Ensemble de plinthes Holybro Pixhawk Jetson avec 6X / 6X Pro et NVIDIA Jetson
Ensemble de plinthes Holybro Pixhawk Jetson avec 6X / 6X Pro et NVIDIA Jetson
HolyBro
Impossible de charger la disponibilité du service de retrait
Aperçu
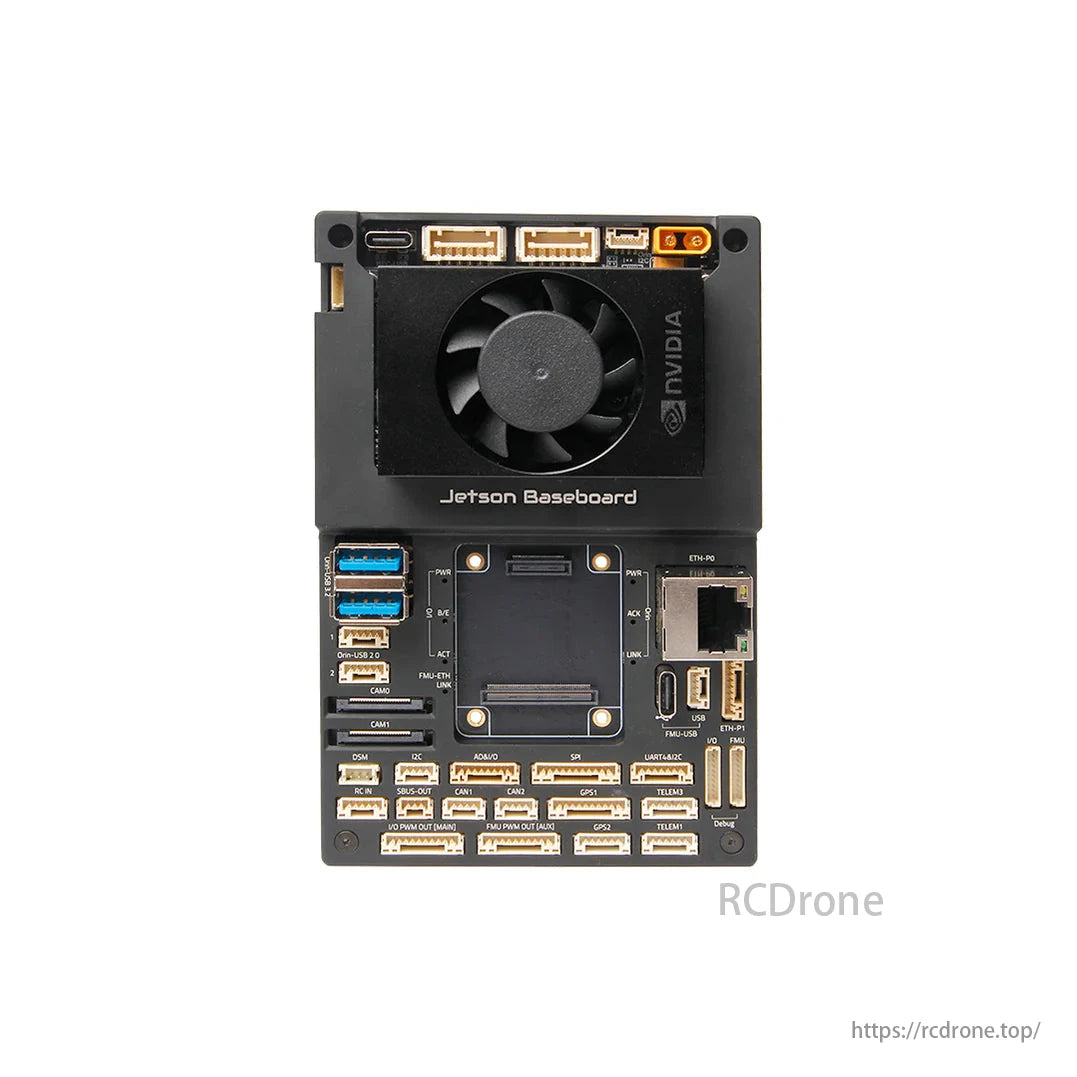
Le Plinthe Holybro Pixhawk Jetson est conçu sur la base de la Spécification open source du bus de pilotage automatique Pixhawk (PAB) et s'intègre parfaitement à la Carte porteuse NVIDIA Jetson Orin NX/Nano. Le Facteur de forme PAB permet la compatibilité avec n'importe quel contrôleur de vol PAB, y compris le Pixhawk 6X. Cette carte combine la puissance de calcul de NVIDIA Jetson avec les capacités de contrôle de vol de Pixhawk, ce qui le rend idéal pour les applications autonomes avancées.
Caractéristiques principales
-
Système unifié : Moissonneuses-batteuses Pixhawk et NVIDIA Jetson dans une seule planche.
-
Connectivité transparente : Jetson et Pixhawk communiquent via Commutateur UART, CAN et Ethernet.
-
Large compatibilité : Soutient Jetson Orin NX et Orin Nano.
-
Extension à grande vitesse : Caractéristiques 2x emplacements pour clés M.2 pour WiFi/Bluetooth et SSD NVMe.
-
Intégration Pixhawk 6X : Equipé de Capteurs ICM-45686 pour un contrôle de vol amélioré.
