Holybro Pixhawk 6X-RT - (Édition développeur) Contrôleur de vol de pilote automatique Standard/Mini Set
Holybro Pixhawk 6X-RT - (Édition développeur) Contrôleur de vol de pilote automatique Standard/Mini Set
HolyBro
Impossible de charger la disponibilité du service de retrait
Vue d'ensemble
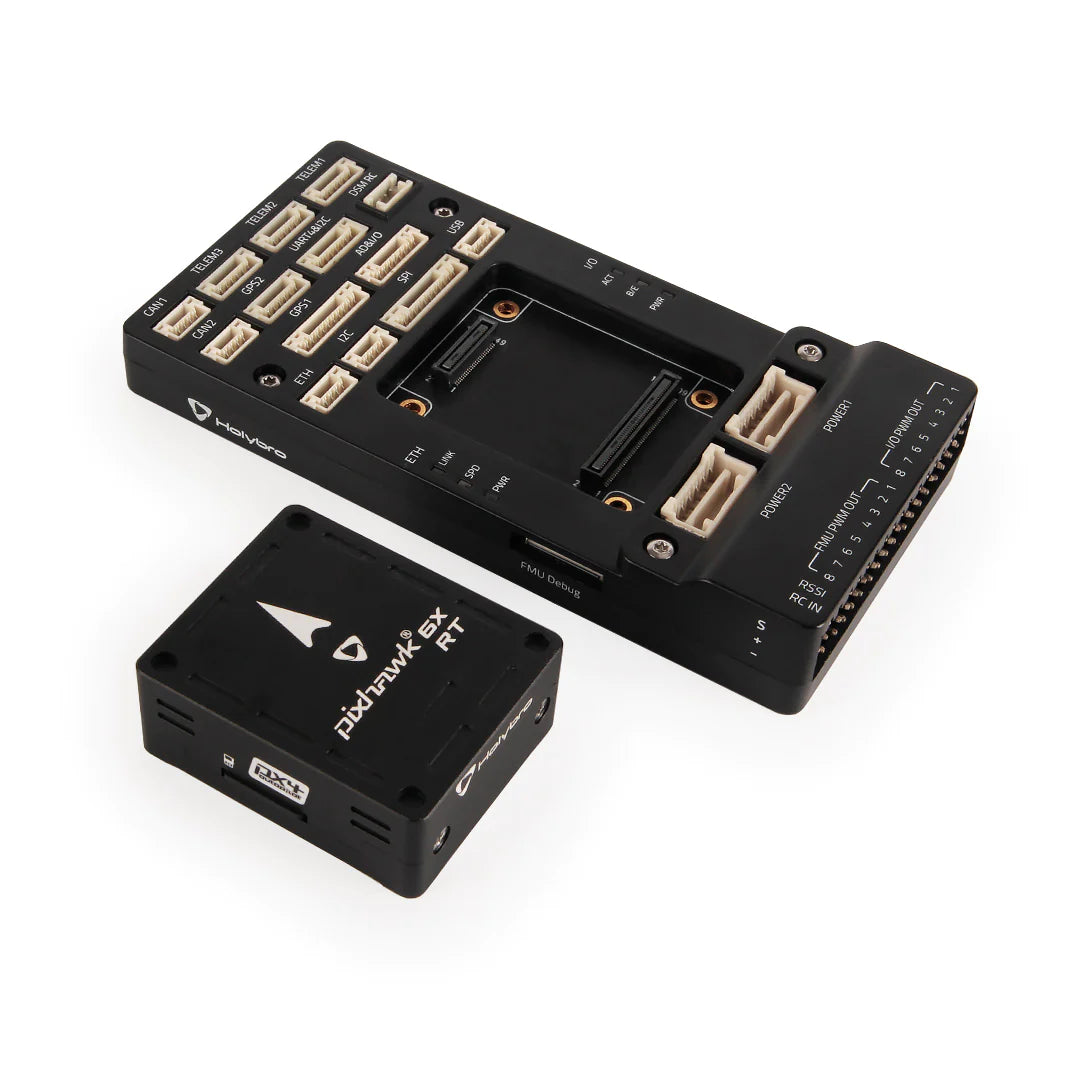
Le Pixhawk 6X-RT est basé sur la norme ouverte Pixhawk® FMUv6X-RT et la norme de bus de pilote automatique Pixhawk®. Il est livré avec PX4 Autopilot® préinstallé. À l’intérieur du contrôleur de vol Pixhawk 6X-RT, vous pouvez trouver un i.Le MCU MXRT1176, associé à la technologie de capteurs de Bosch® et InvenSense®, vous offre flexibilité et fiabilité pour contrôler n'importe quel véhicule autonome.
Le je.Le microcontrôleur MXRT1176 contient un Arm® Cortex-M7 à 1 GHz et un Cortex-M4 à 400 MHz. Il dispose de 2 Mo de SRAM et de 64 Mo de Flash SPI Octal. Grâce à la puissance de traitement mise à jour, les développeurs peuvent être plus productifs et efficaces dans leur travail de développement, permettant ainsi la création d'algorithmes et de modèles complexes.
