


Main Inspire Robots RH56DFTP Main de robot habile – 6 DOF, prise 30N, capteurs de force tactiles, contrôle ModbusTCP+CAN
Main Inspire Robots RH56DFTP Main de robot habile – 6 DOF, prise 30N, capteurs de force tactiles, contrôle ModbusTCP+CAN
Inspire Robots
Impossible de charger la disponibilité du service de retrait
Aperçu
La main bionique intelligente Inspire Robots RH56DFTP est une main à cinq doigts de haute précision conçue pour des applications robotiques avancées. Dotée de 6 degrés de liberté, 12 articulations, et d'une combinaison de 6 capteurs de force et 17 capteurs tactiles, elle offre une dextérité et une perception tactile semblables à celles des humains. Avec une force au bout des doigts de 30N (≈3 kg par doigt), un mouvement angulaire à grande vitesse, et une communication fluide ModbusTCP+CAN (RS485), cette main est idéale pour la recherche, l'automatisation industrielle et la robotique bionique.
Caractéristiques clés
-
Précision tactile semblable à celle des humains : Les capteurs tactiles intégrés offrent une perception en temps réel pour une manipulation précise des objets.
-
Prise forte et stable : Chaque doigt fournit jusqu'à 3 kg de force d'actionnement, permettant une saisie fiable de divers objets.
-
Auto-verrouillage en cas de perte de puissance : Maintient la position lorsqu'il est hors tension, éliminant ainsi le besoin de recalibrage au démarrage.
-
Fonctionnement à grande vitesse : Le mouvement du pouce dépasse 130°/s, tandis que le mouvement à quatre doigts atteint 200°/s pour un contrôle réactif.
-
Durable et fiable : Conçu pour une utilisation à long terme dans les laboratoires de recherche, les plateformes robotiques et les environnements industriels.
Spécifications
| Paramètre | Valeur |
|---|---|
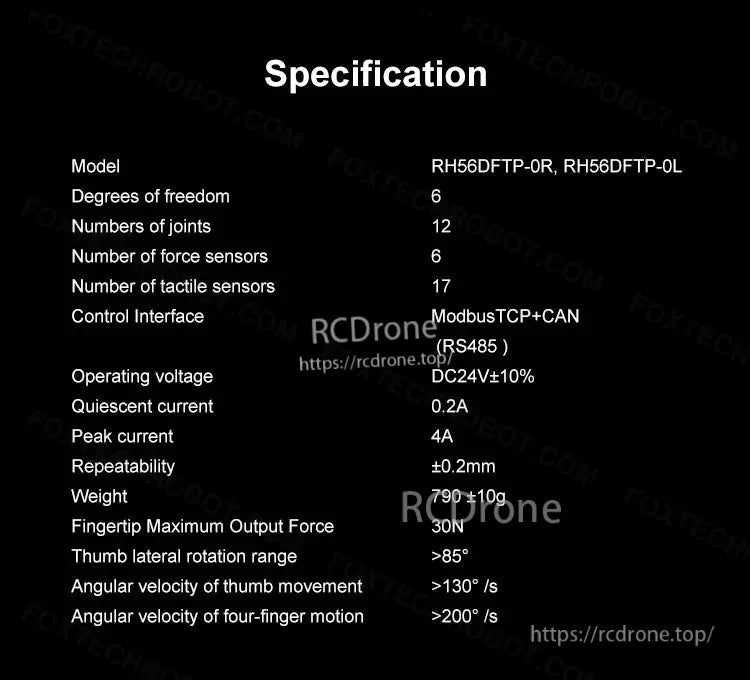
| Modèle | RH56DFTP-0R, RH56DFTP-0L |
| Degrés de liberté | 6 |
| Nombre de joints | 12 |
| Capteurs de force | 6 |
| Capteurs tactiles | 17 |
| Interface de contrôle | ModbusTCP + CAN (RS485) |
| Tension de fonctionnement | DC 24V ±10% |
| Courant au repos | 0.2A |
| Courant de pointe | 4A |
| Répétabilité | ±0.2mm |
| Poids | 790g ±10g |
| Force de sortie maximale au bout des doigts | 30N (≈3 kg) |
| Plage de rotation latérale du pouce | >85° |
| Vitesse angulaire – pouce | >130°/s |
| Vitesse angulaire – quatre doigts | >200°/s |
Applications
-
Recherche et Développement : Recherche en robotique avancée dans les universités et laboratoires.
-
Automatisation Industrielle : Tâches d'assemblage et de manipulation de haute précision.
-
Solutions Bioniques : Études de mains prothétiques et robotique humanoïde.
-
IA et Apprentissage Automatique : Projets de détection tactile et de manipulation nécessitant un retour d'information précis en temps réel.
Points forts
Le RH56DFTP excelle dans les tâches nécessitant un contrôle de force précis et des opérations délicates, telles que la cueillette de myrtilles, de tomates cerises ou de raisins sans causer de dommages. Il gère également une prise à haute force pour des applications industrielles robustes, ce qui en fait une solution polyvalente pour des tâches de manipulation complexes.
Détails
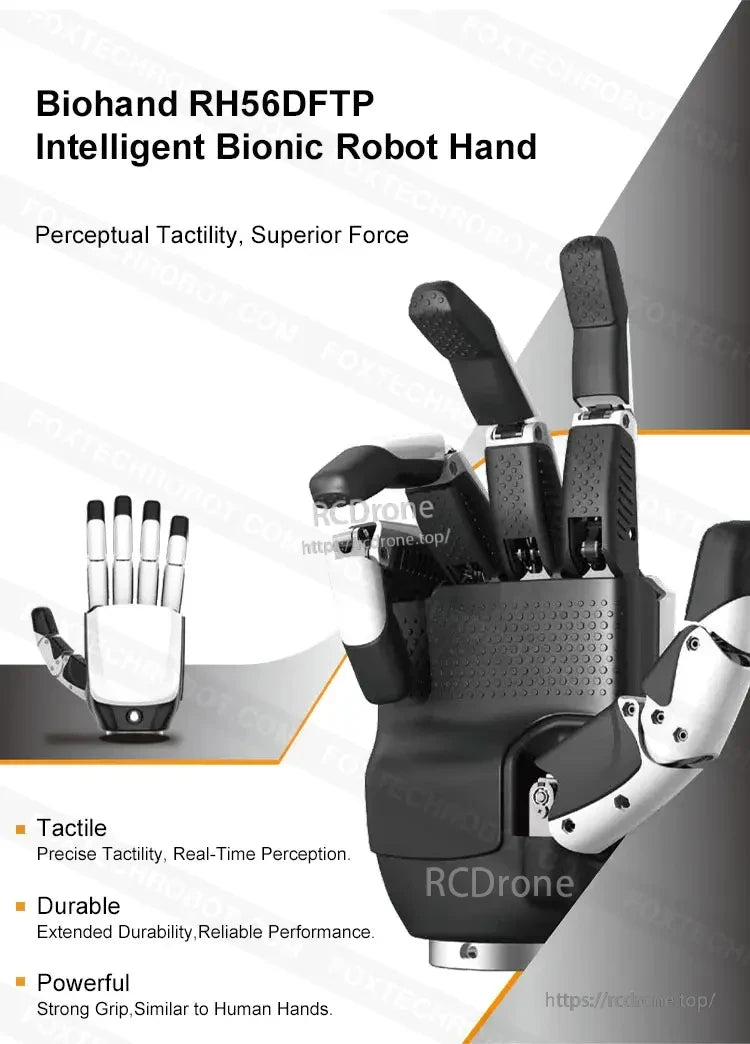
La main robotique bionique intelligente Biohand RHS6DFTP offre une tactilité perceptuelle, une force supérieure et une tactilité précise en temps réel, avec une durabilité prolongée pour des performances fiables et une prise puissante similaire à celle des mains humaines.

