Holybro Pixhawk 6X (ICM-45686) Contrôleur de vol – IMU triple redondance, STM32H753, Ethernet, compatible PX4 & ArduPilot
Holybro Pixhawk 6X (ICM-45686) Contrôleur de vol – IMU triple redondance, STM32H753, Ethernet, compatible PX4 & ArduPilot
HolyBro
Impossible de charger la disponibilité du service de retrait
Présentation
Le Holybro Pixhawk 6X (ICM-45686) est un contrôleur de vol autopilote modulaire haute performance conçu pour des applications de drones industrielles et commerciales exigeantes. Doté de gyroscopes ICM-45686 IMUs triple redondants avec la technologie BalancedGyro™, de baromètres doubles et d'un processeur STM32H753 fonctionnant à 480 MHz, le Pixhawk 6X offre une fiabilité inégalée, des performances en temps réel et une flexibilité. Son architecture modulaire, son isolement des vibrations avancé et son interface Ethernet en font un choix idéal pour les systèmes UAV nécessitant un contrôle robuste, une précision et une adaptabilité aux missions.
Caractéristiques clés
-
Redondance IMU Triple: 3x ICM-45686 IMUs (±32g) avec la technologie BalancedGyro™ pour une navigation inertielle tolérante aux pannes
-
Baromètres Doubles: ICP20100 et BMP388 pour une précision d'altitude améliorée
-
Processeur Haute Vitesse: STM32H753 Cortex-M7, 480MHz, avec 2MB Flash & 1MB RAM
-
Conception Modulaire: Sépare FMU, IMU et carte de base, connectés via un bus Pixhawk® de 100 broches & 50 broches
-
Carte IMU Contrôlée par Température: Assure des performances optimales des capteurs sur une plage de températures
-
Intégration Ethernet: Prend en charge la communication à haute vitesse avec les ordinateurs de mission
-
Support du Module d'Alimentation Numérique: Fournit des mesures de tension et de courant plus précises
Système d'Isolation Avancé: Matériau durable, formulé sur mesure, offrant un amortissement des vibrations à large spectre
-
Compatibilité du Firmware: Livré avec PX4 (v1.14.3+), prend en charge ArduPilot (v4.5.0+)
Spécifications
Processeurs & Capteurs
