



Moteur LKMTECH MF4005-V2 12V RS485/CAN Encodeur Magnétique 18 bits Option de Contrôle DF40V2 pour Robotique
Moteur LKMTECH MF4005-V2 12V RS485/CAN Encodeur Magnétique 18 bits Option de Contrôle DF40V2 pour Robotique
LKMTECH
Impossible de charger la disponibilité du service de retrait
Présentation
LKMTECH MF4005-V2 est un moteur conçu pour des applications mécatroniques intégrées nécessitant un design léger, une grande précision de contrôle et un couple élevé. La mise à jour MF4005 V2 met en avant : la résolution de l'encodeur améliorée de 14 bits à 18 bits, l'optimisation du couple de cogging, le support d'entrée PWM, et la communication CAN/RS485 avec plusieurs options de débit en bauds.
Caractéristiques clés
- Conception intégrée : intégration mécanique-électrique
- Conception légère : conception aplatie en alliages d'aluminium aérospatial
- Haute précision de contrôle : encodeur magnétique (la mise à jour MF4005 V2 indique 14 bits mis à niveau vers 18 bits)
- Sortie de couple élevée : aimant permanent RbFeB haute performance
- Prend en charge l'entrée PWM
- Communication : CAN ou RS485
- Fonctions de conduite : peut basculer entre le mode couple, le mode vitesse et le mode position
- Contrôle principal : processeur ARM Cortex-M4 32 bits à haute efficacité (conduite)
- Surveillance en temps réel de la température du stator (conduite)
- Étape de puissance de conduite : circuit en pont complet avec faible résistance interne et courant élevé
- Encodeur magnétique absolu à tour unique 18 bits (texte de fonctionnalité de conduite) ; une calibration, position zéro jamais perdue
- Notes de construction du moteur : rotor externe ; conception à arc multi-étapes avec aimant permanent ; espace d'air plus petit ; magnétisation radiale ; 0.2 mm feuille d'acier au silicium ; fil émaillé isolé classe H ; fil NdFeB de grade SH
- service OEM/ODM (pas une spécification de produit)
- Logiciel de paramètres : logiciel de programme fourni pour ajuster les paramètres, tester et mettre à niveau ; prend en charge le développement open source tel que PC, MCU, PLC, ICP et RPi
Scénarios d'application
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Caméra PTZ
- Lidar laser
- Robot d'inspection de station électrique
- Inspection industrielle
Spécifications
Modèle de moteur : MF4005-V2
| Paramètre | Valeur (25 tours) | Valeur (40 tours) |
|---|---|---|
| Nom de l'article | MF4005-V2 | MF4005-V2 |
| Tours | 25 | 40 |
| Tension nominale | 12V | 12V |
| Vitesse max | 2390RPM | 1300RPM |
| Couple nominal | 0.07 N.m | 0.06 N.m |
| Vitesse nominale | 1600RPM | 700RPM |
| Courant nominal | 1.44A | 0.81A |
| Puissance maximale | 14W | 4.6W |
| Couple maximal | 0.25 N.m | 0.12 N.m |
| Constante de vitesse | 133 rpm/V | 58 rpm/V |
| Constante de couple | 0.05 N.m/A | 0.07 N.m/A |
| Type de bobinage | Y | Y |
| Résistance de phase | 1.9Ω | 4.3Ω |
| Inductance de phase | 0.5mH | 1.2mH |
| Poles du moteur | 26 | 26 |
| Inertie du rotor | 56 gcm² | 56 gcm² |
| Température du moteur | OUI | OUI |
| Charge nominale du roulement | 140N | 140N |
| Poids du moteur | 65g | 65g |
| Recommandation de l'entraînement | DF40V2 | DF40V2 |
| Tension d'entrée de l'entraînement | 7.4-32V | 7.4-32V |
| Communication | RS485 OU CAN | RS485 OU CAN |
| Fréquence de communication | RS485 : 500Hz (115200bps) / CAN : 2KHz (1Mbps) | RS485 : 500Hz (115200bps) / CAN : 2KHz (1Mbps) |
| Encodeur | Encodeur magnétique 18 bits | Encodeur magnétique 18 bits |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (24KHz) / Boucle de vitesse (8KHz) / Boucle de position (8KHz) | Boucle de couple (24KHz) / Boucle de vitesse (8KHz) / Boucle de position (8KHz) |
| Courbe d'accélération | Accélération trapézoïdale | Accélération trapézoïdale |
Définition de l'interface
Interrupteur ID : INTERUPTEUR ID
| Interface | Remarque |
|---|---|
| A/L | RS485-A ou CAN-L |
| B/H | RS485-B ou CAN-H |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| V- | Alimentation négative |
| V- | Alimentation négative |
| T | Émetteur UART |
| R | Récepteur UART |
| G | Signal GND |
Pour un support avant-vente ou d'intégration (configuration RS485/CAN, sélection de la vitesse en bauds et fichiers CAO), contactez [email protected] or visitez https://rcdrone.top/.