Main robotique avec six degrés de liberté, conçue pour la précision et la dextérité, parfaite pour diverses applications telles que la chirurgie, l'assemblage ou le travail en laboratoire.

Prise puissante, performance semblable à celle d'un humain. Force d'activation de 3 kg par doigt.Main d robot habile avec un design avancé et une ingénierie de précision.


Mécanisme de verrouillage automatique en cas de perte de puissance maintient la position stable et fiable sans nécessiter de remise à zéro au démarrage ou à l'arrêt.


Outil multifonction avec capteur de force, adapté pour cueillir et pincer de petits fruits comme les myrtilles, les tomates cerises et les raisins.

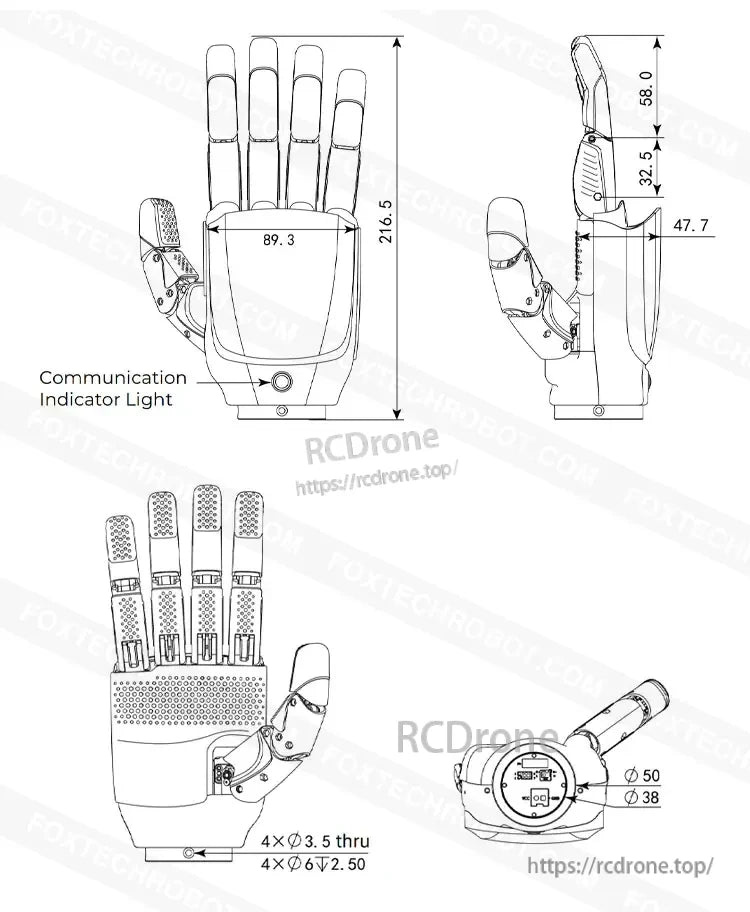
Indicateur de communication, 8 x 47,7 mm, 89 mm de long, sans LED, 5x5 : 38-4x03,5 à 4xp6v2, 50 ohms, 2 couches
Le modèle de spécification RHS6DFTP-OR et RHS6DFTP-OL dispose de 3 degrés de liberté, 12 articulations et 17 capteurs de force et capteurs tactiles. Il utilise une interface de contrôle Modbus TCP+CAN (RS485) avec une tension de fonctionnement de DC24V +10%.



Related Collections