| Composant | Détails |
|---|---|
| Processeur FMU | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| Processeur IO | STM32F103, ARM Cortex-M3, 72MHz |
| Capteurs IMU | 3x ICM-45686 (BalancedGyro™) |
| Baromètre | ICP20100 & BMP388 |
| Magnétomètre | BMM150 |
| Élément Sécurisé | NXP SE050 Plug & Trust |
Paramètres Électriques
| Paramètre | Value |
|---|---|
| Tension d'entrée maximale | 6V |
| Entrée d'alimentation USB | 4.75~5.25V |
| Voltage de rail de servo | 0~36V |
| Limite de courant Telem1 & GPS2 | 1.5A combiné |
| Limite de courant des autres ports | 1.5A combiné |
| Tension du signal PWM | Par défaut 3.3V (commutable à 5V via une résistance) |
| Température de fonctionnement | -25°C à +85°C |
Dimensions mécaniques & Poids
| Composant | Dimensions (mm) | Poids (g) |
|---|---|---|
| Contrôleur de vol | 38.8 x 31.8 x 16.8 | 31.3g |
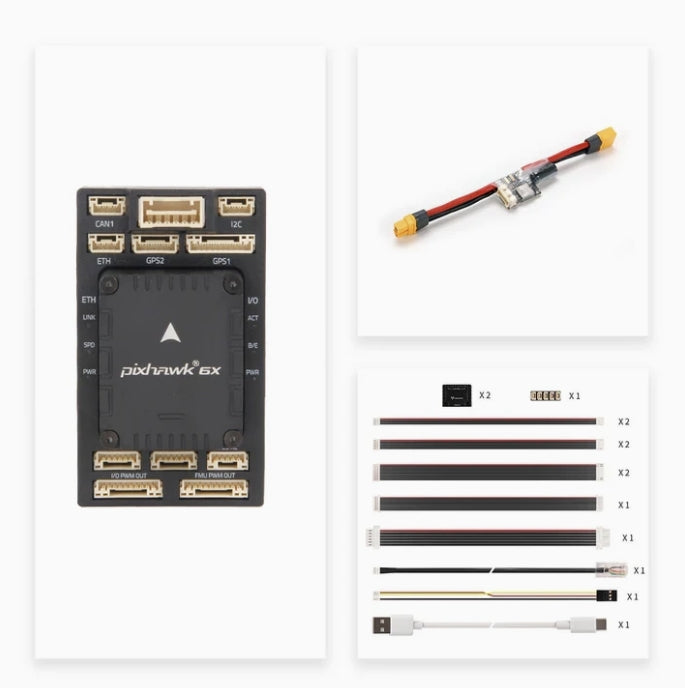
| Carte de base standard | 52.4 x 102 x 16.7 | 72.5g |
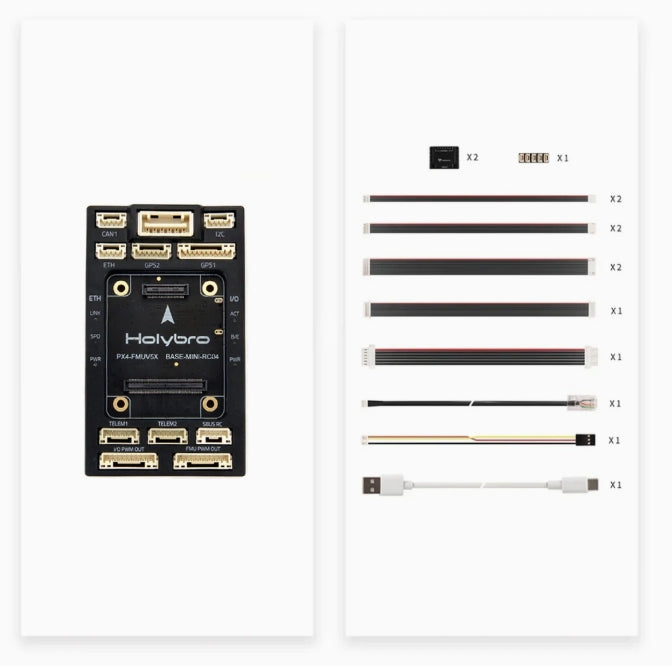
