Kit de développement Holybro X500 v2 PX4 - Kit drone en fibre de carbone avec Holybro Pixhawk 6C / 6X, GPS M8N, radio de télémétrie SiK, drone industriel
Kit de développement Holybro X500 v2 PX4 - Kit drone en fibre de carbone avec Holybro Pixhawk 6C / 6X, GPS M8N, radio de télémétrie SiK, drone industriel
HolyBro
Prix habituel
$769.00 USD
Prix habituel
Prix promotionnel
$769.00 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
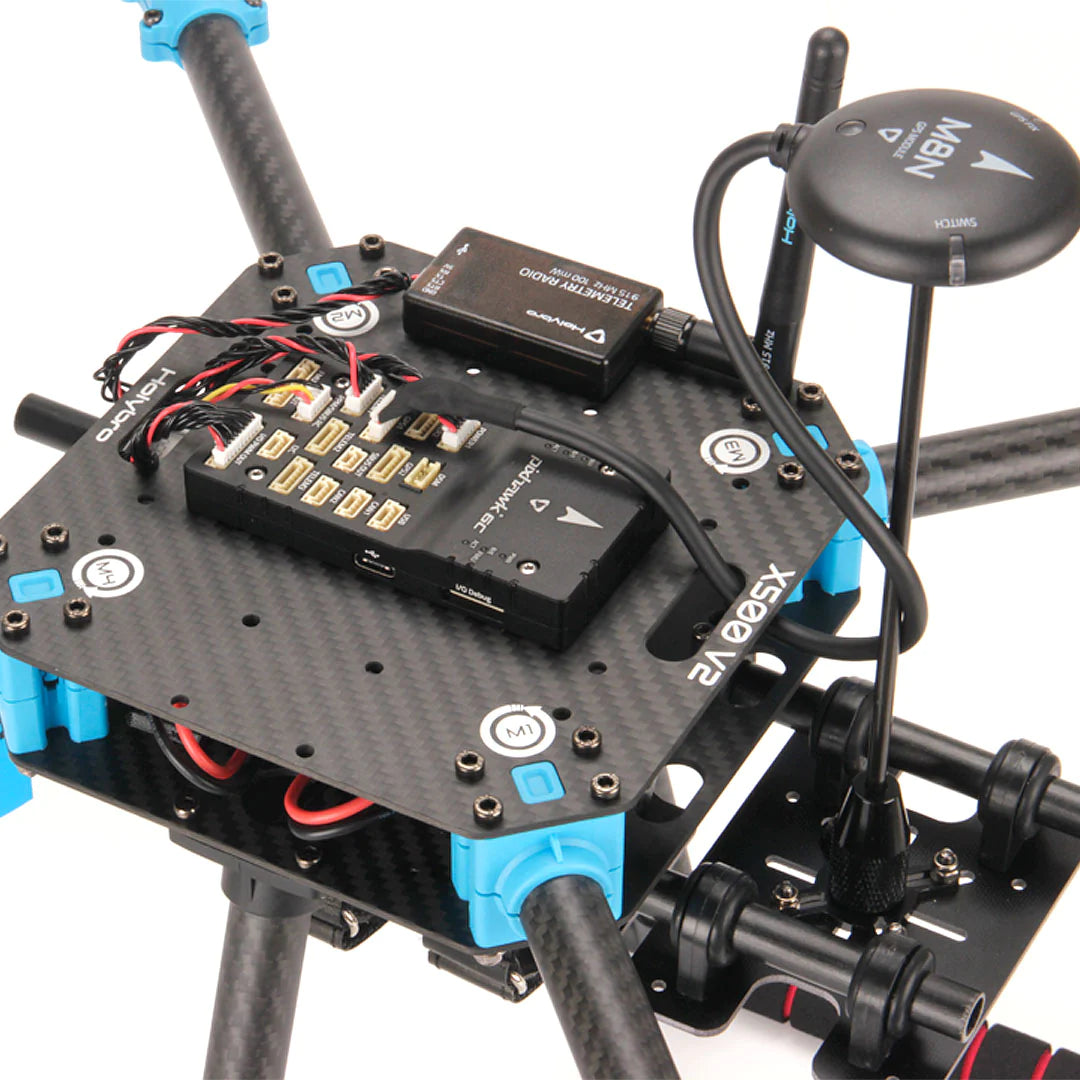
Kit de développement PX4 - X500 v2 est un kit de drone de développement professionnel en fibre de carbone abordable, léger et robuste avec le dernier Holybro Pixhawk 6C ou Pixhawk 6X Contrôleur de vol de pilote automatique, GPS M8N et radio de télémétrie SiK plug & play. Il est rapide et facile à assembler (environ 30 minutes) sans avoir besoin de soudure, vous pouvez donc passer plus de temps à voler et à développer. Il est livré avec le kit de cadre X500 V2 et des moteurs, des ESC, des tableaux de distribution d'énergie et des hélices supplémentaires. Les bras de drone sont préinstallés avec des moteurs et des ESC afin qu'ils puissent être branchés directement sur le tableau de distribution d'alimentation sans avoir besoin de soudure.
