







LINKERBOT Main Linker O6, main robot à 6 DoF, 11 articulations, CAN/RS485, force de préhension 130N, précision ±0,2mm, DC24V±10%
LINKERBOT Main Linker O6, main robot à 6 DoF, 11 articulations, CAN/RS485, force de préhension 130N, précision ±0,2mm, DC24V±10%
LINKERBOT
Impossible de charger la disponibilité du service de retrait
Aperçu
LINKERBOT Linker Hand O6 est une main robotique conçue pour une intégration compacte et une manipulation précise. Elle offre 6 DoF avec 11 articulations (6 actives + 5 passives), une transmission par vis sans fin pour une action stable, un contrôle CAN/RS485, et une détection tactile en option. La structure habile fournit jusqu'à 130N de force de préhension à cinq doigts avec une précision de positionnement répétée de ±0,2 mm à une tension de fonctionnement de DC24V±10%. Sa construction légère de 370g et son petit encombrement soutiennent la manutention logistique, l'assemblage industriel et les scénarios de préhension de formes irrégulières.
Caractéristiques clés
Compact &et Agile
La conception structurelle compacte réduit la charge de l'équipement tout en améliorant la flexibilité pour une préhension précise dans des espaces restreints.
Haute Durabilité
Fabriqué en alliage d'aluminium pour une résistance légère et à l'usure, soutenant une performance stable à long terme.
Intégration Appareil-Cloud