Manuels / Fichiers
Détails

Le MF4005‑V2 intègre des fonctionnalités de moteur, d'encodeur et de commande pour des constructions robotiques compactes, avec un encodeur magnétique de 18 bits amélioré et des options de communication CAN/RS485.
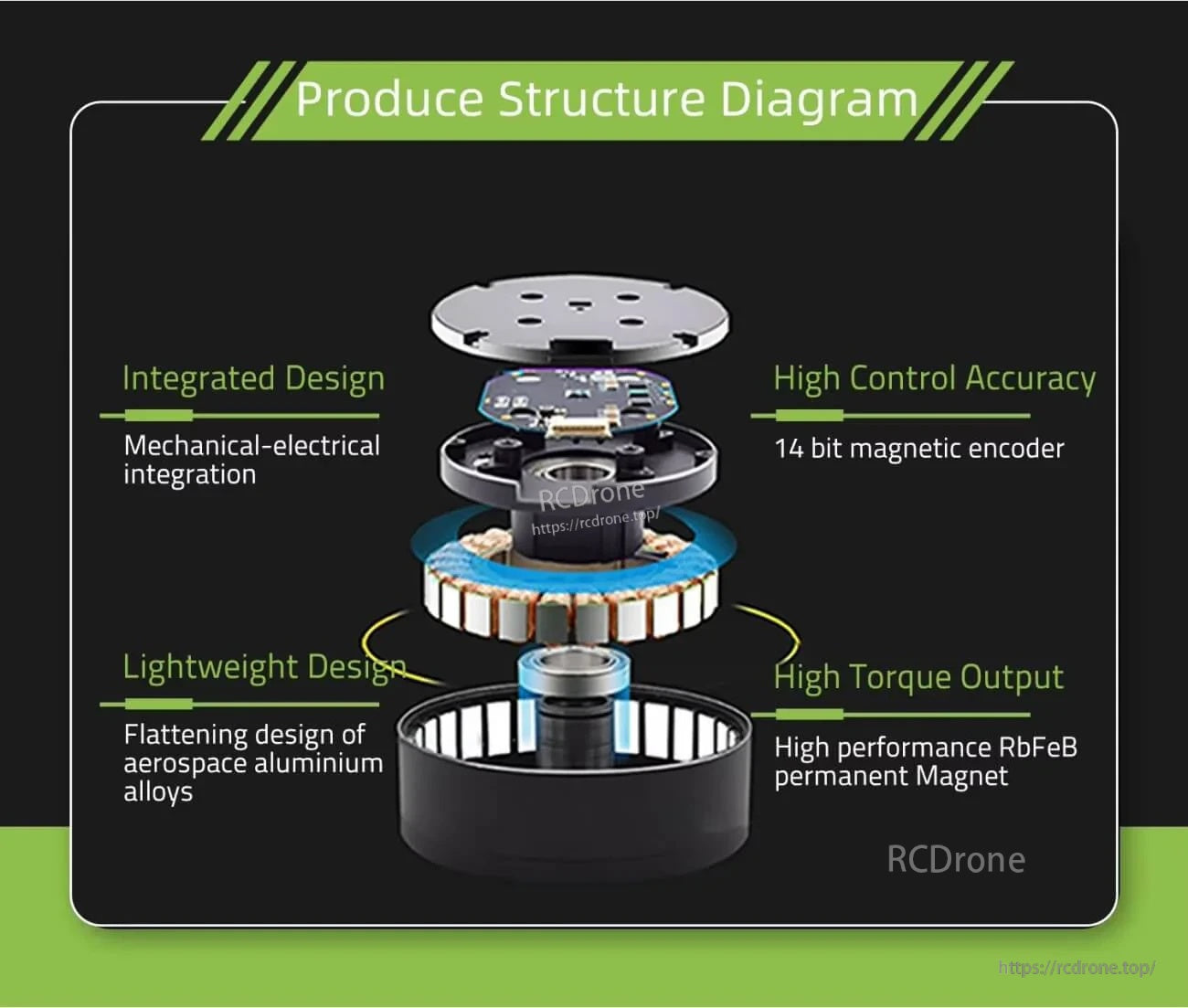
Une construction intégrée et légère combine l'électronique de commande avec l'assemblage du moteur pour soutenir un contrôle précis et un couple élevé.