| Mini Baseboard | 43.4 x 72.8 x 14.2 | 26.5g |
Compatibilité du firmware
-
PX4: Entièrement pris en charge à partir de la version 1.14.3 et supérieure
-
ArduPilot: Entièrement pris en charge à partir de la version 4.5.0 et plus
-
Flashing du firmware pris en charge via Mission Planner ou QGroundControl
Applications
Idéal pour l'intégration dans :
-
Drones industriels
-
Systèmes UAV commerciaux
-
Aéronefs VTOL
-
Plateformes de recherche académique
-
Missions multi-capteurs et de haute fiabilité
Détails

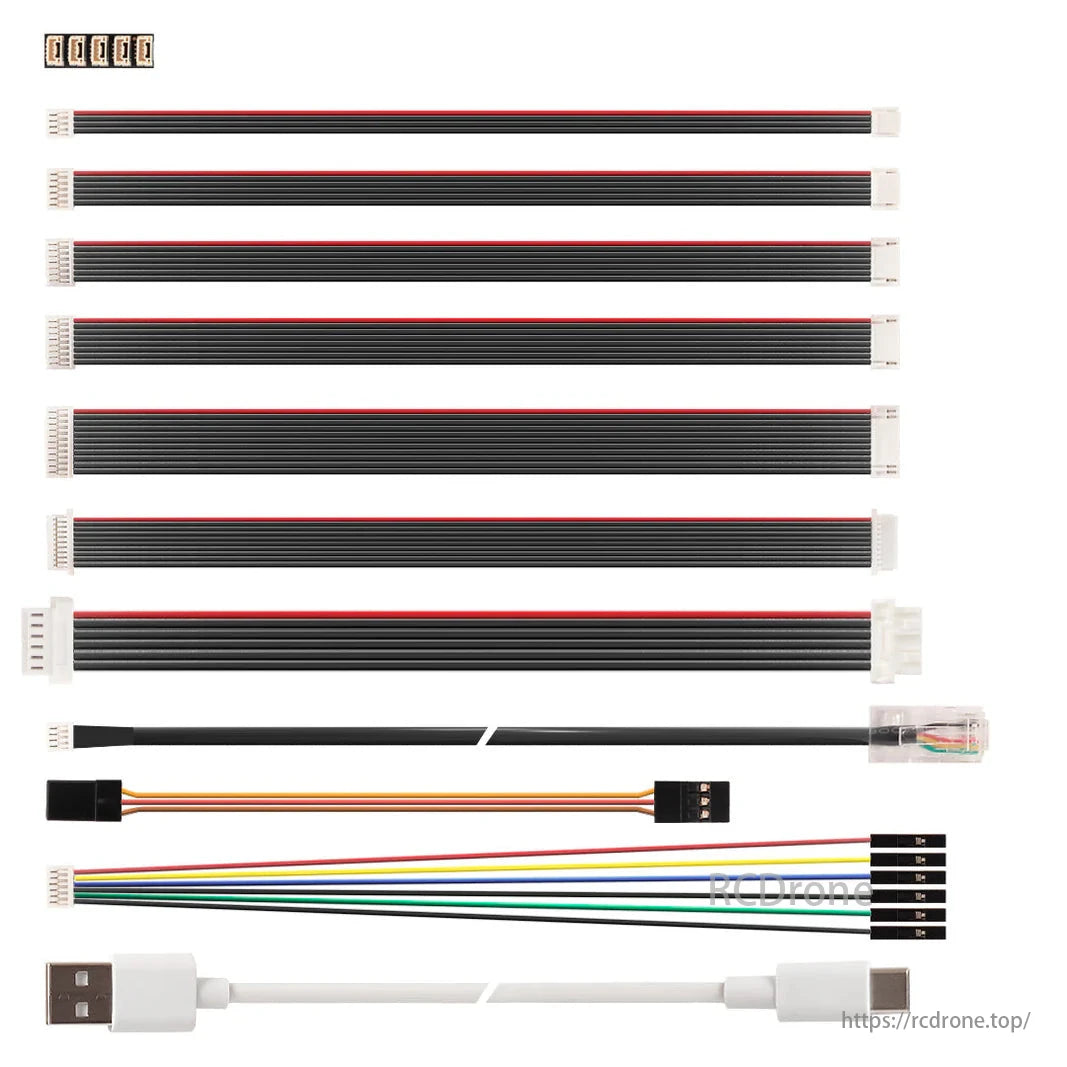
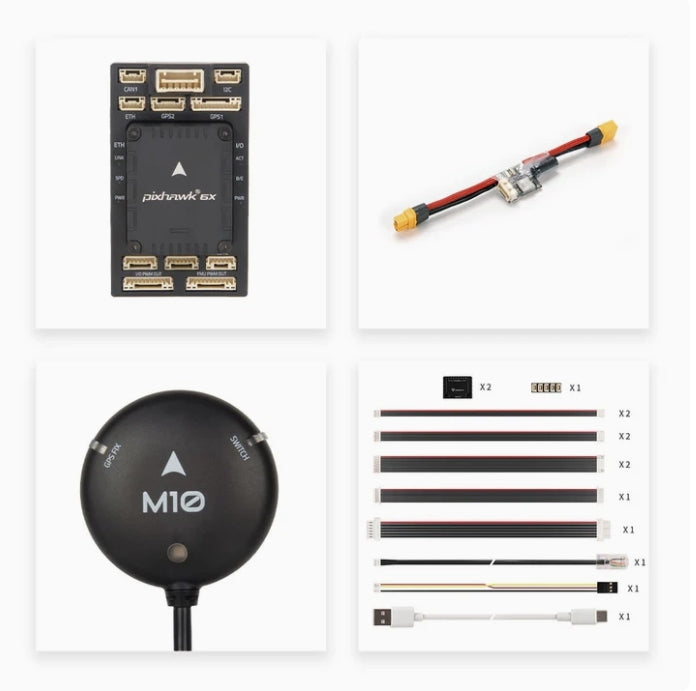
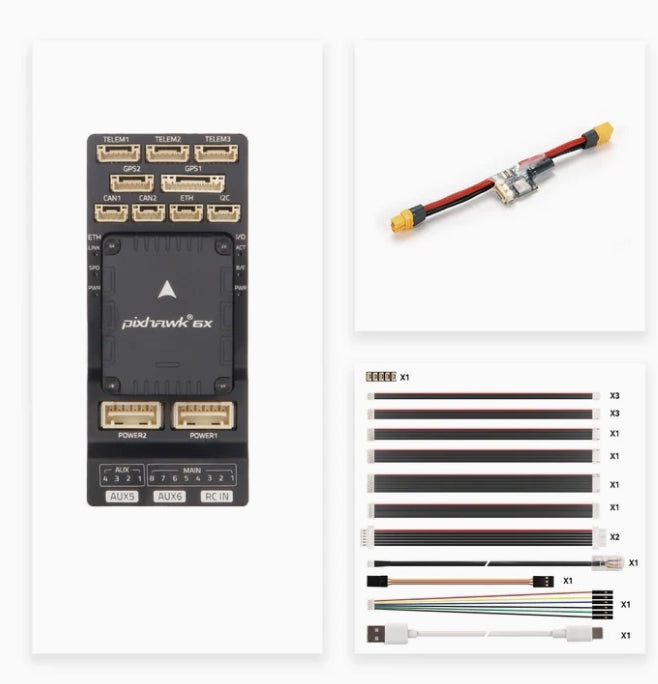
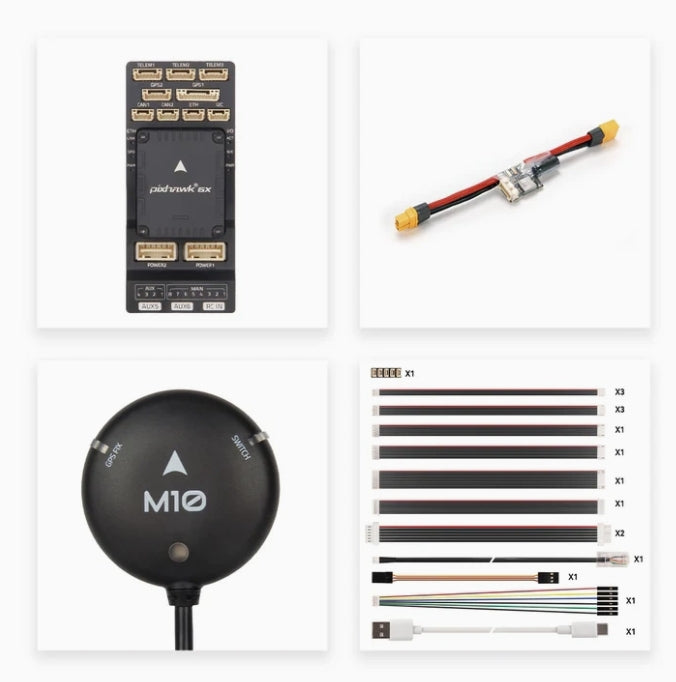
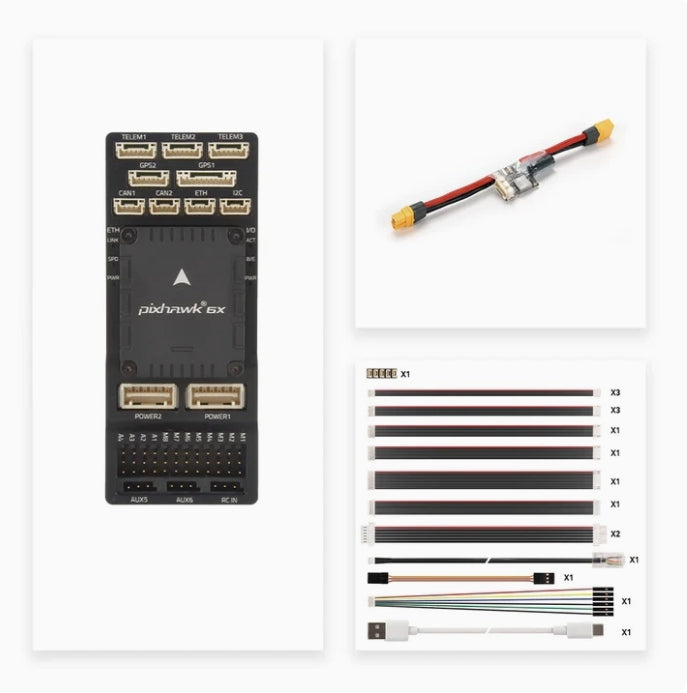
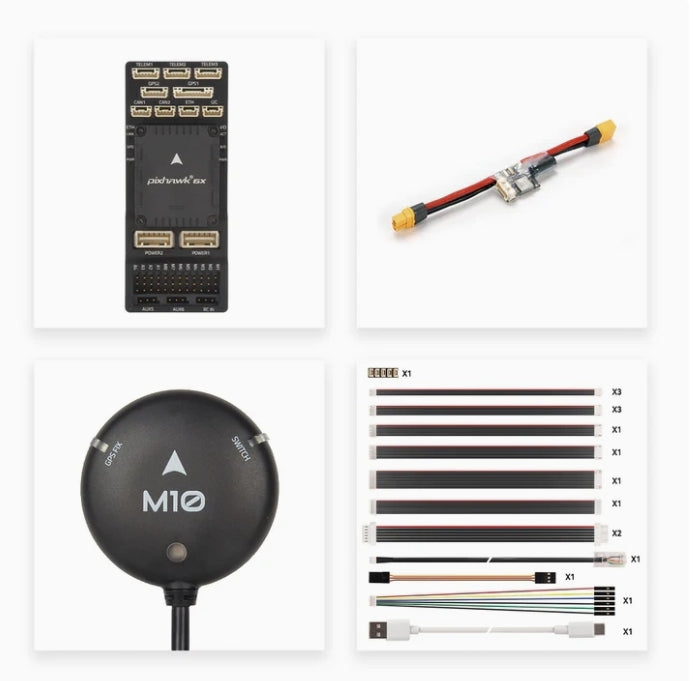
Pixhawk 6X offre un design plus mince avec deux modèles. Il dispose d'un connecteur à broches amélioré pour une meilleure connectivité et performance, ce qui le rend idéal pour des applications avancées. Choisissez le modèle qui convient à vos besoins.
