







LINKERBOT Main L6 Main de Robot, 6 DoF, CAN, Transmission par liaison, Prise 50N, Répétabilité ±0,2mm
LINKERBOT Main L6 Main de Robot, 6 DoF, CAN, Transmission par liaison, Prise 50N, Répétabilité ±0,2mm
LINKERBOT
Impossible de charger la disponibilité du service de retrait
Aperçu
LINKERBOT La main robotique Linker Hand L6 est conçue pour une manipulation précise. Elle dispose de 6 degrés de liberté (DoF) et de 11 articulations (6 actives + 5 passives) avec une transmission par liaison et une interface de contrôle CAN. La structure montrée dans les images du produit met en évidence des doigts entièrement en métal, du silicone résistant à l'usure sur les bouts des doigts, des capteurs de pression tactile à cinq doigts, des voyants lumineux, un coussin en caoutchouc anti-pincement à demi-paume, et un entraînement direct par cylindre électrique de haute précision.
Caractéristiques clés
- Manipulation habile à 6 DoF ; 11 articulations (6 actives + 5 passives).
- Transmission par liaison avec contrôle par bus CAN.
- Précision de répétition de positionnement : ±0,2 mm.
- Capacité de force : force maximale de la pointe du pouce 10N ; force maximale de la pointe des quatre doigts 8N ; force maximale de préhension à cinq doigts 50N.
- Réseau de capteurs tactiles piézorésistifs à cinq doigts pour la mesure de contact/pression.
- Éléments de conception montrés : doigts en métal, pointes en silicone résistantes à l'usure, lumière indicatrice, coussin en caoutchouc anti-pincement.
- Disposition compacte & agile ; système multi-capteurs (y compris caméras et peau électronique) et intégration appareil-cloud comme illustré dans les images du produit.
Pour les ventes et le support technique, contactez [email protected] or visitez https://rcdrone.top/.
Spécifications
| Paramètre | Valeur |
|---|---|
| Degrés de Liberté (DoF) | 6 |
| Nombre de Joints | 11 (6 Actifs + 5 Passifs) |
| Mode de Transmission | Transmission par Liaison |
| Interface de Contrôle | CAN |
| Poids | 623,5g |
| Charge Maximale | 28kg |
| Tension de Fonctionnement | DC24V±10% |
| Courant Statique | 0,2A |
| Courant Moyen (Mouvement à Vide) | 0,75A |
| Courant Maximum | 1,4A |
| Précision de Positionnement Répétée | ±0.2mm |
| Force maximale de la pointe du pouce | 10N |
| Force maximale de la pointe des quatre doigts | 8N |
| Force de préhension maximale des cinq doigts | 50N |
Performance de mouvement
| Partie en mouvement | Plage d'angle (°) | Vitesse de mouvement (°/s) |
|---|---|---|
| Base du pouce | 57 | 152.82 |
| Base de l'index | 72.30 | 213.27 |
| Base du majeur | 72.90 | 208.29 |
| Base de l'annulaire | 73.10 | 202.49 |
| Base du petit doigt | 72.60 | 201.11 |
| Pointe du pouce | 69.90 | 192.84 |
| Point du doigt index | 64.60 | 192.84 |
| Point du doigt du milieu | 65.10 | 185.32 |
| Point du doigt annulaire | 66.90 | 185.32 |
| Point du petit doigt | 66.70 | 184.76 |
| Balancement latéral du pouce | 80 | 235.29 |
| Heures d'ouverture et de fermeture | - | 0.35s |
Capteurs
| Paramètre | Spécification |
|---|---|
| Réseau piézorésistif | 6*12 |
| Zone de force de capteur | 9.6*14.4mm |
| Force de déclenchement | 5g |
| Plage de mesure | 20N |
| Durée de vie | 100 000 cycles |
| Taux de communication | 200FPS |
| Plage de valeur | 0~4095 |
Dimensions d'apparence
| Définition | Paramètre (mm) |
|---|---|
| Longueur du bout du doigt moyen à la base de la paume | 190.7 |
| Largeur maximale de la paume | 121 |
| Longueur du bout du pouce à la base de la paume | 134.3 |
| Hauteur du poignet | 9. | 5
| Diamètre du poignet | 60 |
Ce qui est inclus
- Câble de débogage USB‑vers‑CAN x1
- Câble de connexion XT30 (2+2) x1
- Adaptateur secteur x1
- Câble d'alimentation x1
- Linker Hand L6 x1
Applications
- Préhension précise et manipulation d'objets
- Prise et manipulation d'outils
- Tâches de prise et de placement de composants
Manuels
Manuel du produit Linker Hand L6 (PDF)
Détails


Main robotique agile et performante avec 6 degrés de liberté. Caractéristiques : agilité compacte, système multi-capteurs et intégration appareil-cloud pour un contrôle précis, une adaptation à l'environnement et une personnalisation sans code via la bibliothèque de compétences cloud.