Le cadre (X500 v2) est fabriqué en sergé entièrement en fibre de carbone, avec des bras en tube de fibre de carbone soutenus par les nouveaux connecteurs en nylon renforcé de fibre avec des encoches pratiques sur côté moteur et côté carrosserie, offrant une installation beaucoup plus facile et plus directe. Le train d'atterrissage se compose de tubes en fibre de carbone de 16 mm et 10 mm de diamètre avec des connecteurs qui ont été épaissis et renforcés.
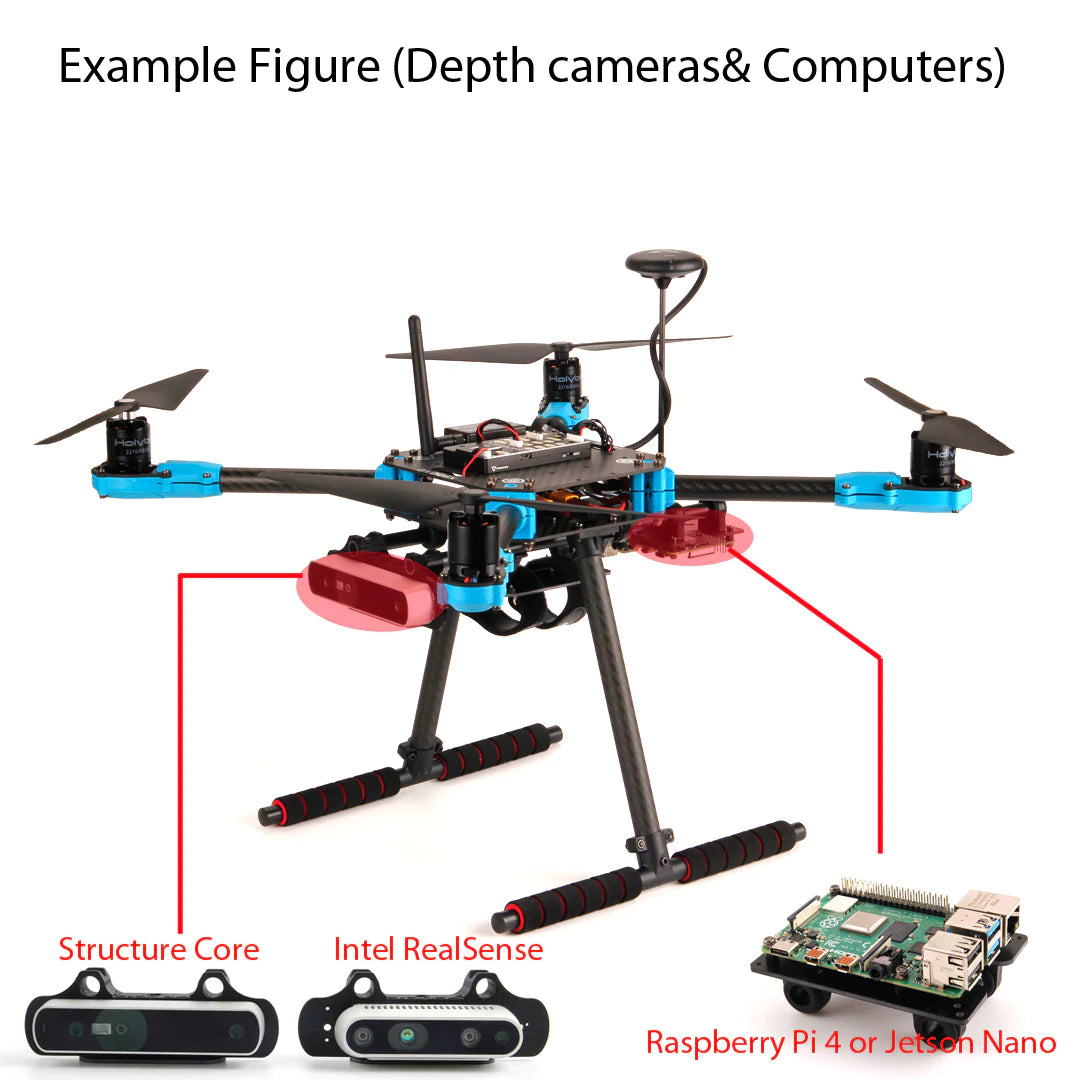
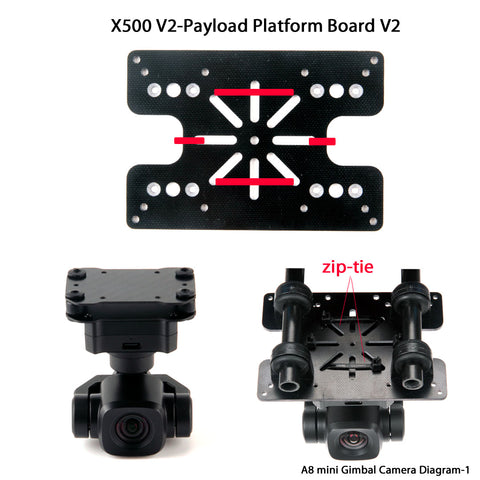
La carte de plate-forme comporte désormais des trous de montage pour le GPS et les ordinateurs compagnons populaires tels que le Raspberry Pi 4 et le Jetson Nano. Il existe un support de caméra de profondeur en option (à acheter séparément) pour diverses caméras de profondeur telles que la série Intel RealSense et les caméras de profondeur Structure Core. L'espacement entre les plaques supérieure et inférieure en fibre de carbone a été augmenté pour faciliter l'accès. La carte de montage de batterie réglable a été agrandie pour prendre en charge des batteries plus grosses pour une durée de vol plus longue. Le système de montage sur rail est prêt à accueillir toute une série de supports de caméra et de cardans pour diverses applications. Tous les outils d'installation sont fournis dans le package.
Remarque : Le contrôleur de vol Pixhawk 6C est compatible avec PX4 et Ardupilot, mais il est livré avec le micrologiciel de pilote automatique open source PX4.
Fonction :
- Tout nouveau Pixhawk 6C ou Contrôleur de vol Pixhawk 6X avec M10 Module GPS et Plug & play SiK Telemetry Radio