Processeurs et capteurs
Processeur FMU :
-
STM32H753
-
Processeur ARM Cortex-M7 32 bits, 480 MHz
-
Mémoire flash 2 Mo, RAM 1 Mo
Processeur IO :
-
STM32F103
-
Processeur ARM Cortex-M3 32 bits, 72 MHz
-
64 Ko de mémoire SRAM
Capteurs embarqués (Rev8)
-
Accéléromètre/Gyro : 3x ICM-45686 (avec la technologie BalancedGyro™)
-
Baromètre: ICP20100 et BMP388
-
Magnétomètre : BMM150
Ports et connectivité de la carte mère
Connecteurs Jetson
-
2 ports Gigabit Ethernet (Connecté à Jetson et au pilote automatique via Commutateur Ethernet RTL8367S)
-
2 entrées de caméra MIPI CSI (4 voies chacune, Caméra Raspberry Pi FFC 22 broches)
-
2 ports hôtes USB 3.0 (USB-A, limite de courant de 5 A)
-
2x USB 2.0 ports hôtes (JST-GH à 5 broches)
-
USB 2.0 pour le débogage (USB-C)
-
Sortie mini-HDMI
-
2 emplacements M.2 :
-
Clé M (2242) pour SSD NVMe (PCIEx4)
-
Clé E (2230) pour WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Port CAN (Connecté à Pilote automatique CAN2, JST-GH à 4 broches)
-
Ports SPI, I2C, I2S, UART (Divers connecteurs JST-GH)
-
Port d'alimentation du ventilateur
-
Puissance d'entrée : Connecteur XT30, 7-21 V (3S-4S)
-
UBEC 12A (3-14S) Recommandé pour les applications >4S
Connecteurs du pilote automatique
-
Interface du bus de pilotage automatique Pixhawk : Hirose DF40 100 broches et 50 broches
-
Entrées redondantes du module d'alimentation numérique
-
Prise en charge du moniteur d'alimentation I2C
-
Ports GPS et commutateur de sécurité : JST-GH 10 broches et 6 broches
-
2 ports CAN (4 broches JST-GH)
-
3 ports de télémétrie (JST-GH, un connecté à l'UART1 de Jetson)
-