Il comprend des IMU hautes performances et à faible bruit conçues pour une meilleure stabilisation, ainsi que des IMU à triple redondance et des baromètres à double redondance sur des bus séparés. Lorsque le pilote automatique détecte une panne de capteur, le système passe automatiquement à un autre pour maintenir la fiabilité des commandes de vol. Un LDO indépendant alimente chaque ensemble de capteurs avec un contrôle de puissance indépendant. Un système d'isolation des vibrations pour filtrer les vibrations à haute fréquence et réduire le bruit afin de garantir des lectures précises, permettant aux véhicules d'atteindre de meilleures performances de vol globales. Un Microchip Ethernet PHY intégré, une communication à haut débit avec les ordinateurs de mission via Ethernet est désormais possible.
Le Pixhawk 6X-RT est parfait pour les développeurs des laboratoires de recherche d'entreprise, des startups, des universitaires (recherche, professeurs, étudiants) et des applications commerciales. Ce contrôleur de vol est compatible avec n'importe quelle carte de base qui utilise le bus Pixhawk Autopilot, telle que la Pixhawk Baseboard, Pixhawk Mini Baseboard et Pixhawk RPi CM4 Baseboard.
Points clés de la conception
- Dual Core hautes performances i.Processeur MXRT1176 avec Cortex-M7 à 1 GHz – Cortex-M4 à 400 MHz
- Contrôleur de vol modulaire : système IMU, FMU et base séparés connectés par un connecteur de bus de pilote automatique Pixhawk® à 100 broches et à 50 broches.
- Redondance : 3x capteurs IMU et 2x capteurs baromètre sur des bus séparés
- Domaines à triple redondance : domaines de capteurs entièrement isolés avec bus séparés et contrôle de puissance séparé
- Système d'isolation des vibrations pour filtrer les vibrations à haute fréquence et réduire le bruit afin de garantir des lectures précises
- Interface Ethernet pour l'intégration d'ordinateurs de mission à haut débit
- Les IMU sont contrôlées en température par des résistances chauffantes intégrées, permettant une température de fonctionnement optimale des IMU
- Élément matériel sécurisé NXP EdgeLock SE051 une extension de la famille d'éléments sécurisés largement fiable EdgeLock SE050 Plug & Trust, prend en charge les mises à jour d'applets sur le terrain et fournit sécurité éprouvée certifiée CC EAL 6+, avec AVA_VAN.5 jusqu'au niveau du système d'exploitation, pour une protection renforcée contre les scénarios d'attaque les plus récents. Eg pour stocker en toute sécurité l'ID de l'opérateur
Remarque :
- Cette édition développeur est destinée aux premiers utilisateurs pendant que nous continuons à accumuler des heures de tests en vol
- Ce contrôleur de vol est actuellement pris en charge uniquement dans PX4 Flight Stack. (Cible du micrologiciel : FMUv6xrt). Il n'est pas pris en charge dans Ardupilot.
- Ce contrôleur de vol utilise un module d'alimentation numérique (identique au Pixhawk 6X, la liste complète peut être trouvée ici) Tableau de comparaison des modules d'alimentation
Spécifications
-
MCU : je.MXRT1176
-
Cortex-M7 à 1 GHz
-
Cortex-M4 à 400 MHz
-
2 Mo de SRAM
-
Flash SPI octal de 64 Mo
-
Processeur E/S : STM32F103
-
Arm® Cortex®-M3 32 bits, 72 MHz, 64 Ko de SRAM
-
Capteurs embarqués
-
Accel/Gyro : BMI088
-
Accel/Gyro : ICM-42670-P
-
Accel/Gyroscope : ICM-42686-P
-
Mag : BMM150
-
Baromètre : 2x BMP388
- Élément matériel sécurisé
- NXP EdgeLock SE051C2
- Interface SDHC
- PWM 12 canaux
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Activation des logiciels Open Source
- Pilote automatique PX4
- RTOS NuttX
- RTOS Zephyr
L'ensemble standard SKU20257/le mini-ensemble SKU258 comprend :
-
Module de contrôleur de vol Pixhawk 6X-RT
-
Base standard Pixhawk/Mini-base Pixhawk
- Module d'alimentation HT PM02D
-
Jeu de câbles
Lien de référence :
- Instruction de flashage du micrologiciel (Github)
- PX4 sur le microcontrôleur NXP IMXRT1176 1 GHz - Diapositives de présentation par NXP
- je.MX RT1176 – page produit MCU croisé 1 GHz avec cœurs Arm® Cortex®
- EdgeLock® SE051 : solution de sécurité IoT éprouvée et facile à utiliser avec prise en charge de la possibilité de mise à jour et des applets personnalisés
Related Collections