- Nouveau design de cadre avec un temps d'assemblage minimal (~ 30 minutes), aucune soudure requise
- Cadre en fibre de carbone avec connecteurs en nylon renforcé de fibres permettant une installation facile et directe
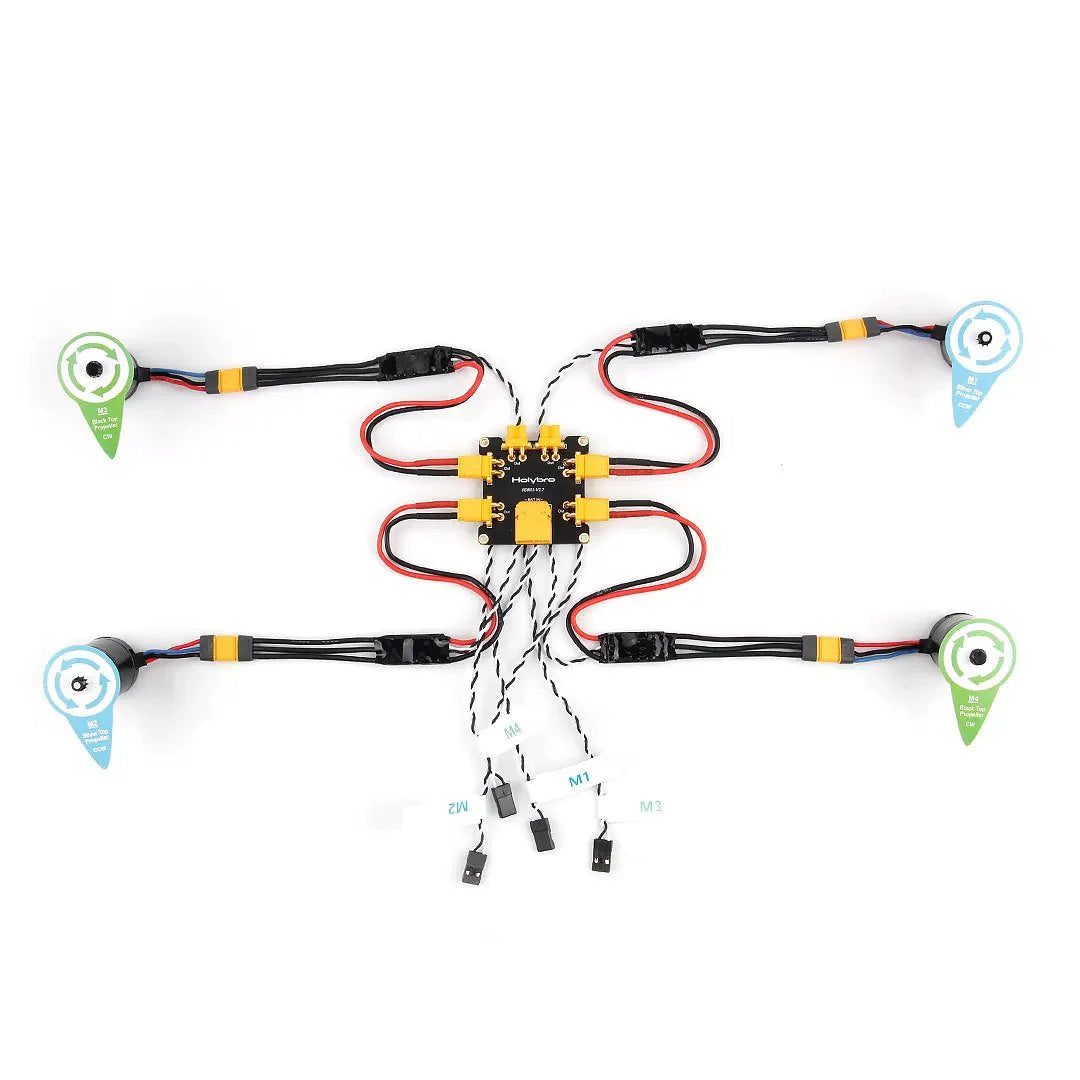
- Moteurs et ESC préinstallés avec de simples fiches d'alimentation XT30 pour PDB
- Carte de distribution d'alimentation (PDB) avec fiches XT60 et XT30
- Support pour ordinateur compagnon tel que Raspberry Pi et Nvidia Jetson Nano
- Support de caméra de profondeur en option pour Intel RealSense et Structure Core
Remarque :
- La version Pixhawk 6X est désormais livrée avec la version PM02D-HV (haute tension). Dans PX4, vous devez définir SENS_EN_INA228 pour activer cela. Cette version HV n'est prise en charge que dans ardupilot 4.4 et versions ultérieures. Le guide de configuration est disponible ici.
-
Prise en charge du micrologiciel pour le GPS M10 : PX4 1.14 et ArduPilot 4.3 ou version ultérieure sont requis.
Kit de développement PX4 - X500 v2 comprenant :
- Contrôleur de vol du pilote automatique : Pixhawk 6C (boîtier en plastique) & PM02 V3 ou Pixhawk 6X (base standard) & PM02D
- Module GPS M10
- Radio de télémétrie SiK V3 433/915 MHz
- Kit de cadre X500 V2 (SKU30120)
-
Éléments préinstallés :
- Moteurs - Moteur Holybro 2216 KV920 (4 pièces) avec prise XT30 (les spécifications du moteur peuvent être trouvées ici)
- ESC - BLHeli S ESC 20A (4 pièces) avec fiches XT30 - Compatible avec la batterie 4S
- 1 045 hélices (6 pièces)
- Carte de distribution d'alimentation (prise XT60 pour batterie et prise XT30 pour ESC et périphériques)
-
Autres éléments facultatifs (vendus séparément)