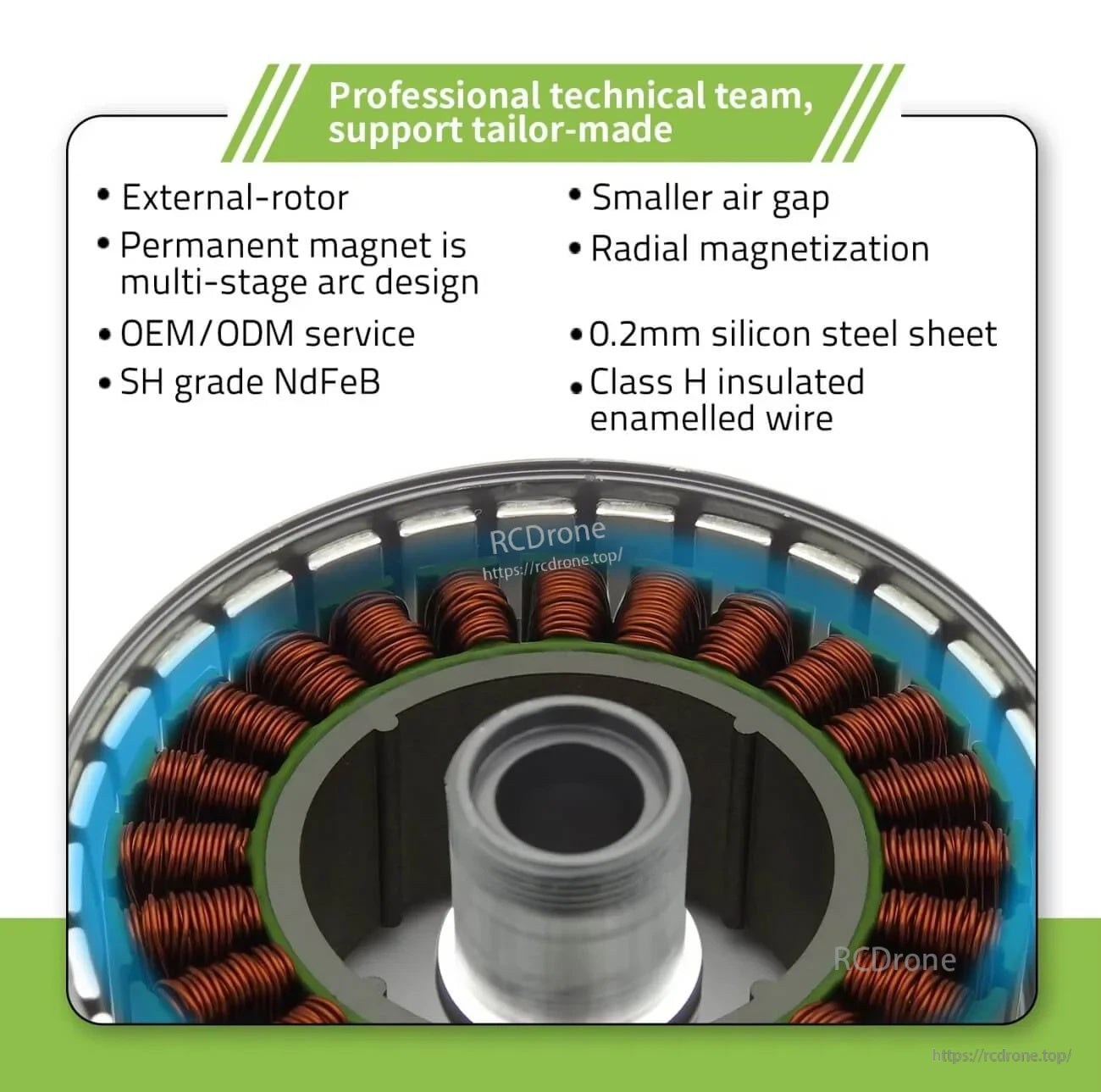
Le design à rotor externe et la disposition dense des enroulements aident à équilibrer la taille, la réactivité et le couple pour les articulations et actionneurs robotiques.