16 sorties PWM (2x 10 broches JST-GH)
-
USB 2.0 (USB-C et JST-GH à 4 broches)
-
Entrée DSM (JST-ZH à 3 broches, pas de 1,5 mm)
-
Entrée RC (PPM/SBUS, JST-GH 5 broches)
-
Port SPI pour bus de capteur externe (SPI5, JST-GH 11 broches)
-
2 ports de débogage (FMU et IO, JST-SH 10 broches)
Exigences en matière d'alimentation
-
Tension d'entrée : 7-21 V (3S-4S) via le connecteur XT30
-
Exigences de puissance minimales : 8V/3A (varie en fonction des périphériques)
-
Prend en charge l'UBEC externe 12A (3-14S) pour les applications de redondance et de tension plus élevée
-
Protection intégrée contre les surtensions
Dimensions et poids
-
Taille de la carte : 126 x 80 x 38 mm (sans Jetson et contrôleur de vol)
-
Poids: 203.2g (Y compris Jetson, dissipateur thermique, contrôleur de vol, SSD, module Wi-Fi)
Spécifications de l'UBEC-12A
-
Tension d'entrée : 3 à 14S (XT30)
-
Tension de sortie : 6,0 V/7,2 V/8,0 V/9,2 V (7,2 V recommandé pour Jetson)
-
Courant de sortie continu : 12A
-
Courant de sortie en rafale : 24A
-
Taille: 48 x 33,6 x 16,3 mm
-
Poids: 47,8 g
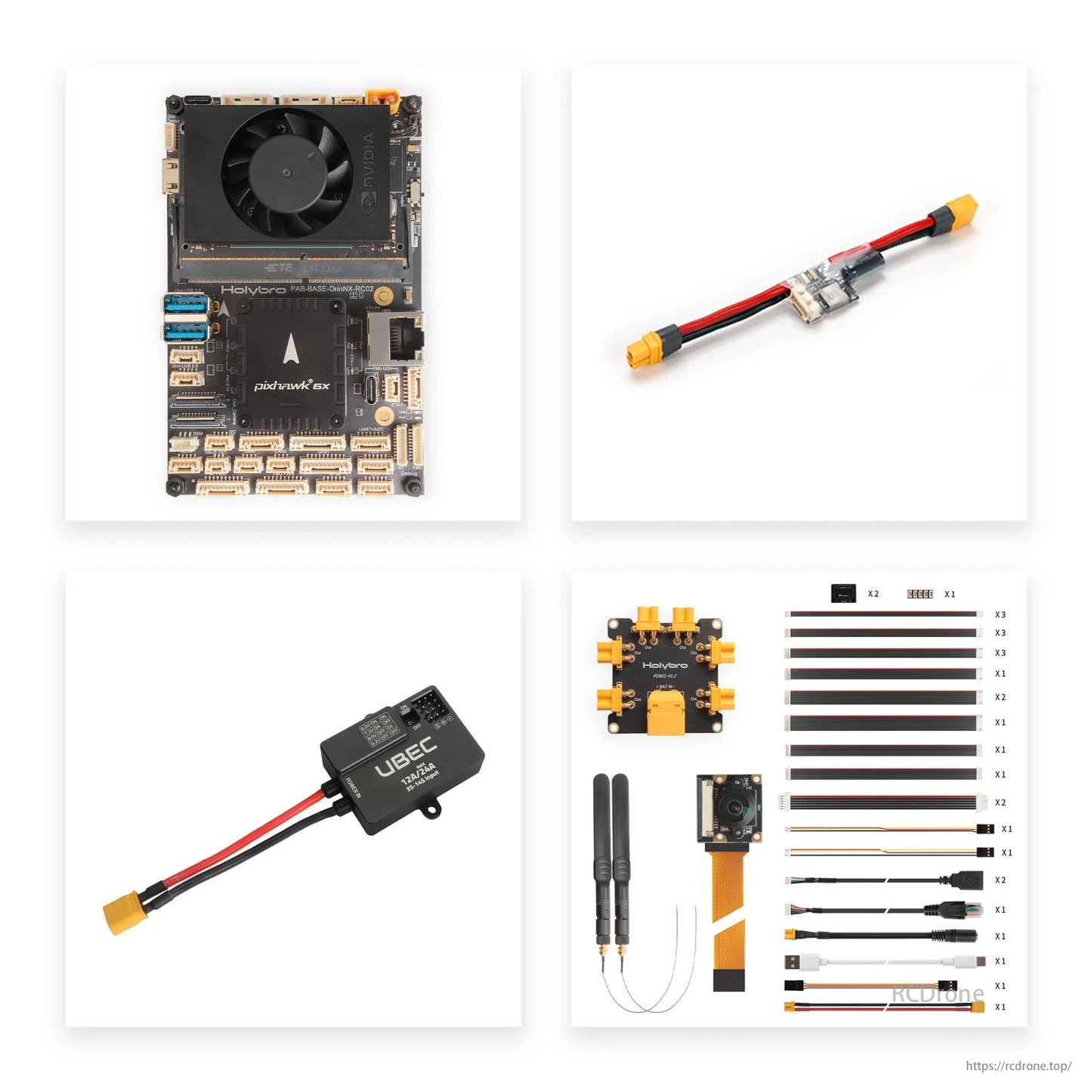
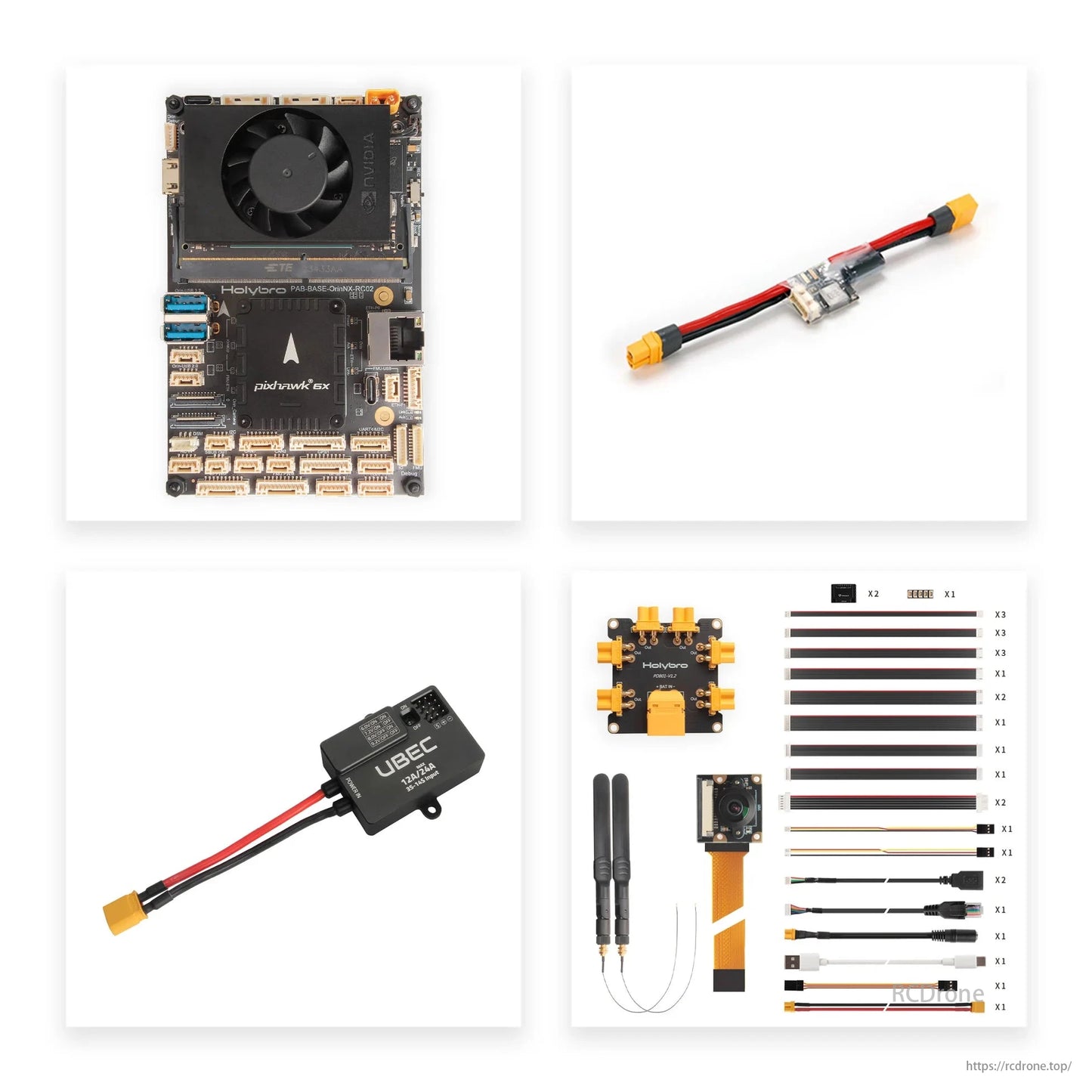
Contenu du colis
Pack Pixhawk 6X
-
Module de contrôleur de vol Pixhawk 6X (ICM-45686)
-
Plinthe Jetson Orin de Pixhawk
-
Nvidia Orin NX (16 Go de RAM) / Orin Nano (4 Go de RAM) avec dissipateur thermique et ventilateur
-
Disque SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 Go
-
Module Wi-Fi et Bluetooth : Intel 8265NGW Double bande AC / Realtek RTL8B22CE
-
Caméra: IMX219-200
-
Module d'alimentation PM02D
-
UBEC 12A (3-14S)
-