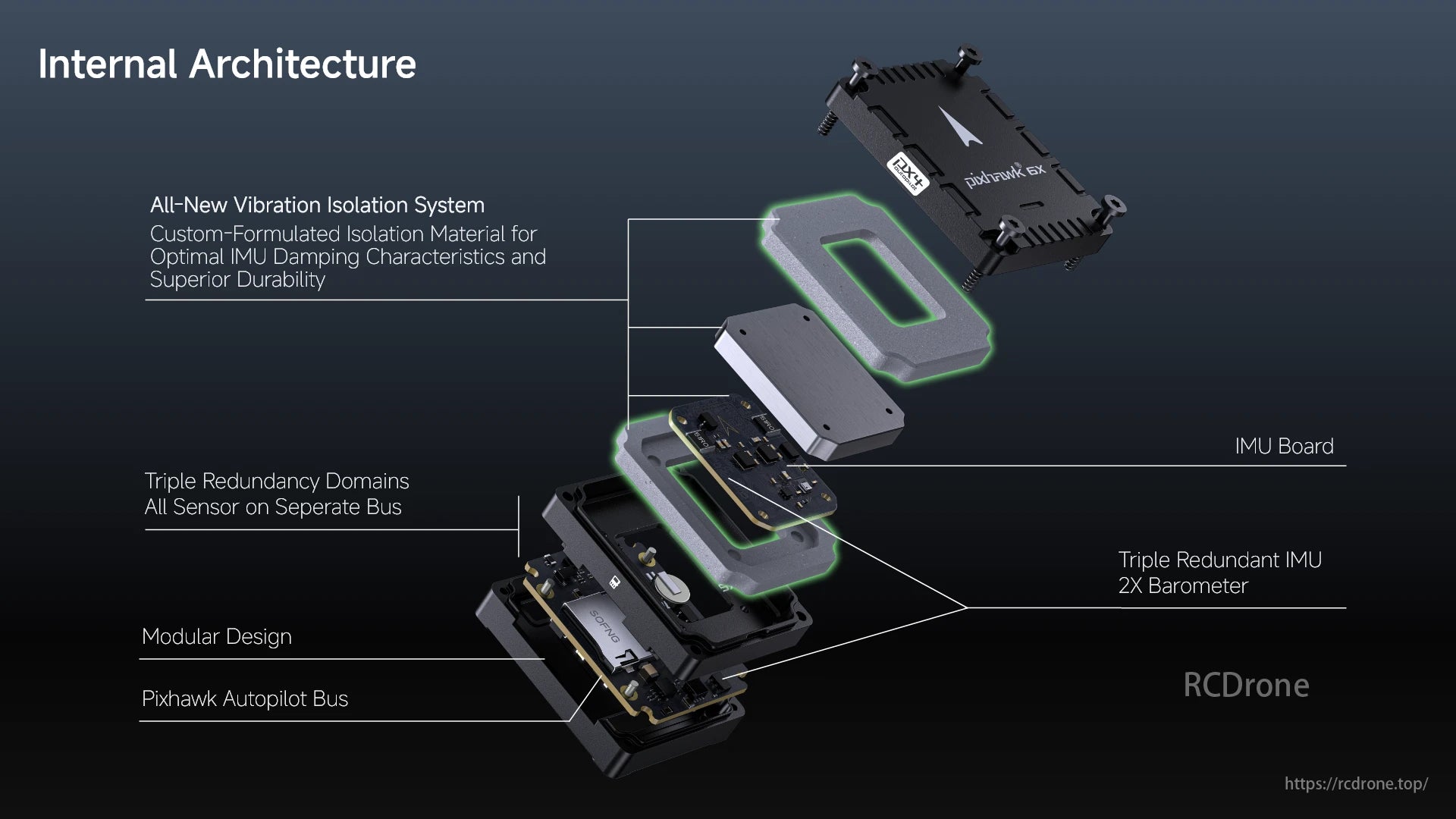
Le Holybro Pixhawk 6X offre une isolation des vibrations, une triple redondance, un design modulaire, un bus d'autopilote, une carte IMU et 2x baromètres pour des performances avancées.