L'intégration appareil-cloud permet un déploiement rapide via une bibliothèque de compétences basée sur le cloud avec une opération et une personnalisation simplifiées.
Spécifications
| Modèle | LINKERBOT Main Linker O6 |
| Degrés de Liberté (DoF) | 6 |
| Nombre de Joints | 11 (6 Actifs + 5 Passifs) |
| Mode de Transmission | Transmission par Vis sans Fin |
| Interface de Contrôle | CAN/RS485 |
| Poids | 370g |
| Charge Maximale | 30kg |
| Tension de Fonctionnement | DC24V±10% |
| Précision de Positionnement Répétée | ±0.2mm |
| Capteur Tactile | Optionnel |
| Force Maximale du Bout du Pouce | 28N |
| Force Maximale des Quatre Boutons des Doigts | 33N |
| Force de Préhension Maximale des Cinq Doigts | 130N |
| Dimensions (Apparence) | Hauteur 177mm; Largeur 76.5mm; Épaisseur 40mm |
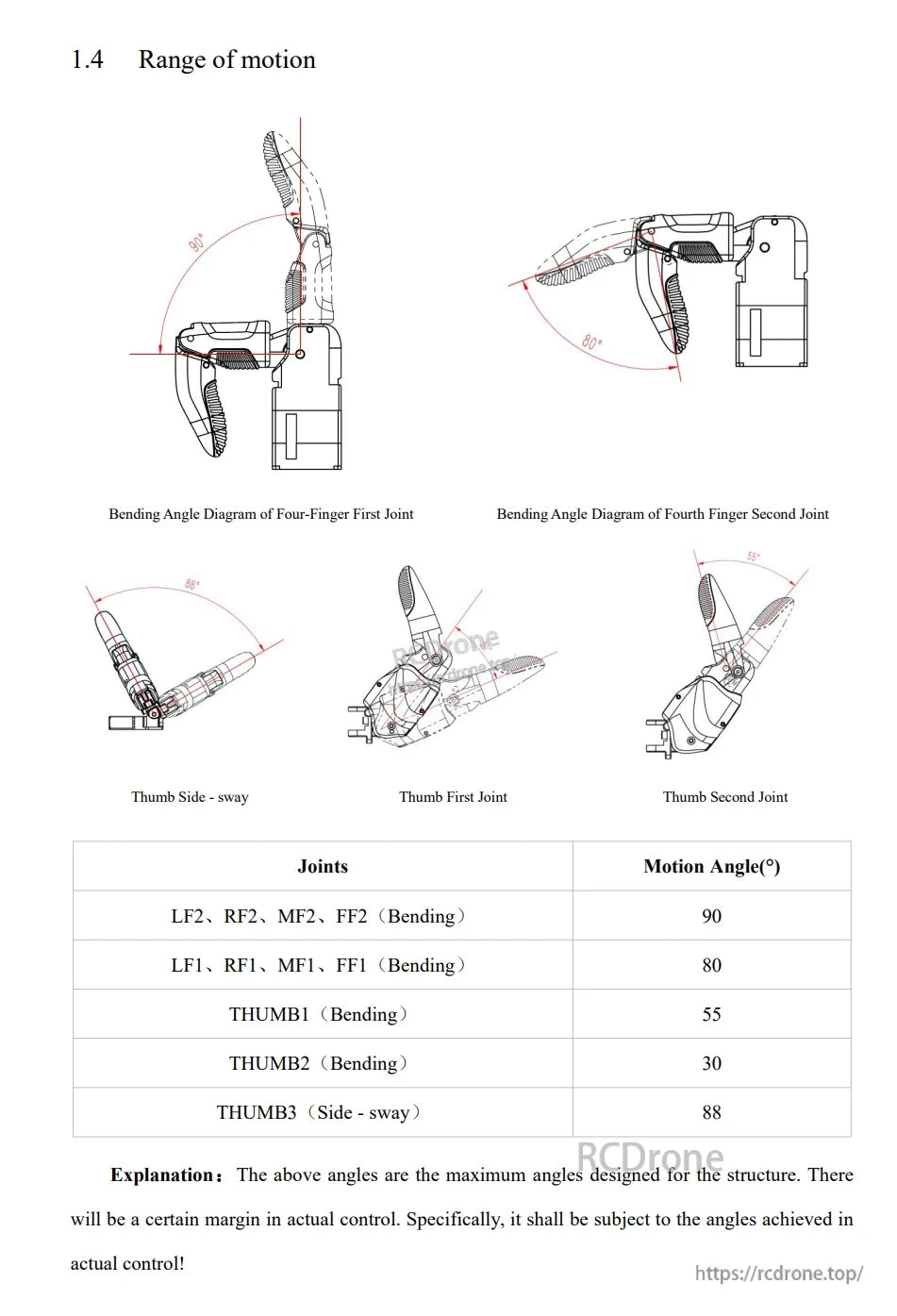
Amplitude de mouvement
| LF2, RF2, MF2, FF2 (Flexion) | 90° |
| LF1, RF1, MF1, FF1 (Flexion) | 80° |
| POIGNET1 (Flexion) | 55° |
| POIGNET2 (Flexion) | 30° |
| POIGNET3 (Latéral - balancement) | 88° |
Ce qui est inclus
- Câble de débogage USB-à-CAN ×1
- Câble de connecteur XT30 (2+2) ×1
- Adaptateur secteur ×1
- Câble d'alimentation ×1
- Linker Hand O6 x1
Pour les ventes ou le support technique, contactez [email protected] or visitez https://rcdrone.top/.
Applications
- Gestion logistique et transfert de matériel