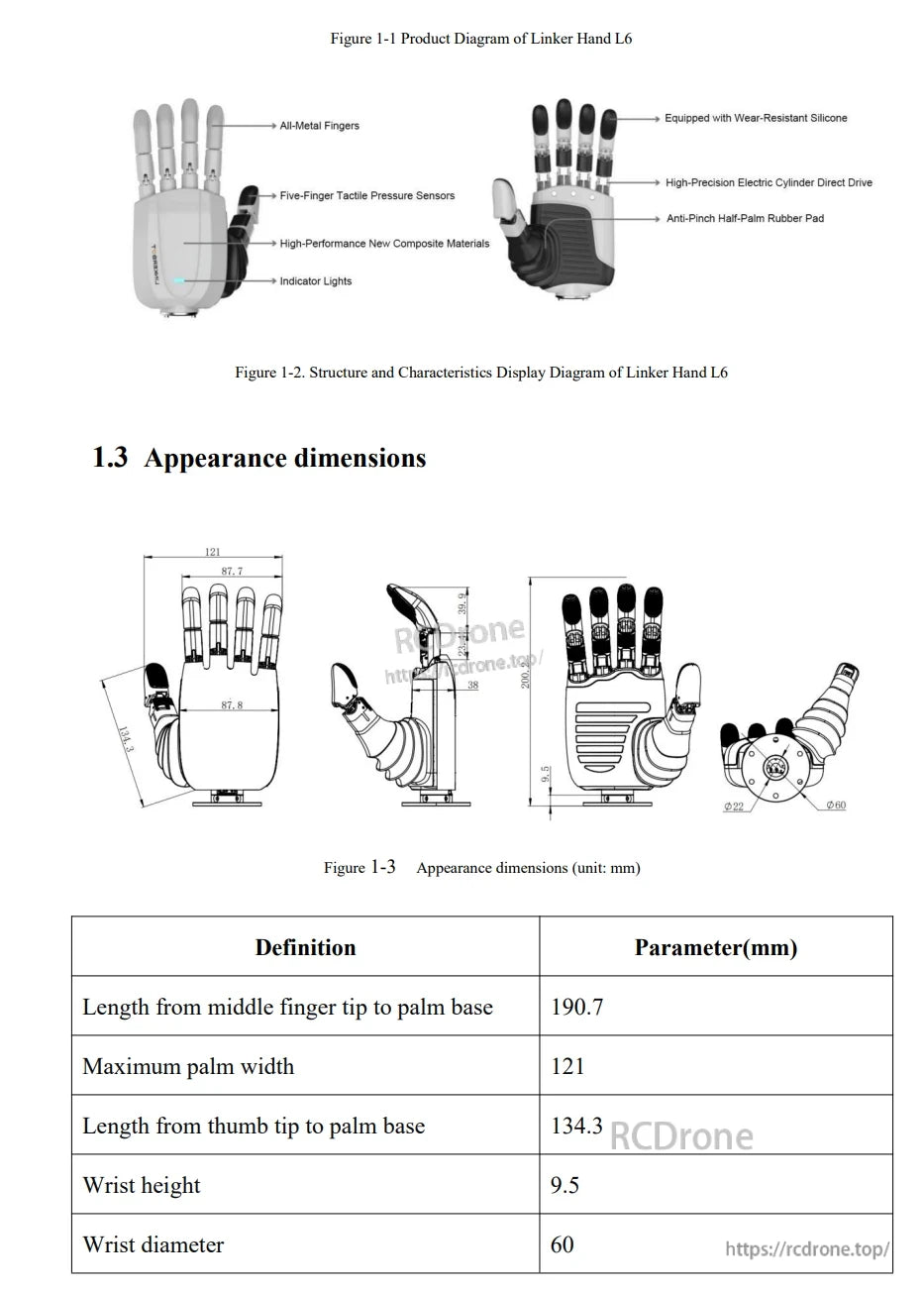
La main Linker L6 possède des doigts entièrement en métal, des capteurs tactiles, un silicone résistant à l'usure, un entraînement par cylindre électrique et un coussinet en caoutchouc anti-pincement. Longueur des doigts : 190,7 mm ; largeur de la paume : 121 mm ; diamètre du poignet : 60 mm.