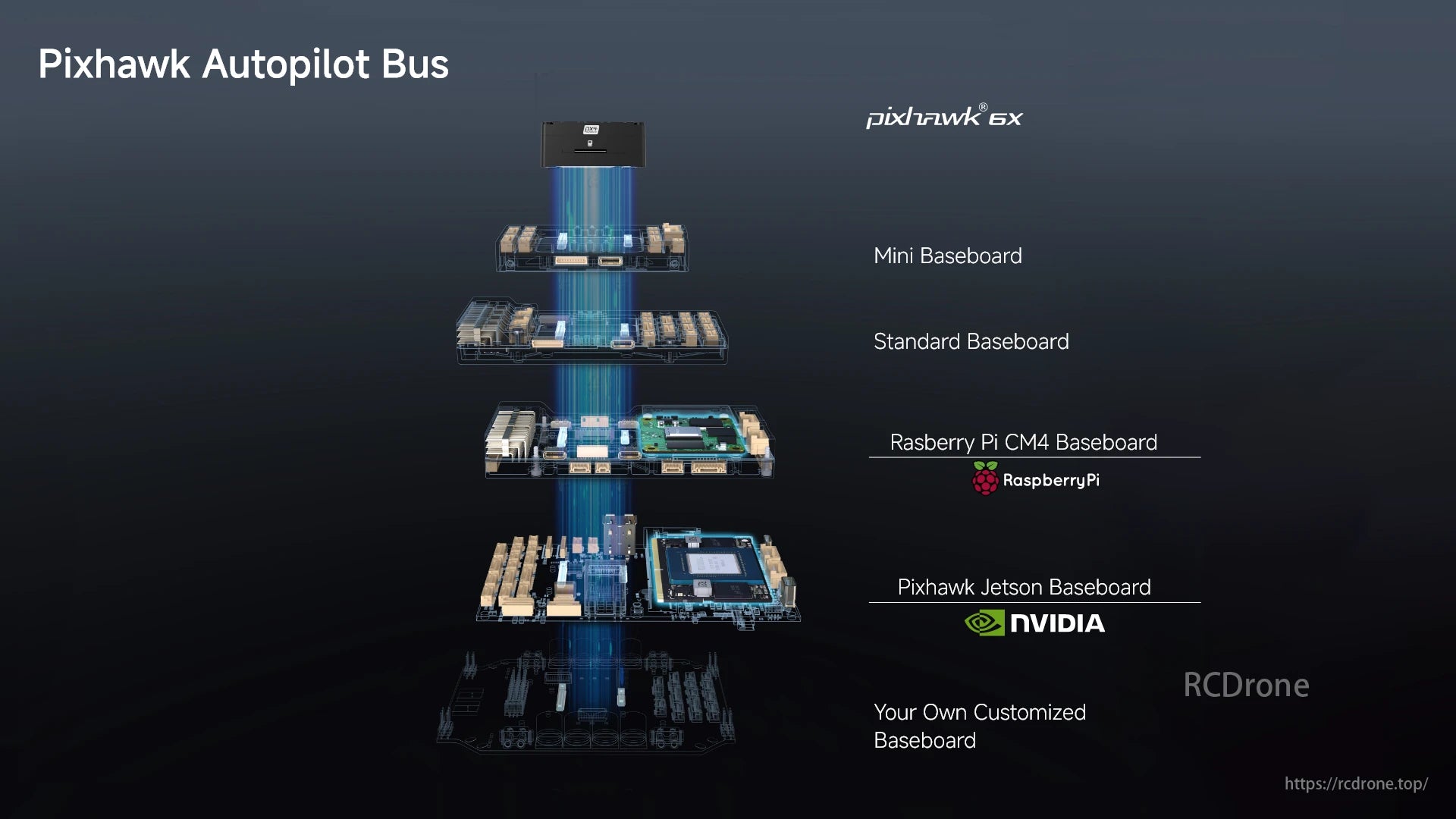
Pixhawk Le bus d'autopilote comprend Pixhawk 6X, Mini Baseboard, Standard Baseboard, Raspberry Pi CM4 Baseboard, Jetson Baseboard et des options personnalisées.