- Assemblage industriel et manipulation d'outils
- Préhension stable de formes irrégulières et d'articles de consommation
Manuels
Linker_Hand_O6_Product_Manual.pdf
Détails

Le Linker Hand O6 offre 6 articulations actives et 5 articulations passives pour une prise précise et forte. Son design en aluminium compact et durable convient à la logistique, à l'assemblage et à la préhension d'objets irréguliers. Il dispose d'une intégration cloud pour un entraînement AI facile sans codage.


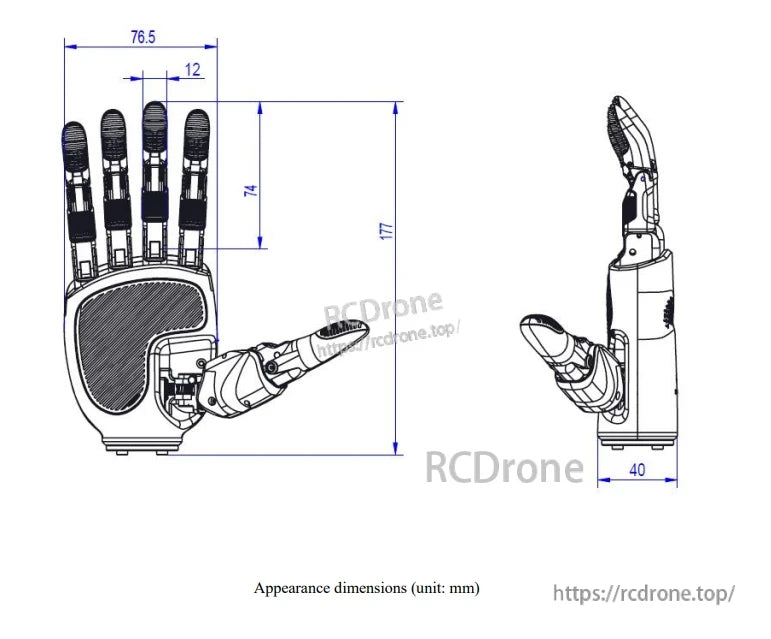
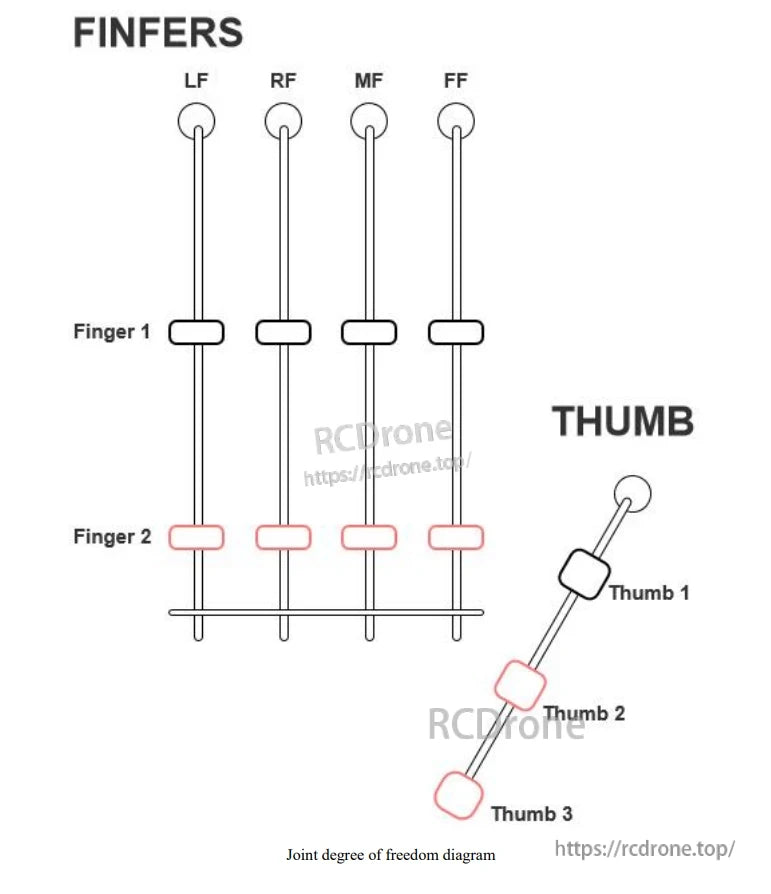
Diagramme des degrés de liberté des articulations des doigts et du pouce
Les doigts se plient de 80 à 90°, le pouce se plie de 30 à 55°, et le mouvement latéral atteint 88°. Ce sont les angles maximums conçus ; le contrôle réel peut varier légèrement.
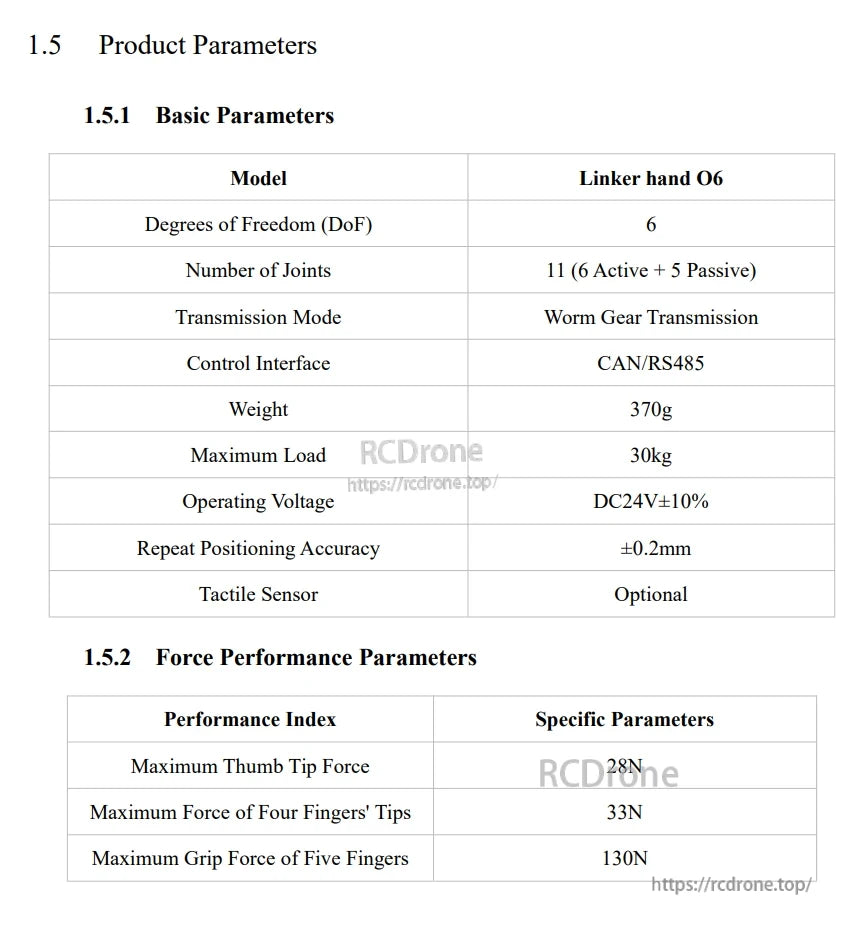
La main robotique Linker Hand O6 a 6 DoF, 11 articulations, transmission par vis sans fin, contrôle CAN/RS485, pèse 370g, supporte une charge maximale de 30kg, fonctionne à DC24V±10%, avec une précision de ±0.2mm, et propose des capteurs tactiles optionnels avec des performances de force spécifiées.

Liste des accessoires pour l'installation de la main dextrale : câble USB vers CAN, connecteur XT30, adaptateur secteur et câble d'alimentation—toutes les quantités sont une.
Related Collections