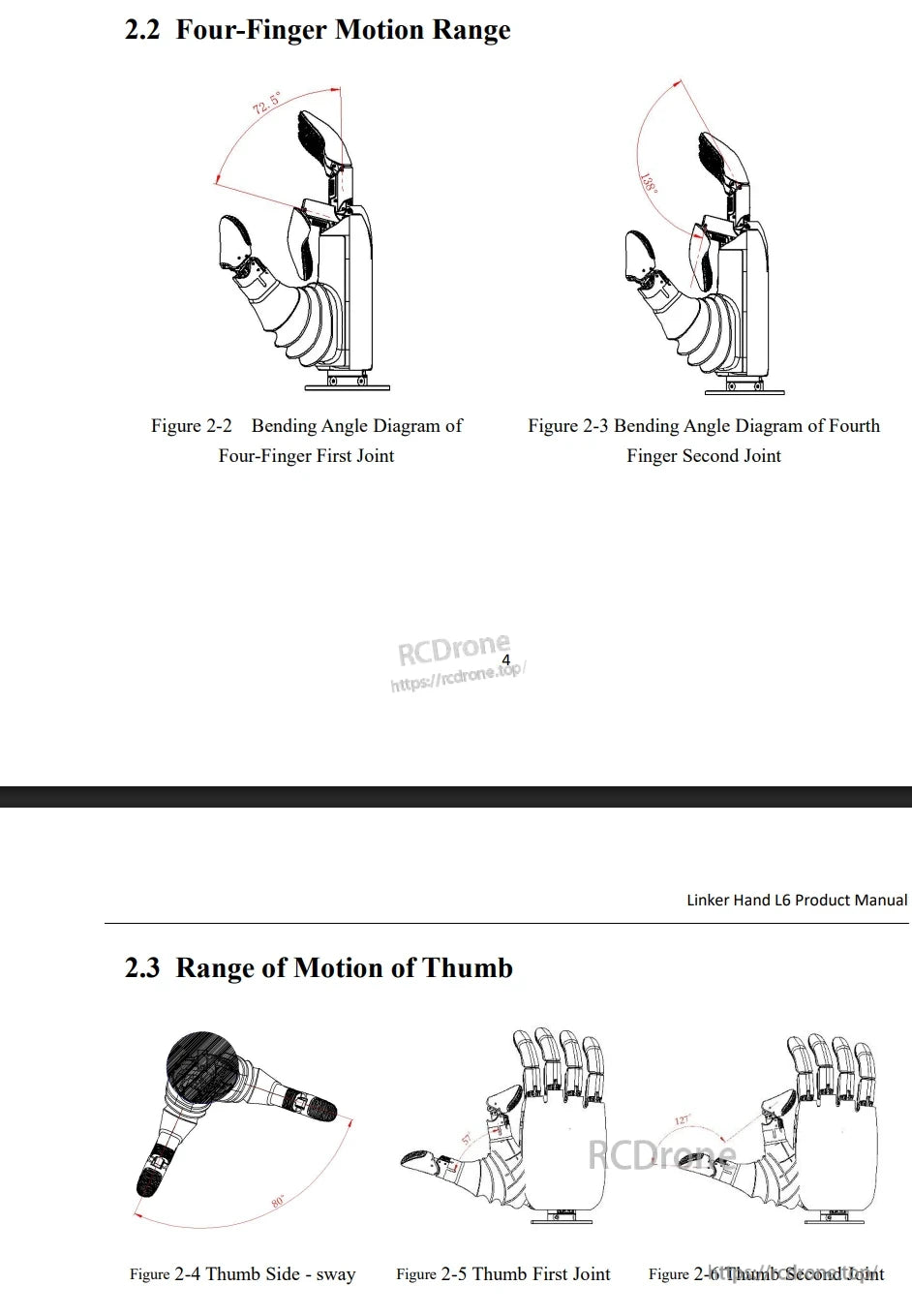
Plages de mouvement des articulations des doigts et du pouce : première articulation des quatre doigts 72,5°, deuxième articulation 138° ; mouvement latéral du pouce 80°, première articulation 57°, deuxième articulation 127°.