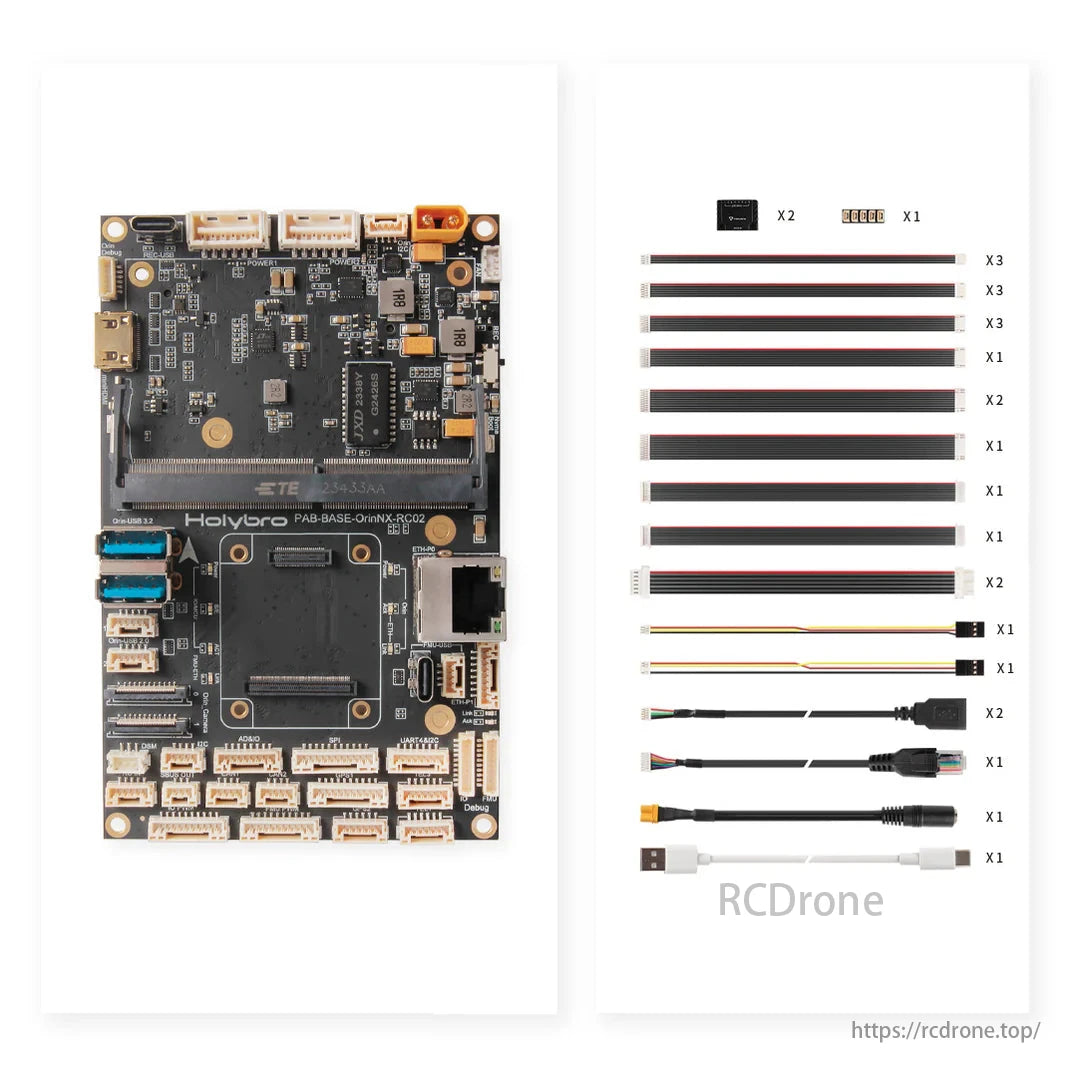
Ensemble de cartes et de câbles PDB
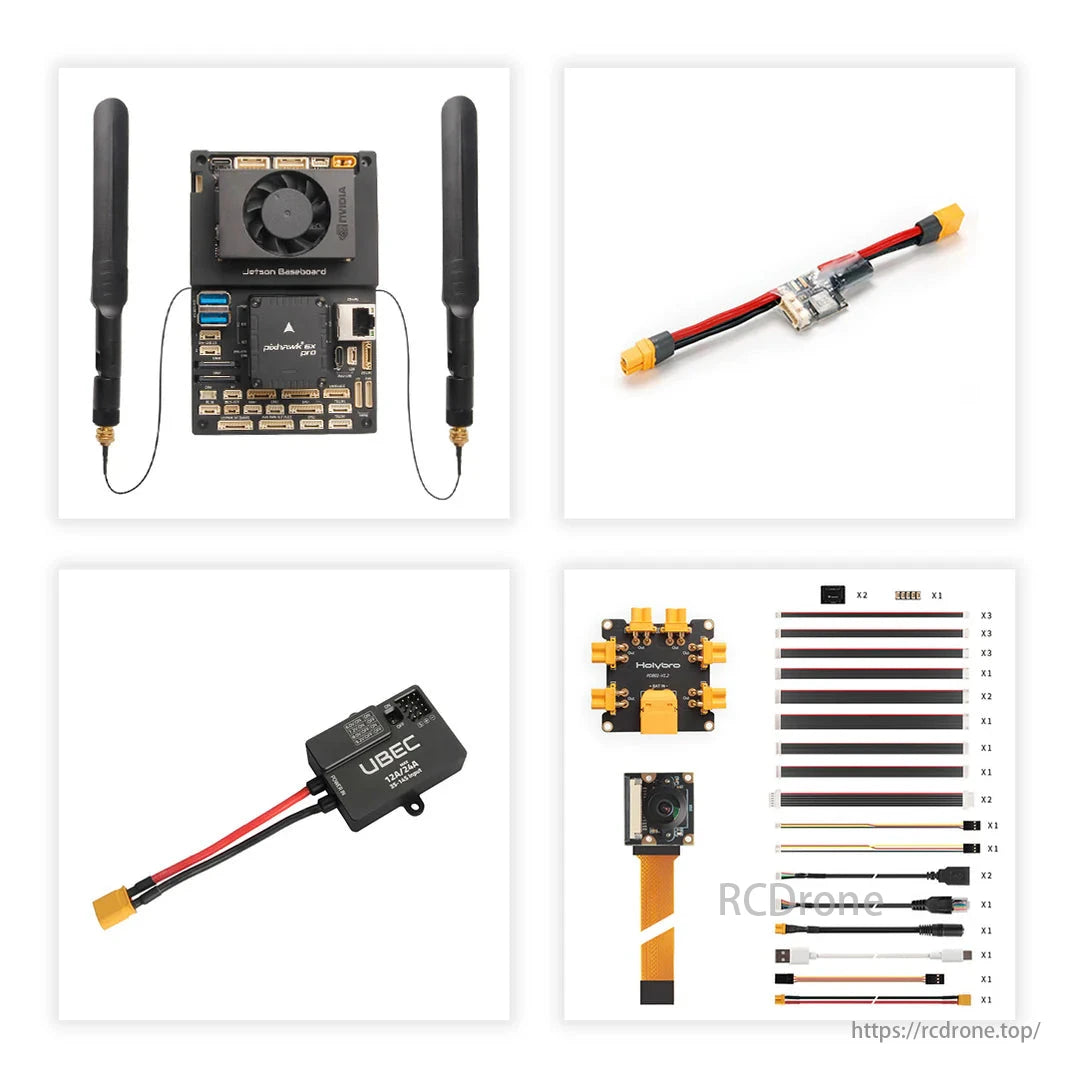
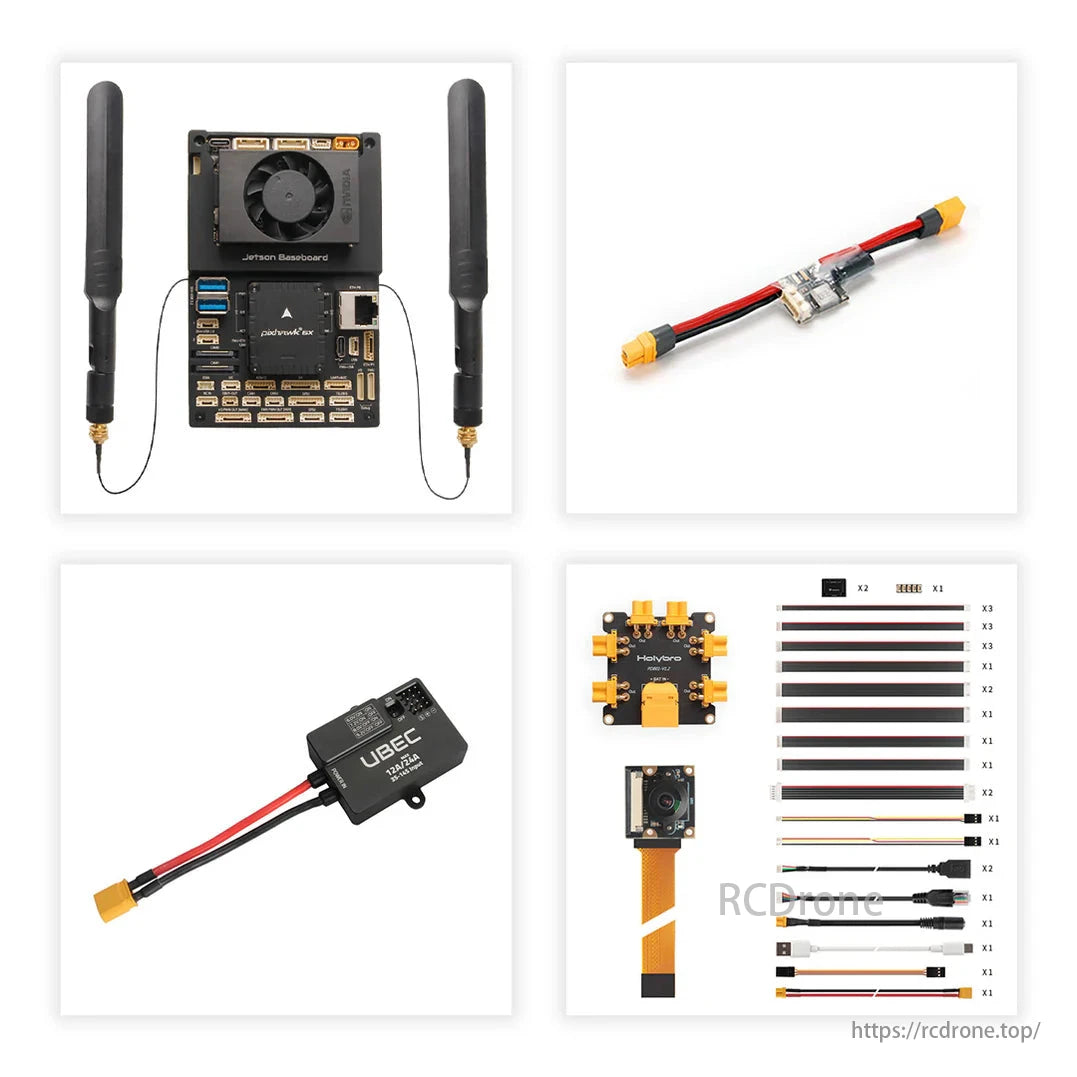
Pack Pixhawk 6X Pro
-
Module de contrôleur de vol Pixhawk 6X Pro
-
Plinthe Pixhawk Jetson Orin (avec ou sans étui)
-
Nvidia Orin NX (16 Go de RAM) / Orin Nano (4 Go de RAM) avec dissipateur thermique et ventilateur
-
SSD, module Wi-Fi/Bluetooth, appareil photo, module d'alimentation PM02D, UBEC 12A, carte PDB, jeu de câbles
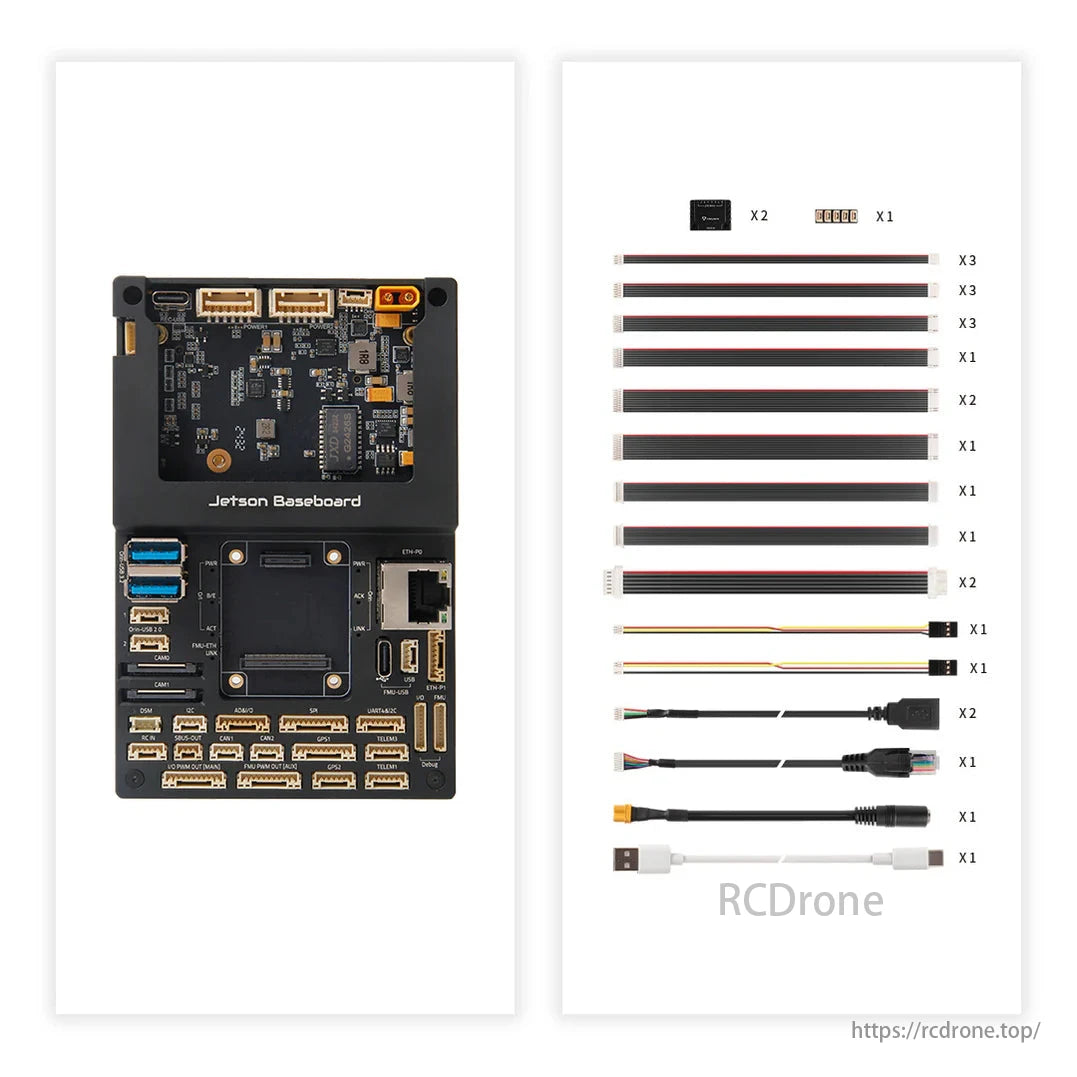
Plinthe Jetson uniquement
-
Plinthe Pixhawk Jetson Orin (avec ou sans étui)
-
Jeu de câbles
Liens de référence
Identifiants de connexion par défaut pour Jetson Orin :
-
IDENTIFIANT:
saint frère -
Mot de passe:
123
Détails




Pixhawk et Nvidia Jetson combinés dans une seule carte.

