et commerciales.
5. Interface Ethernet
Une interface Ethernet prend en charge l'intégration informatique de mission à haut débit, permettant un échange de données transparent pour un contrôle de mission avancé.
6. Carte IMU à température contrôlée
La carte IMU fonctionne dans une plage de température optimale, garantissant des performances constantes même dans des environnements difficiles.
7. Compatibilité étendue du micrologiciel
La version Rev 8 prend en charge le firmware PX4 (1.14.3 ou version ultérieure) et le firmware Ardupilot (4.5.0 ou version ultérieure). Les utilisateurs peuvent flasher le firmware via Mission Planner ou QGroundControl pour répondre à leurs besoins spécifiques.
Configurations
Le Holybro Pixhawk 6X est disponible dans différentes configurations pour répondre à divers besoins :
-
Plinthe standard: Dimensions : 52,4 x 102 x 16,7 mm ; Poids : 72,5 g (aluminium)
-
Mini plinthe: Dimensions : 43,4 x 72,8 x 14,2 mm ; Poids : 26.5g
-
Modules GPS en option : M9N, M10 GPS pour une navigation précise
-
Modules d'alimentation : PM02D pour une alimentation électrique fiable
Caractéristiques
Processeurs et capteurs :
-
Processeur FMU : STM32H753 32 bits Arm® Cortex®-M7, 480 MHz, 2 Mo de mémoire flash, 1 Mo de RAM
-
Processeur IO : STM32F103 32 bits Arm® Cortex®-M3, 72 MHz, 64 Ko de SRAM
-
Capteurs IMU : 3x ICM-45686 avec technologie BalancedGyro™
-
Baromètres : ICP20100 et BMP388
-
Magnétomètre : BMM150
-
Élément sécurisé : Matériel Plug & Trust NXP EdgeLock SE050
Données électriques :
-
Tension nominale :
-
Tension d'entrée maximale : 6 V
-
Entrée d'alimentation USB : 4,75~5,25 V
-
Entrée du rail servo : 0~36 V
-
-
Cotes actuelles :
-
Limiteur de courant de sortie Telem1 : 1,5 A
-
Limiteur de courant de sortie combiné de tous les autres ports : 1,5 A
-
-
Tension du signal PWM : Par défaut 3,3 V (réglable à 5 V avec modification de la résistance intégrée)
Données mécaniques :
-
Dimensions du module de contrôleur de vol : 38,8 x 31,8 x 16,8 mm ; poids : 31,3 g
-
Options de plinthes :
-
Plinthe standard : 52,4 x 102 x 16,7 mm ; poids : 72,5 g
-
Mini plinthe : 43,4 x 72,8 x 14,2 mm ; poids : 26,5 g
-
Applications
Le Holybro Pixhawk 6X est conçu pour :
-
Drones multirotors industriels et commerciaux
-
Navigation des avions à voilure fixe
-
Contrôle de mission avancé avec intégration de données à grande vitesse
Que vous construisiez un multirotor personnalisé ou que vous amélioriez un système à voilure fixe, le pilote automatique Holybro Pixhawk 6X offre une solution polyvalente, robuste et fiable. Sa conception modulaire, sa technologie avancée et ses multiples options de configuration garantissent qu'il répond aux besoins de toute application professionnelle.
Related Collections