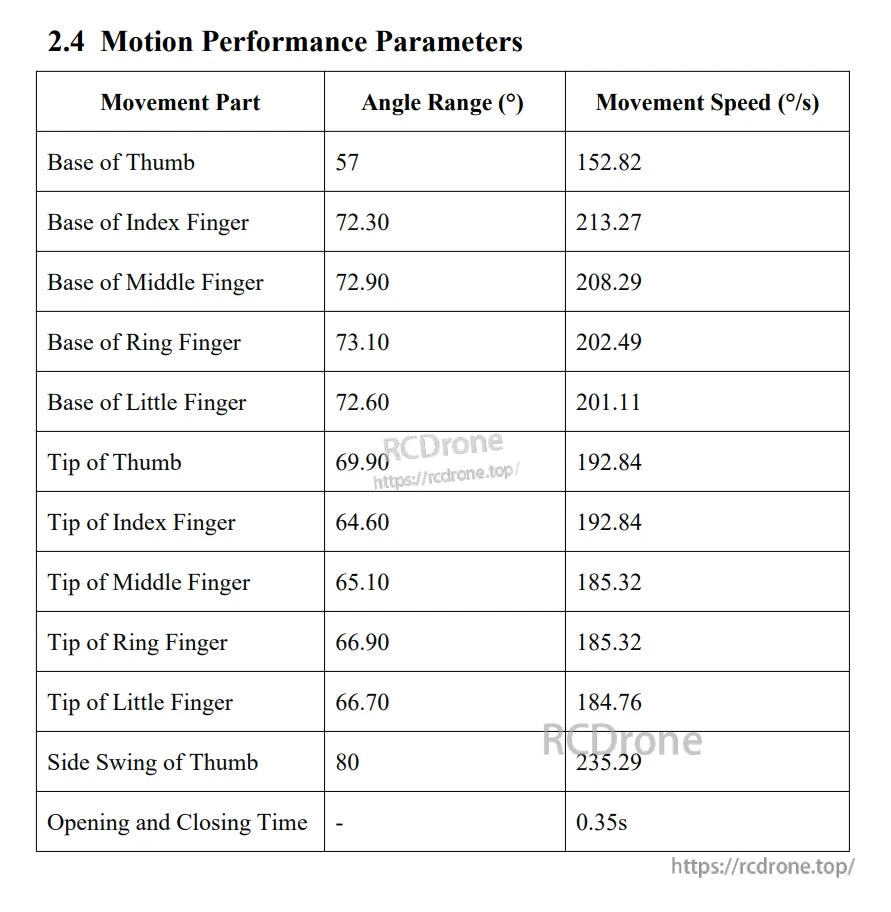
Paramètres de mouvement des doigts de la main robotique : balancement du pouce à 235,29°/s, ouverture/fermeture en 0,35 secondes—démontrant une articulation précise avec des plages d'angles d'articulation et des vitesses détaillées.
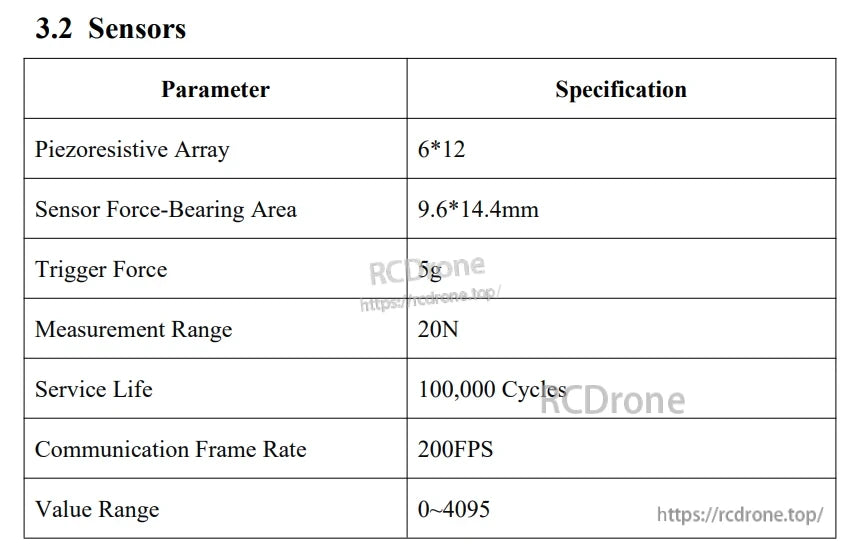
Spécifications des capteurs : matrice 6x12, zone de 9,6x14,4 mm, déclenchement à 5g, plage de 20N, 100k cycles, 200FPS, plage de valeurs de 0 à 4095.