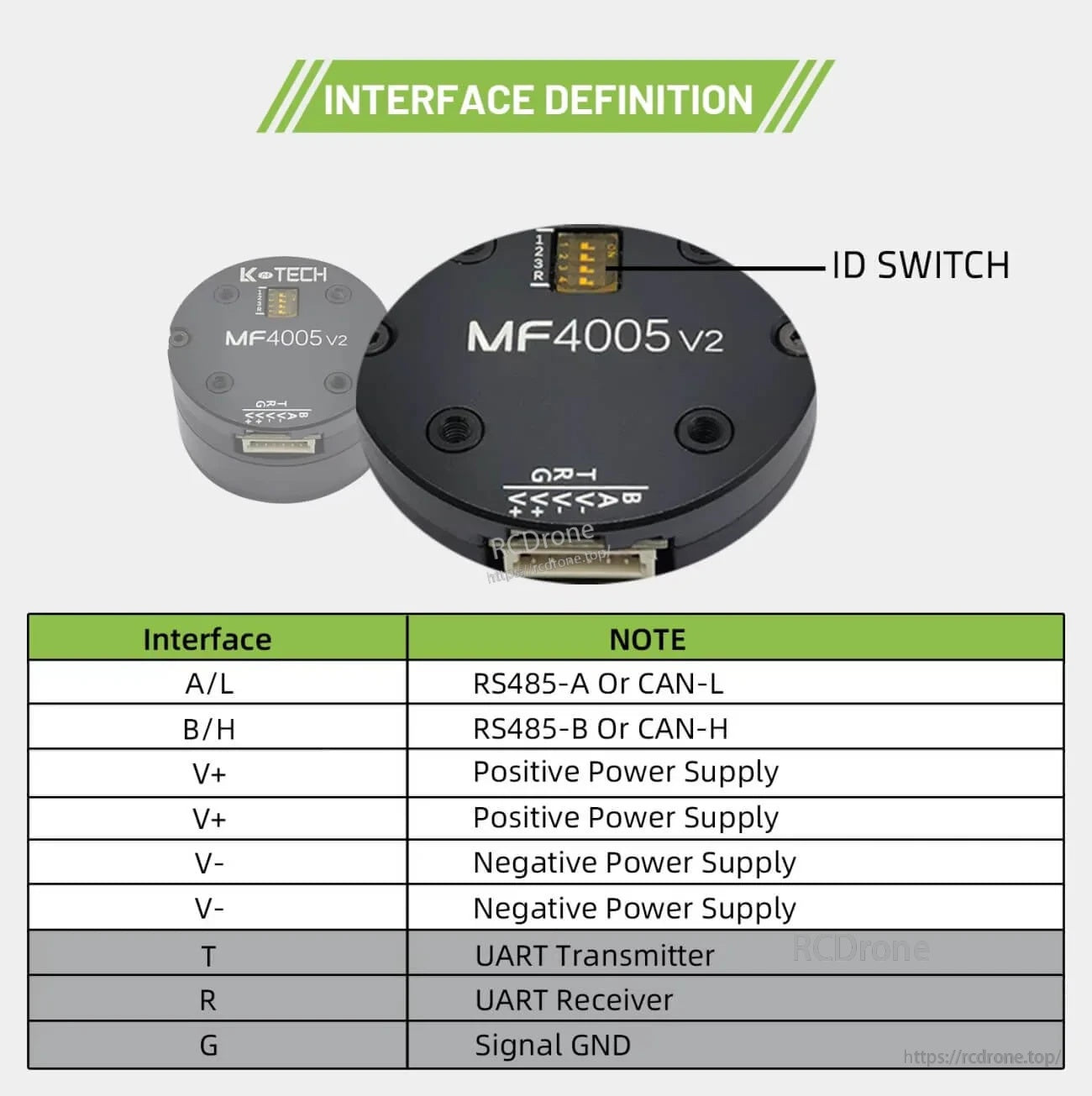
Le câblage est simplifié avec un connecteur clairement étiqueté et un interrupteur d'identification pour les configurations de bus utilisant RS485 ou CAN.
