













LINKERBOT Main L10, main robotique à 10 DoF, contrôle CAN/RS485, entraînement à vis sans fin, force de préhension 80N, DC24V+/-10%
LINKERBOT Main L10, main robotique à 10 DoF, contrôle CAN/RS485, entraînement à vis sans fin, force de préhension 80N, DC24V+/-10%
LINKERBOT
Impossible de charger la disponibilité du service de retrait
Aperçu
LINKERBOT La main robotique Linker Hand L10 est conçue pour une manipulation habile et un contrôle précis. Elle dispose de 10 degrés de liberté avec une transmission à vis sans fin et communique via CAN/RS485 pour une intégration fiable dans les systèmes de recherche et industriels.
Caractéristiques clés
- Main habile à 10 DoF avec transmission à vis sans fin pour une action stable.
- Interfaces de contrôle : CAN et RS485.
- Précision de positionnement répétée < +/-0.2mm ; temps d'ouverture/fermeture typique 1.2s.
- Capacité de force : 15N force maximale au bout du pouce, 15N force maximale au bout des quatre doigts, 80N force maximale de préhension à cinq doigts.
- Modes de contrôle et utilitaires du manuel produit : contrôle de position, contrôle de vitesse, retour haptique (contrôle de force) via des capteurs au bout des doigts, et mise à jour du firmware en ligne.
- Écosystème (par matériaux de produit) : bras robotiques pris en charge UR, Franka, XArm, RealMan, AgileX ; simulateurs pris en charge Pybullet, Isaac, MuJoCo ; exemples d'utilisation incluent ROS1, ROS2, Python, C++ ; méthodes d'acquisition de données incluent des gants de téléopération, des gants d'exosquelette, des gants de détection de métal liquide, vision et VR (Meta Quest 3).
Pour un support avant-vente ou d'intégration, contactez [email protected] or visitez https://rcdrone.top/.
Spécifications
| Degrés de liberté (DoF) | 10 |
| Nombre de joints | 20 (10 Actifs + 10 Passifs) |
| Mode de transmission | Transmission par vis sans fin |
| Interface de contrôle | CAN/RS485 |
| Poids | 800g |
| Charge maximale | 25kg |
| Tension de fonctionnement | DC24V+/-10% |
| Courant statique | 0.2A |
| Courant moyen (mouvement à vide) | 0.5A |
| Courant maximum | 3A |
| Précision de repositionnement | < +/-0.2mm |
| Temps d'ouverture/fermeture | 1.2s |
| Force maximale du bout du pouce | 15N |
| Force maximale du bout des quatre doigts | 15N |
| Force de préhension maximale à cinq doigts | 80N |
Capteur de pression
| Réseau piézorésistif | 6*12 |
| Zone de support de force du capteur | 9.6*14.4mm |
| Force de déclenchement | 5g |
| Plage de mesure | 20N |
| Durée de vie | 100 000 cycles |
| Taux de trame de communication | 200FPS |
Capteur capacitif (optionnel)
| Fréquence d'échantillonnage | >=50Hz |
| Plage de mesure | 0-30N |
| Limite de surcharge | 60N |
| Sensibilité à la pression | 0.1N |
| Résolution de mesure | 0.5%FS |
| Précision de mesure | 2%FS |
| Résolution de pression | 0.25N |
| Résolution de direction | 45° |
| Distance de détection | 1cm (Métal, Corps humain) |
Ce qui est inclus
- Câble de débogage USB vers CAN x1
- Câble de connexion XT30 (2+2) x1
- Adaptateur secteur x1
- Câble d'alimentation x1
- Linker Hand L10 x1
Applications
- Recherche et éducation sur la manipulation habile utilisant ROS1/ROS2 et des simulateurs (Pybullet, Isaac, MuJoCo).
- Téléopération via des gants, gants exosquelettes, gants de détection en métal liquide, vision et VR (Meta Quest 3).
- Assemblage de précision, opérations basées sur des chemins, serrage de vis, prise de feuilles minces et manipulation générale d'objets.
Manuels
Linker_Hand_L10_Product_Manual.pdf
Détails

Le Linker Hand L10 offre 10 DOF, un mouvement précis via un mécanisme de liaison et des pilotes de moteur personnalisés. Prend en charge UR, Franka, ROS, Python, VR, Pybullet, CAN, et plus pour une intégration et un contrôle robotiques polyvalents.
