

Série JUXIE INTELLIGENT CE-HM-R68, 48 V 175 W, 51:1/101:1, 17/33 Nm, Moteur robotisé à double encodeur 19 bits pour articulations
Série JUXIE INTELLIGENT CE-HM-R68, 48 V 175 W, 51:1/101:1, 17/33 Nm, Moteur robotisé à double encodeur 19 bits pour articulations
JUXIE INTELLIGENT
Impossible de charger la disponibilité du service de retrait
Aperçu
La série JUXIE INTELLIGENT CE-HM-R68 est un moteur robotique compact et un module d'articulation conçu pour la robotique humanoïde et mobile. Il intègre un entraînement servo de 48 V, des encodeurs doubles et des rapports de réduction de 51:1 ou 101:1 pour fournir un couple nominal allant jusqu'à 33 Nm et un couple de pointe allant jusqu'à 82 Nm pour les articulations robotiques.
Caractéristiques clés
- Deux configurations : rapports de réduction de 51:1 et 101:1
- Vitesse de sortie nominale : 60 RPM (51:1), 30 RPM (101:1)
- Couple nominal : 17 Nm (51:1), 33 Nm (101:1) ; couple de pointe jusqu'à 41/82 Nm
- Faible jeu : 15 arcsec
- Servo de 48 V, 175 W avec une vitesse de moteur nominale de 3000 RPM
- Encodeurs doubles avec une résolution absolue de 19 bits sur un tour
- Interfaces : EtherCAT/CAN ; boucles de contrôle : courant 50 kHz, vitesse 10 kHz
- Taille compacte R68 x 66,3 mm ; poids 0.8 kg
- Convient pour les articulations des épaules, coudes, genoux et hanches des robots humanoïdes
Spécifications
| Paramètre | 51:1 | 101:1 |
|---|---|---|
| Vitesse de sortie (RPM) | 60 | 30 |
| Couple nominal (Nm) | 17 | 33 |
| Couple de pointe (Nm) | 41 | 82 |
| Jeu (arcsec) | 15 | 15 |
| Tension nominale (V) | 48 | 48 |
| Puissance nominale (W) | 175 | 175 |
| Vitesse nominale du moteur (RPM) | 3000 | 3000 |
| Courant nominal (A) | 5.5 | 5.5 |
| Courant de crête (A) | 16 | 16 |
| Encodeur | Encodeurs doubles ; absolu à un tour 19 bits | |
| Interface de pilote | EtherCAT/CAN | |
| Boucles de contrôle | Boucle de courant 50 kHz ; boucle de vitesse 10 kHz | |
| Dimensions globales | R68 x 66,3 mm | |
| Poids total | 0.8 kg | |
| Applications typiques des articulations | Épaule, Coude, Genou, Taille | |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Manuels
- Diagramme de structure du produit HM-R68 (PDF)
- Spécification de communication série SC-0090-C001 (PDF)
Détails
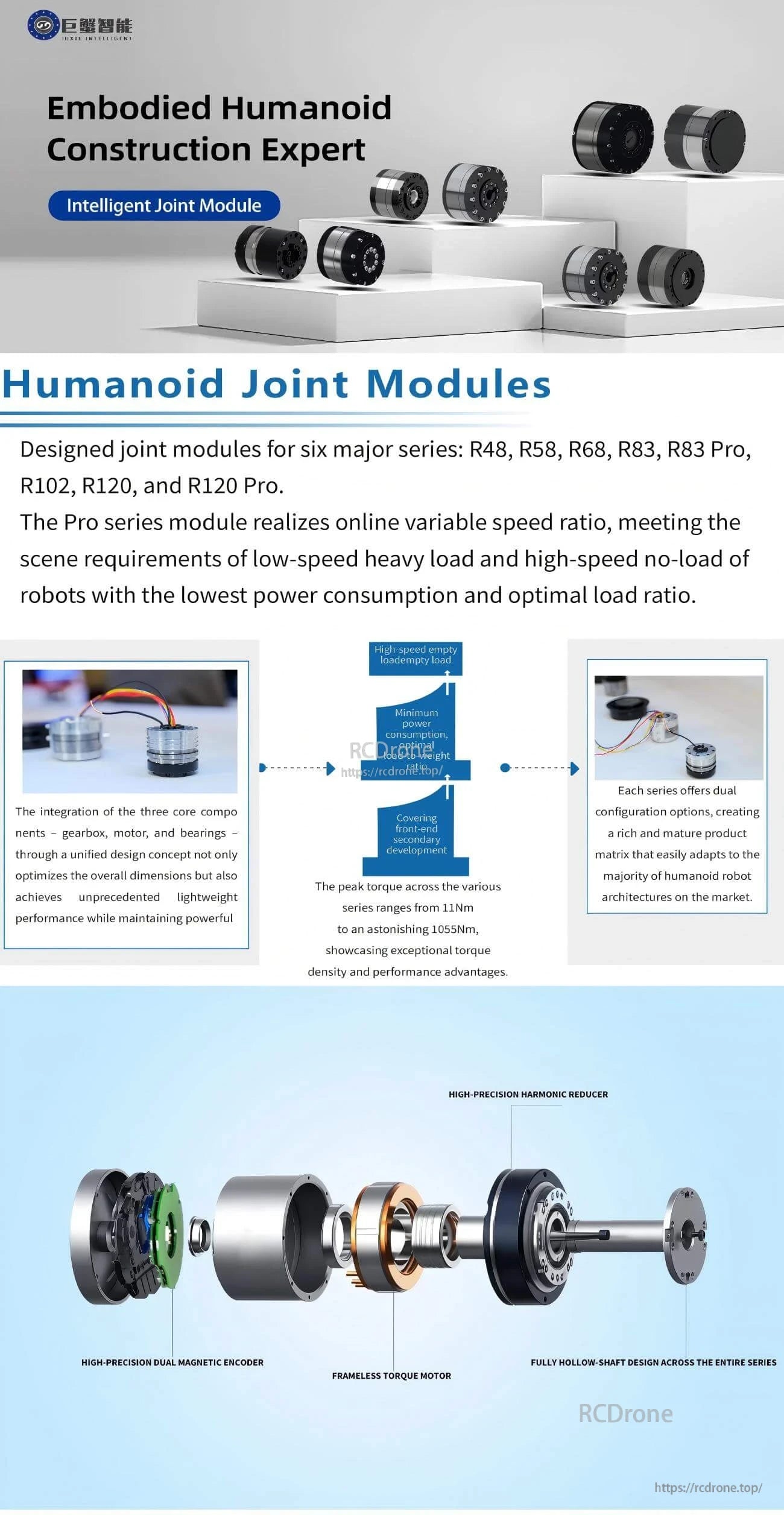
Modules d'articulation humanoïde pour les séries R48, R58, R68, R83, R83 Pro, R102, R120 et R120 Pro. Les caractéristiques incluent un réducteur harmonique de haute précision, un encodeur magnétique double, un moteur de couple sans cadre et un design à arbre entièrement creux. Offre un rapport de vitesse variable, une faible consommation d'énergie et une haute densité de couple.

Trois séries de moteurs robotisés : R48 (48 mm de diamètre extérieur, 4 Nm de couple, 100 PRM), R58 (58 mm de diamètre extérieur, 8 Nm de couple, 90 PRM), R68 (68 mm de diamètre extérieur, 5 Nm de couple, 90 PRM). Tous disposent d'une interface EtherCAT/CAN.

Related Collections