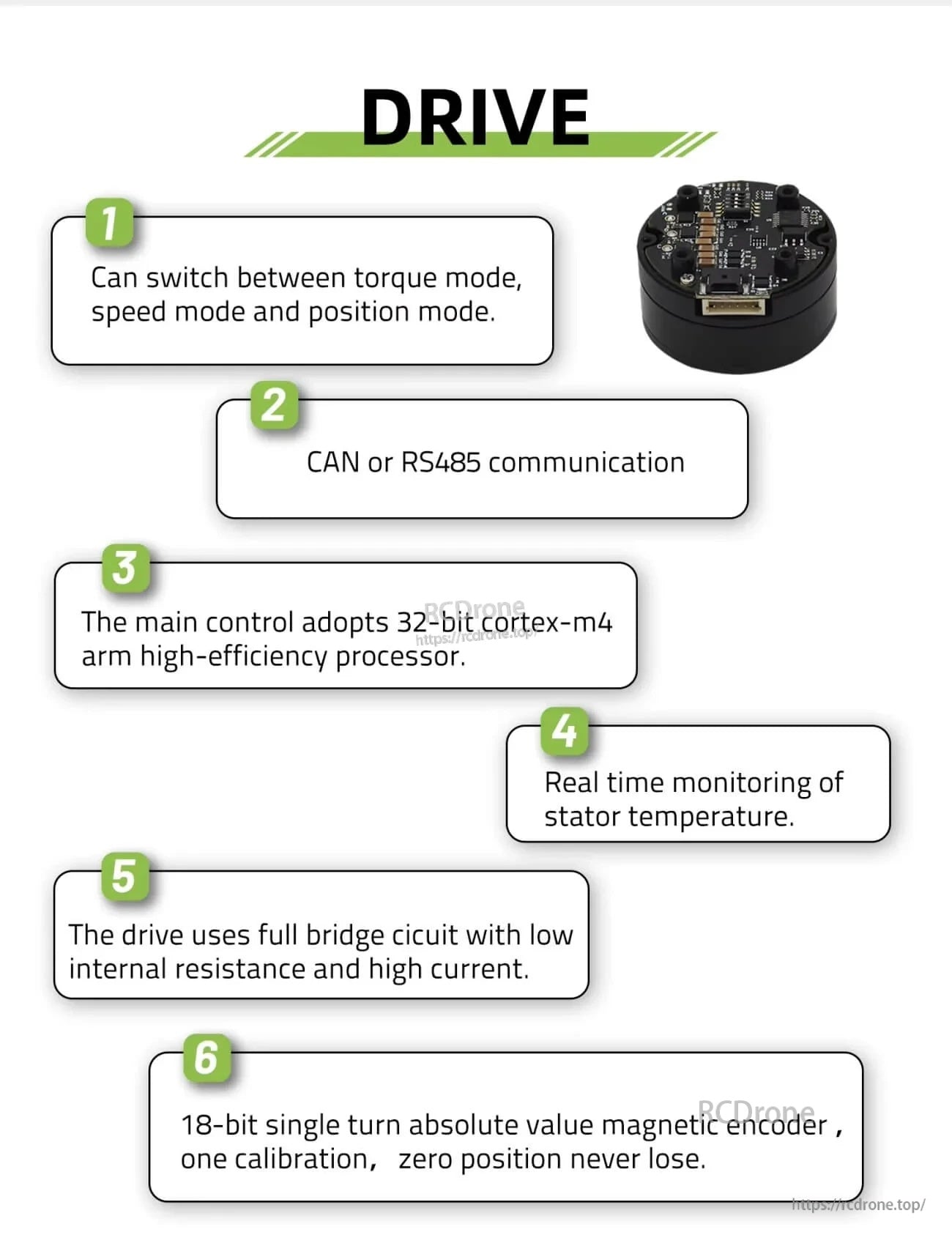
Les capacités de conduite incluent des modes de couple, de vitesse et de position sélectionnables, ainsi que la surveillance en temps réel de la température du stator via CAN ou RS485.