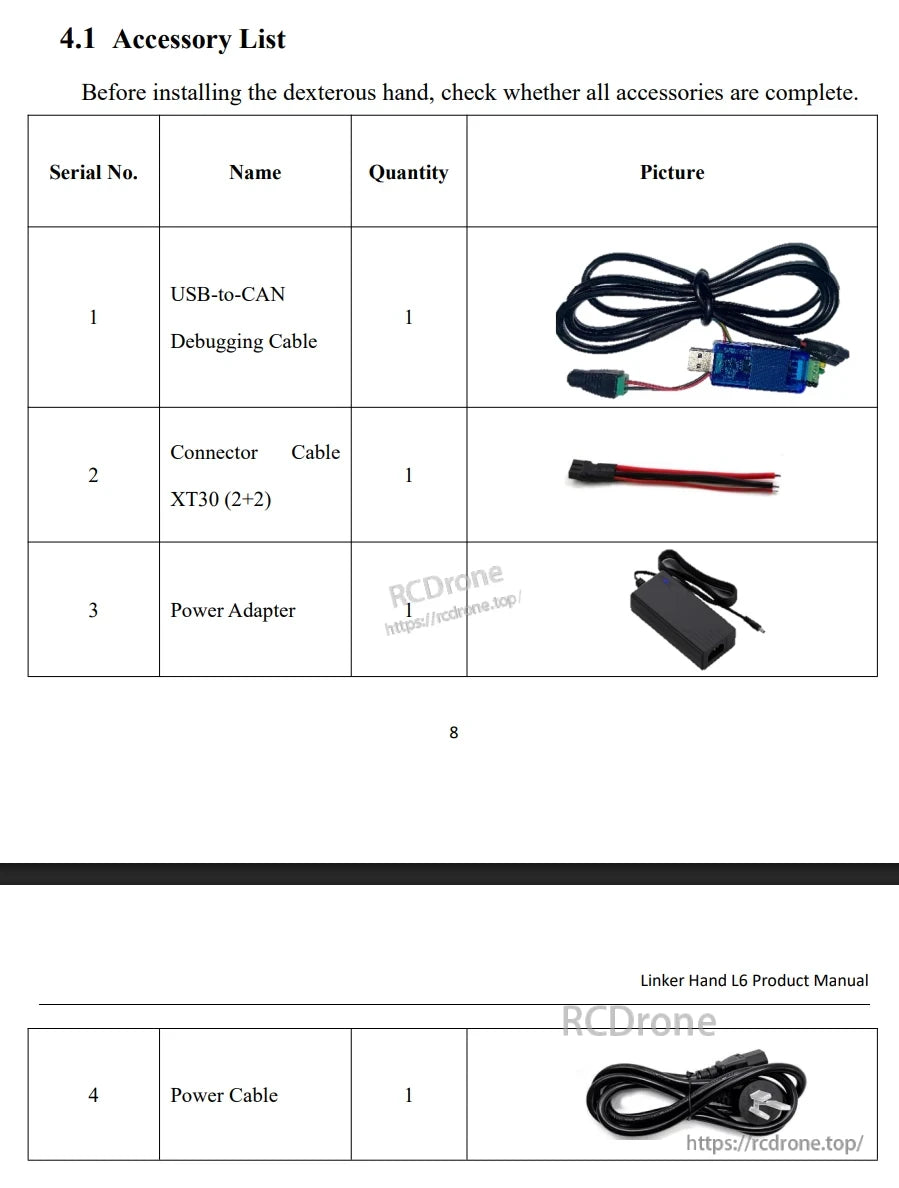
Liste des accessoires pour la main Linker L6 : câble USB vers CAN, connecteur XT30, adaptateur secteur et câble d'alimentation. Vérifiez la complétude avant l'installation.