Nvidia jetson connecté via uart can et commutateur Ethernet à l'aide d'un connecteur RJ45 pour les systèmes de pilotage automatique
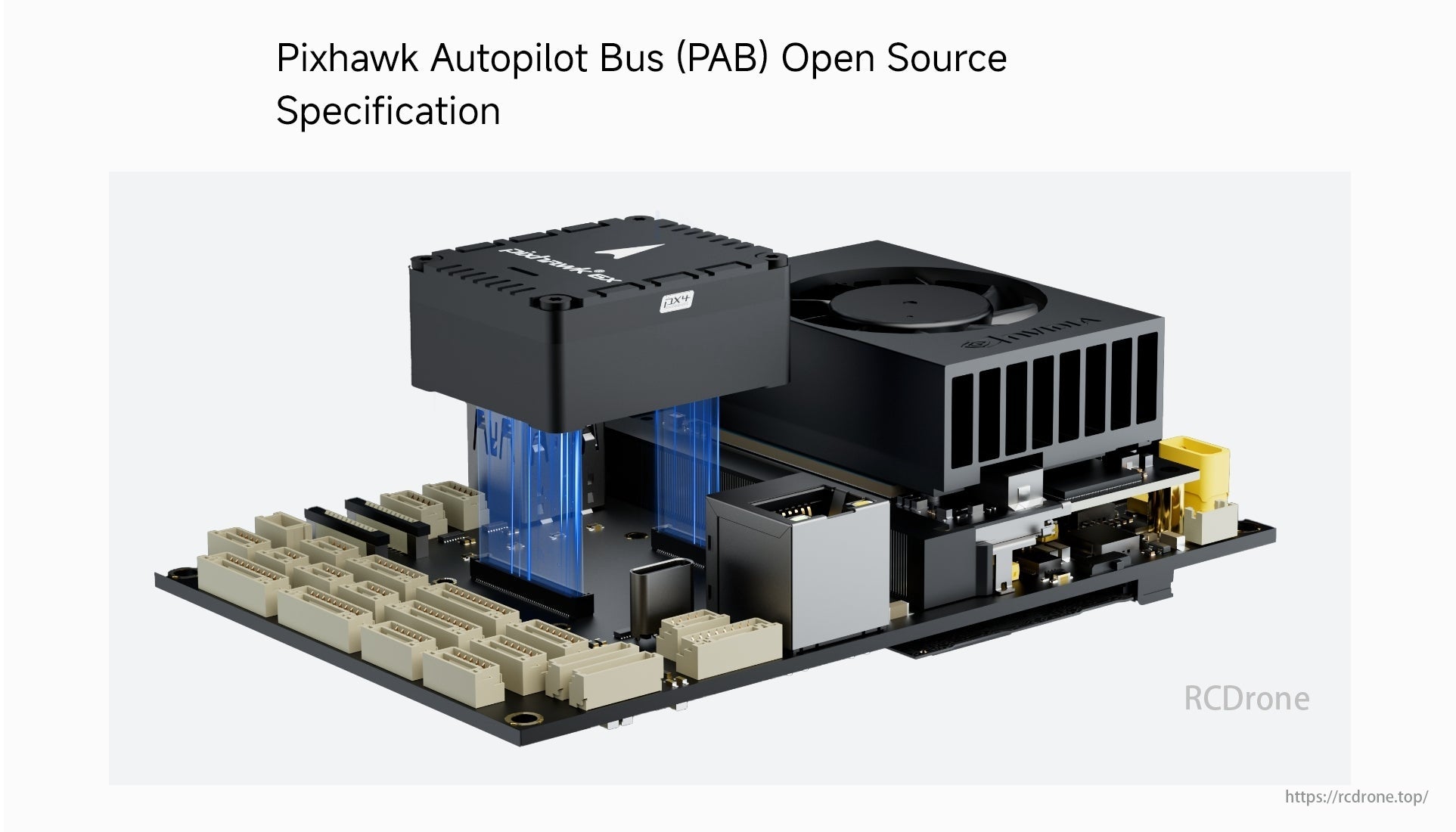
Spécification Open Source du bus de pilotage automatique Pixhawk (PAB)

Système de connecteurs Jetson SoDIMM entièrement compatible : Jetson Orin NX/Nano

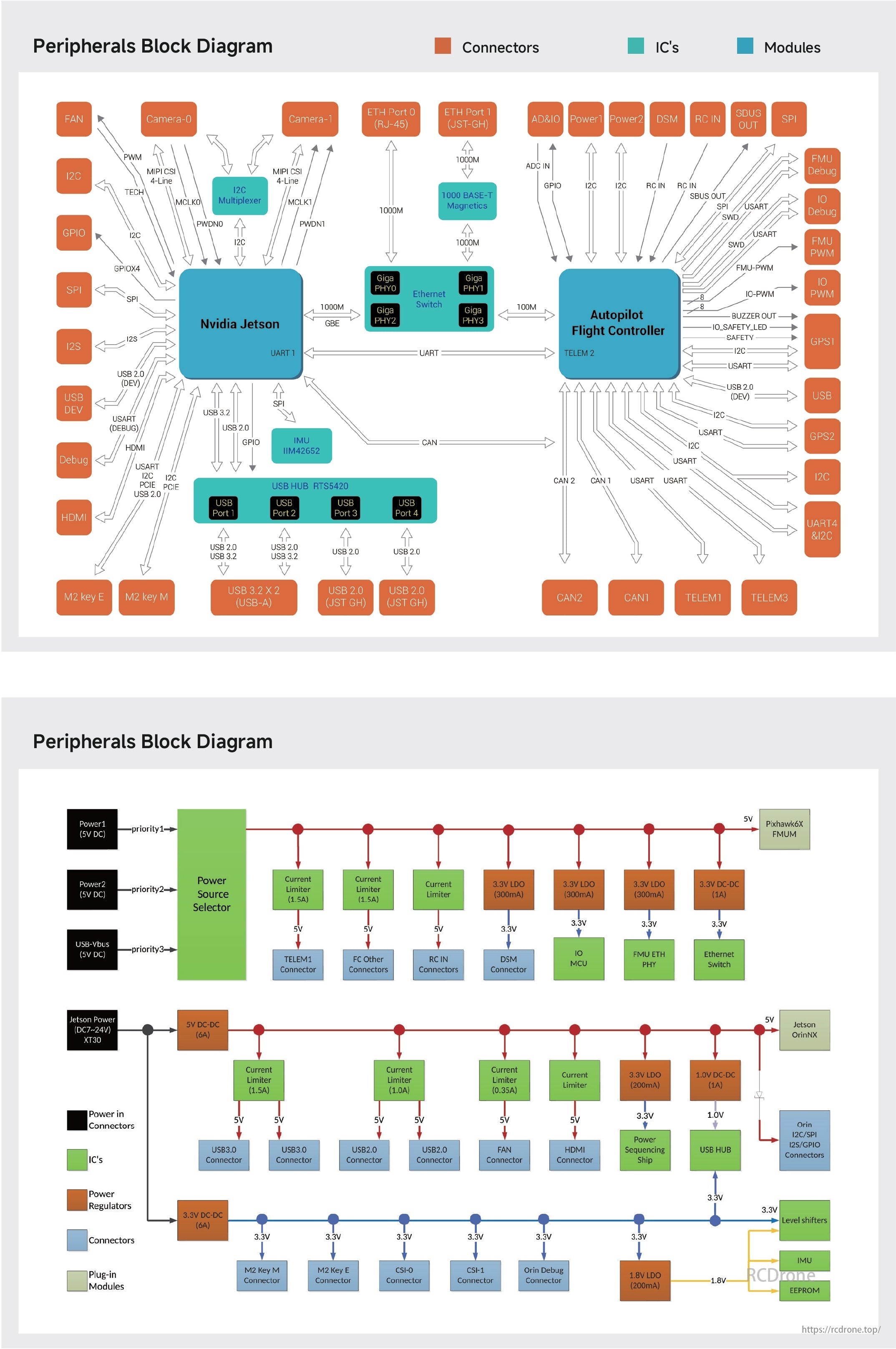
L'image montre un schéma fonctionnel des périphériques d'un système embarqué, comprenant des composants tels que le Nvidia Jetson et le contrôleur de vol Autopilot. Il comprend divers connecteurs, circuits intégrés et modules tels que des ports USB, des commutateurs Ethernet et des régulateurs de puissance, illustrant leurs interconnexions et leur flux de données.
Schéma de câblage de référence

Deux schémas illustrent les systèmes de distribution d'énergie pour un module Jetson utilisant une batterie. Le schéma de gauche utilise un module d'alimentation PM02D et une carte de distribution d'énergie, tandis que le schéma de droite inclut un UBEC externe pour les batteries supérieures à 4S.Les deux configurations assurent une régulation de tension appropriée pour le Jetson et le Pixhawk Power.
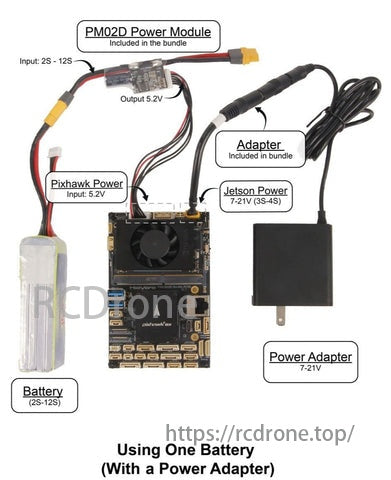
Le module d'alimentation PM02D connecte la batterie à Pixhawk et Jetson, en utilisant une batterie avec un adaptateur secteur pour une entrée 7-21 V.
Related Collections