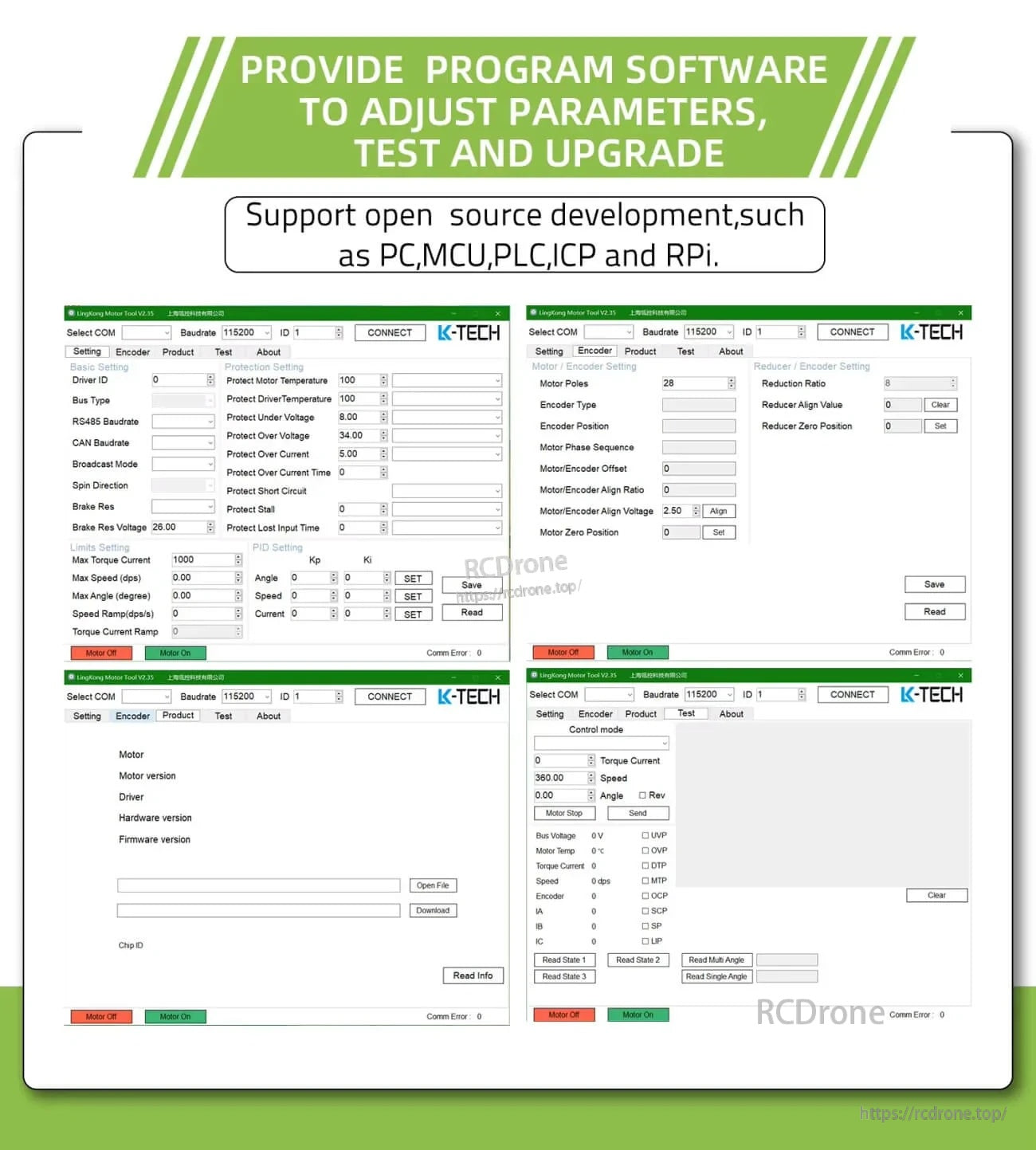
Le support logiciel PC aide à l'ajustement des paramètres, aux tests et aux mises à jour, avec des options adaptées aux flux de travail de développement.