Des résistances de compensation de température, une IMU redondante & un baromètre, des technologies de capteurs diverses et un matériau d'isolation garantissent la précision.

Le bus d'autopilote Pixhawk, le processeur STM H753 32 bits (480 MHz), l'IMU Invensense ICM45686 avec la technologie BalancedGyro et l'élément sécurisé NXP EdgeLock SE050 sont intégrés dans la carte FMU.
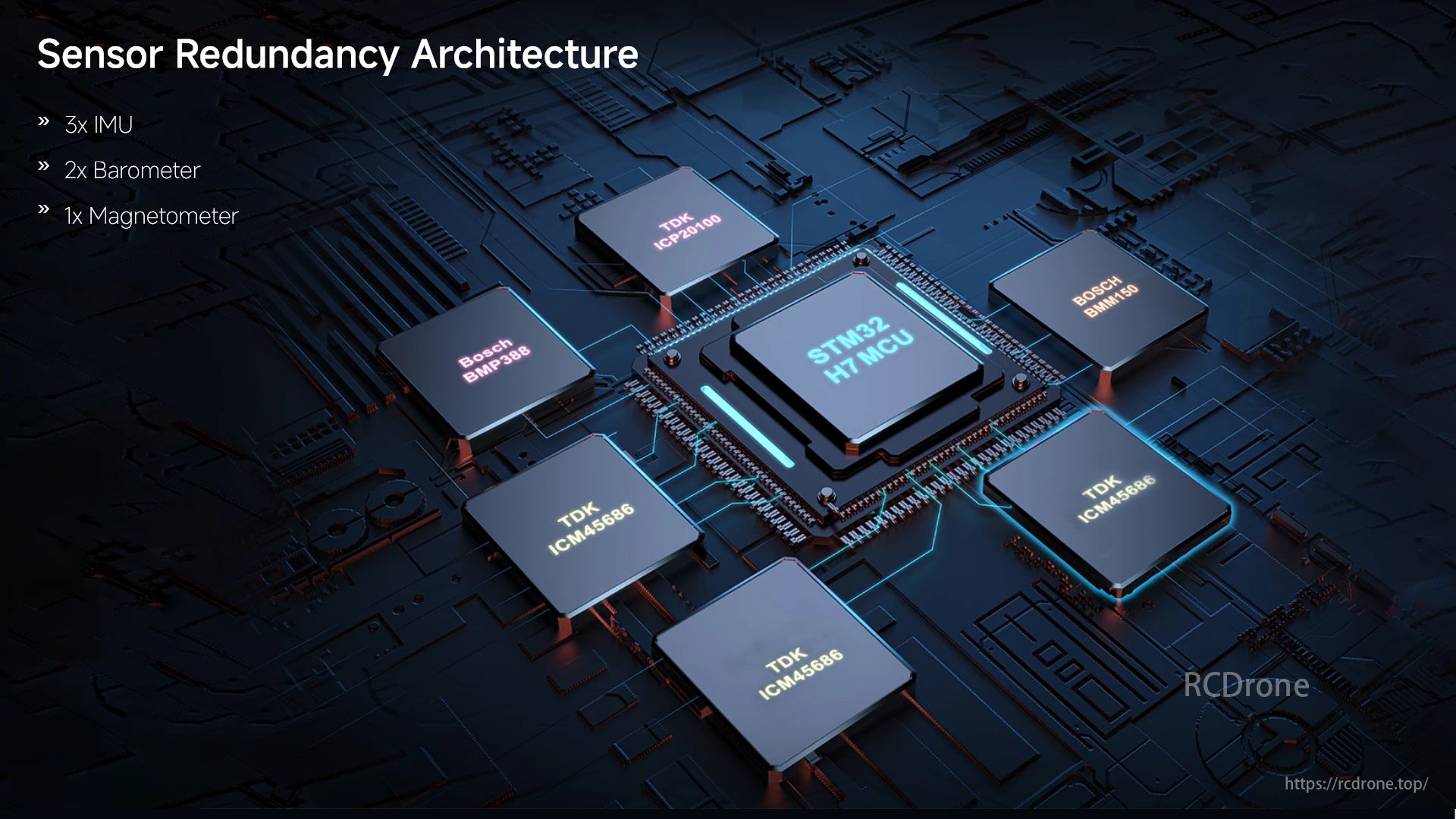
Architecture de redondance des capteurs avec 3x IMU, 2x baromètres et 1x magnétomètre.Caractéristiques du MCU STM32 H7, capteurs TDK ICM-45686, Bosch BMP388 et BMM50 pour des performances améliorées.