- Contrôleur RC RadioMaster TX16S
- Récepteur RadioMaster R81
- Support de caméra de profondeur
Détails du kit de cadre X500 V2 (SKU30120) :
- Corps - Plaque supérieure et inférieure entièrement en fibre de carbone (144 x 144 mm, 2 mm d'épaisseur)
- Bras – Tubes en fibre de carbone de 16 mm haute résistance et ultra-légers avec connecteurs en nylon renforcé de fibres de nouvelle conception
- Train d'atterrissage – Tubes en fibre de carbone de 16 mm et 10 mm de diamètre avec connecteurs en T en plastique renforcés et améliorés.
- Carte plate-forme – Avec trous de montage pour GPS et ordinateur compagnon populaire tel que le Raspberry Pi 4 et Jetson Nano
- Système de montage double tige de 10 mm de diamètre x 250 mm de long sur rail
- Support de batterie avec deux sangles de batterie
- Outils manuels pour l'installation
Spécifications mécaniques :
- Empattement : 500 mm
- Modèle de montage du moteur : 16 x 16 mm
- Corps du cadre : 144 x 144 mm, 2 mm d'épaisseur
- Hauteur du train d'atterrissage : 215 mm
- Espace entre les plaques supérieure et inférieure : 28 mm
- Poids : 610g
- Durée de vol : environ 18 minutes de vol stationnaire sans charge utile supplémentaire. Testé avec une batterie de 5 000 mAh.
- Charge utile : 1 500 g (sans batterie, accélérateur à 70 %)
- Recommandation de batterie : 4S 3000-5000mAh 20C+ avec batterie Lipo XT60 (non incluse)

Guide d'assemblage X500 v2
Référence :
Spécifications du moteur
Impression 3D :
Holybro_X500_V2_Impression 3DGuide de configuration :
Article sur l'idorobotique
Guide de configuration du PX4
Guide de configuration d'Ardupilot
Quelques conseils :
Related Collections