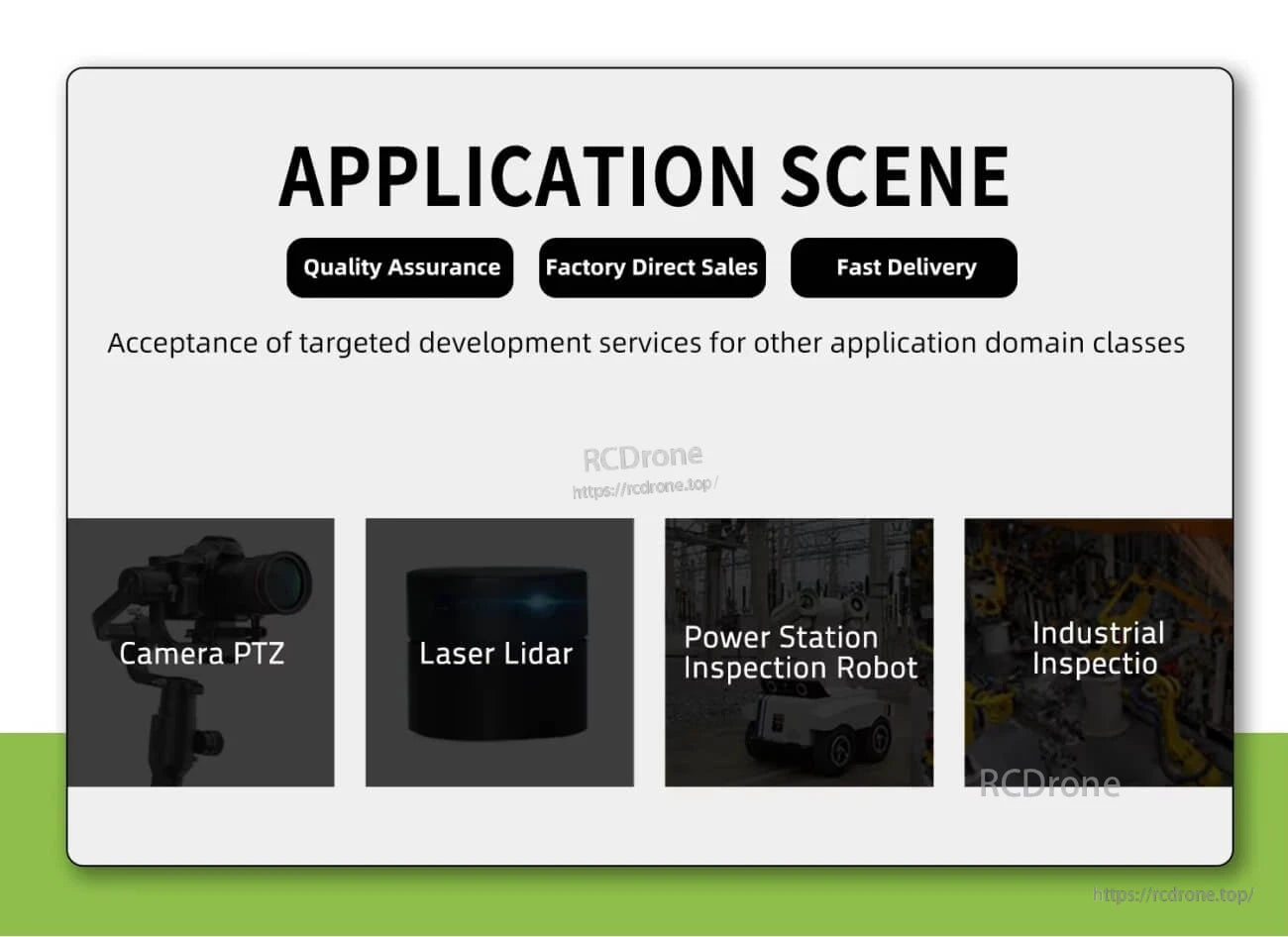
Les domaines d'application courants incluent les têtes de caméra PTZ, les systèmes lidar et les robots d'inspection utilisés dans des environnements industriels.
Related Collections