Le Linker Hand L10 offre une grande dextérité, chaque doigt offrant 4 degrés de liberté pour des opérations précises. Son système multi-capteurs—équipé de caméras et de peau électronique—fournit une conscience environnementale complète et une interaction adaptative. Grâce à l'intégration en cloud, les utilisateurs peuvent déployer rapidement la main via un service de bibliothèque de compétences sans code, permettant une personnalisation efficace tout en réduisant la complexité opérationnelle. Ensemble, ces capacités soutiennent une large gamme d'applications complexes, améliorant à la fois la précision et la facilité d'utilisation sans nécessiter de programmation ou de configuration étendues.

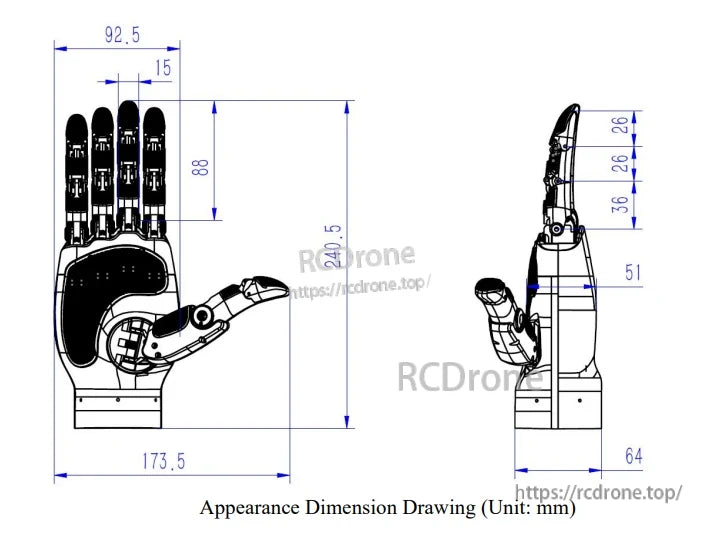
Dimensions de la main robotique en millimètres, montrant des vues de face et de côté avec des mesures précises pour la conception et l'assemblage.
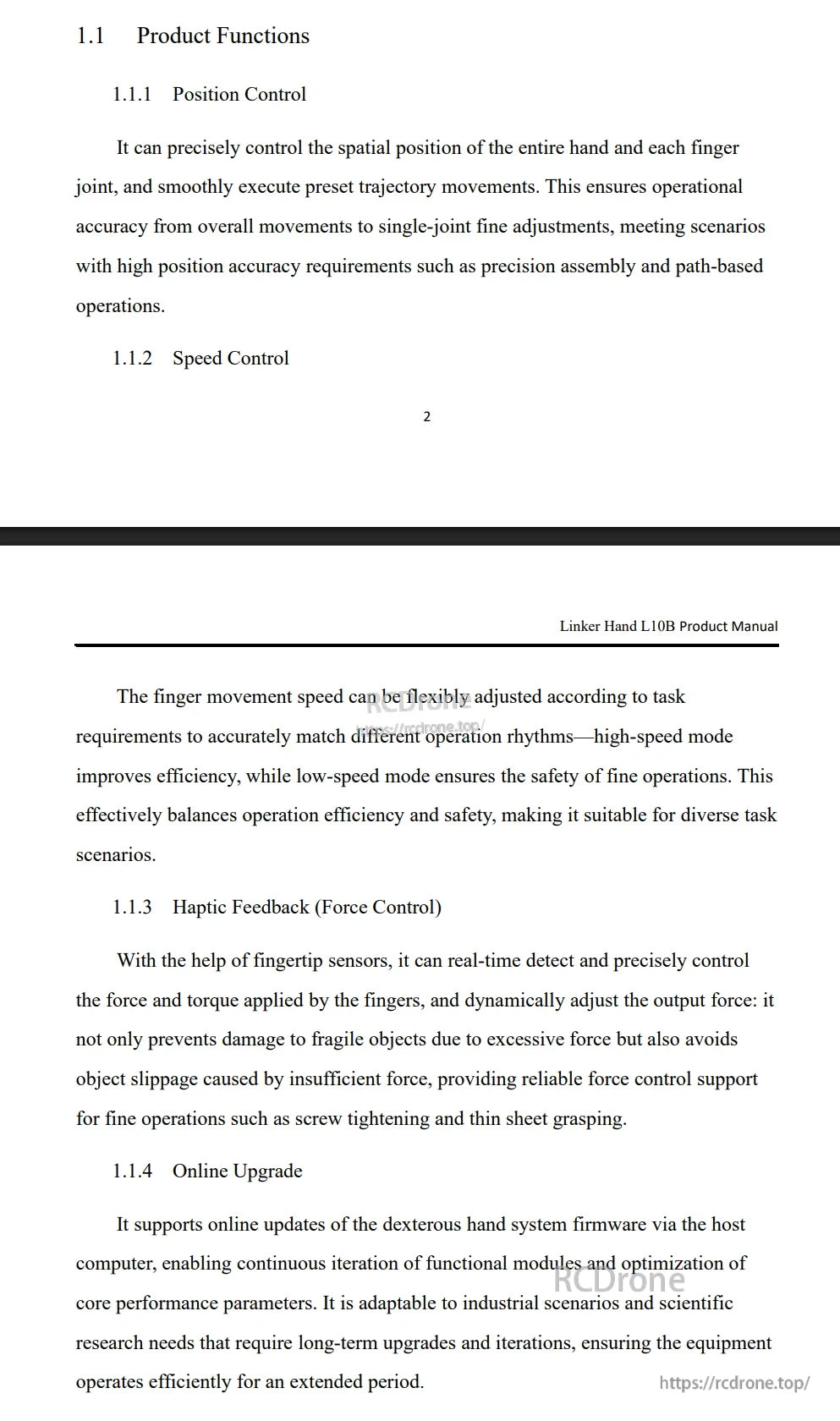
La main Linker L10B offre un contrôle précis de la position et de la vitesse, un retour haptique pour la gestion de la force, et des mises à jour de firmware en ligne. Conçue pour la précision, la sécurité et l'adaptabilité dans des applications industrielles et de recherche nécessitant une manipulation fine et des performances à long terme.
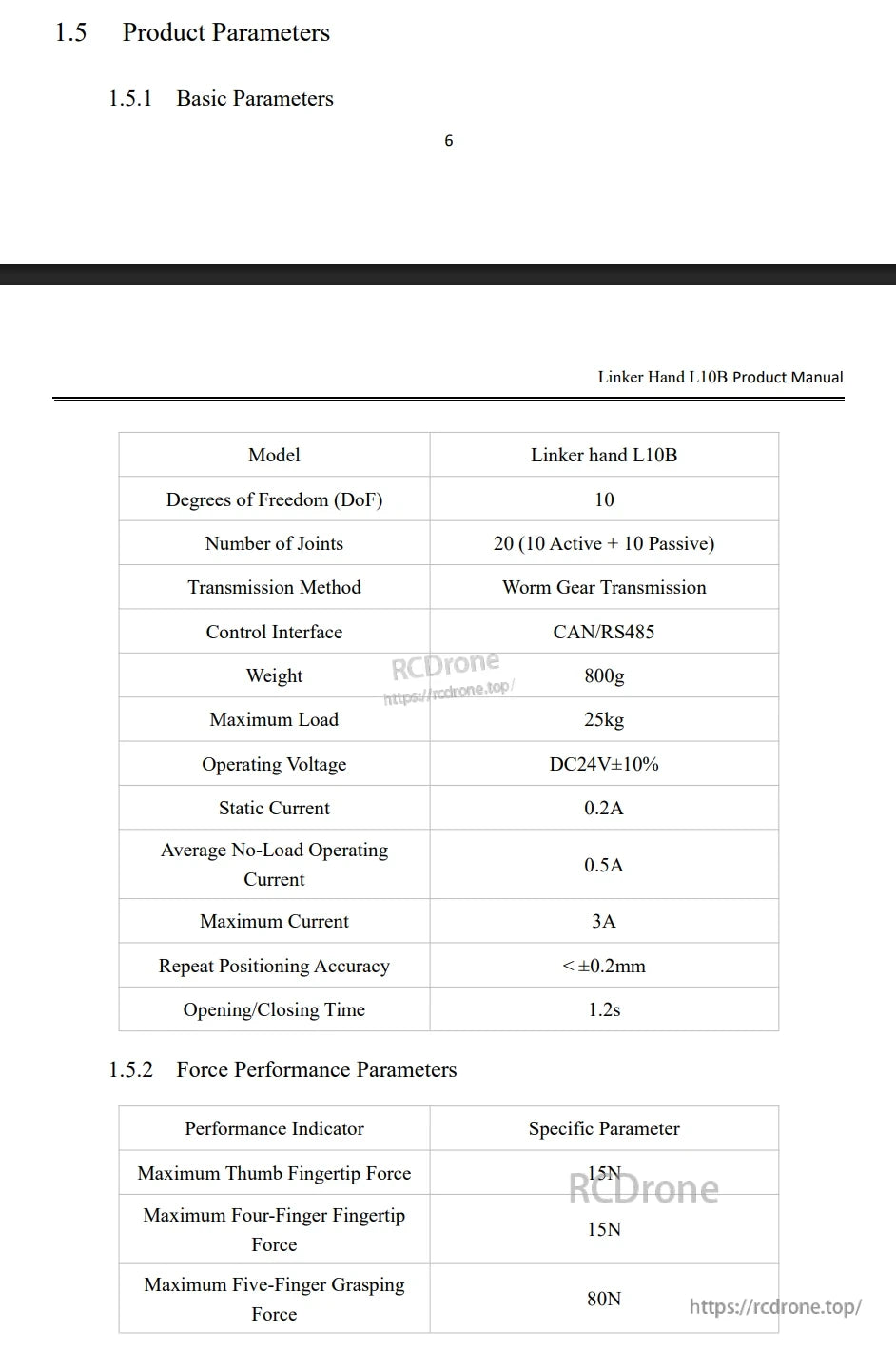