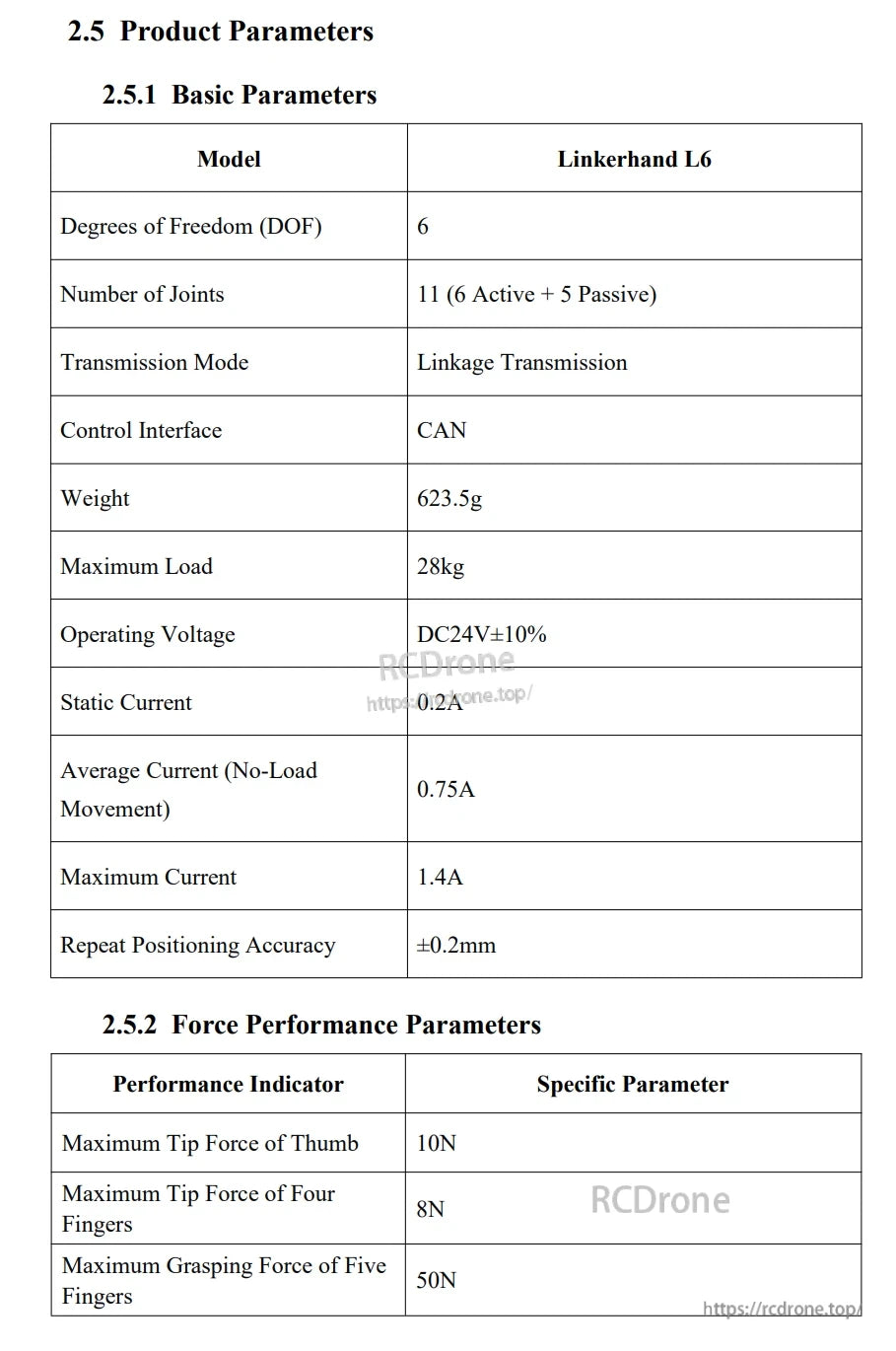
La main robotique Linkerhand L6 a 6 DOF, 11 articulations, contrôle CAN, pèse 623,5 g, supporte une charge maximale de 28 kg, fonctionne sous DC24V±10%, offre une précision de ±0,2 mm et délivre jusqu'à 50N de force de préhension.
Related Collections