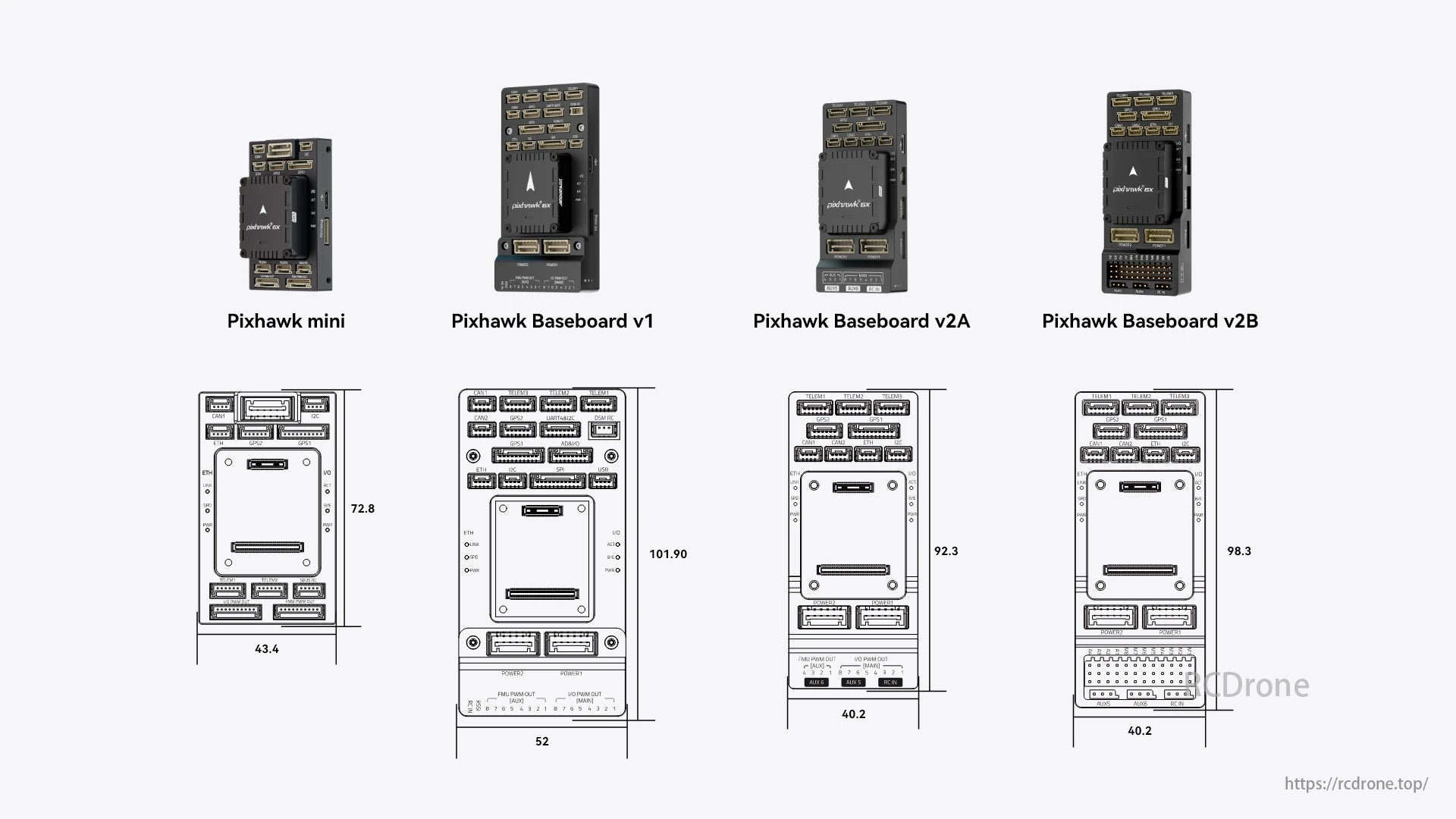
Contrôleurs de vol Pixhawk mini, Baseboard v1, v2A et v2B avec des dimensions : 43,4x72,8, 52x101,90, 40,2x92,3 et 40,2x98,3 respectivement. Divers ports et connecteurs sont visibles sur chaque modèle.
Related Collections