La main Linker L10B offre 10 DoF, 20 articulations, transmission par vis sans fin, et contrôle CAN/RS485. Pesant 800g, elle supporte jusqu'à 25kg à DC24V, offrant un positionnement précis et des forces de préhension allant jusqu'à 80N.

Dispose d'un réseau piézorésistif 6x12 (plage de 20N, 100k cycles). Capteur capacitif en option : échantillonnage ≥50Hz, plage de 0 à 30N, résolution directionnelle de 45°, détecte le métal ou le corps humain à 1cm.
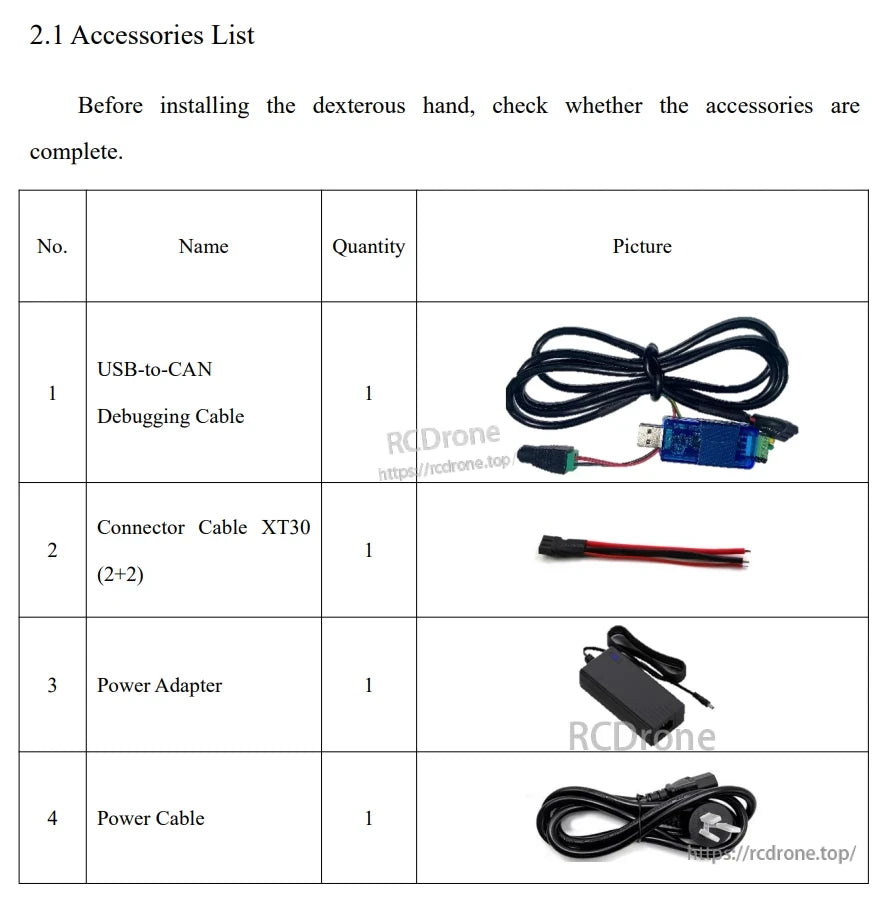
Liste des accessoires pour l'installation de la main habile : câble USB vers CAN, connecteur XT30, adaptateur secteur et câble d'alimentation, chacun en quantité un.
Related Collections













