



Moteur LKMTECH MF6010-V2 24V MF6010v2 15/25 Tours Encodeur 18 bits RS485/CAN pour Actionneurs Robotiques
Moteur LKMTECH MF6010-V2 24V MF6010v2 15/25 Tours Encodeur 18 bits RS485/CAN pour Actionneurs Robotiques
LKMTECH
Impossible de charger la disponibilité du service de retrait
Présentation
LKMTECH Le moteur MF6010-V2 (MF6010v2) est un moteur à conception intégrée pour la robotique et les actionneurs d'automatisation, offrant une construction légère, une grande précision de contrôle et un couple élevé. La mise à jour du produit MF v2 comprend une mise à niveau de la résolution de l'encodeur de 14 bits à 18 bits, une optimisation du couple de cogging, un support d'entrée PWM et une communication CAN/RS485 avec plusieurs débits en bauds.
Caractéristiques clés
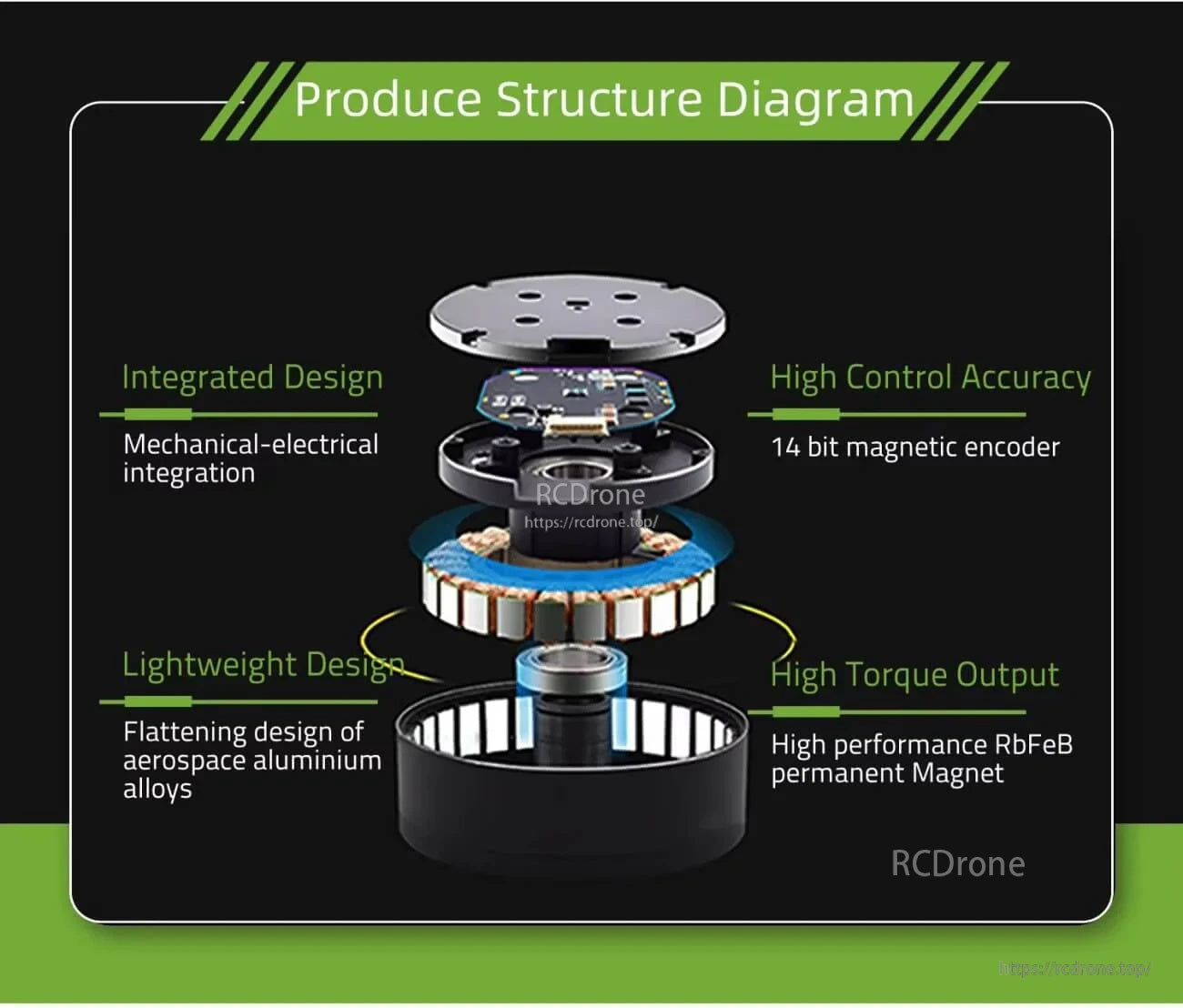
- Conception intégrée : intégration mécanique-électrique
- Conception légère : conception aplatie en alliages d'aluminium aérospatial
- Sortie de couple élevée : aimant permanent RbFeB haute performance
- Haute précision de contrôle : encodeur magnétique 14 bits (notes de mise à jour MF v2 résolution de l'encodeur mise à niveau de 14 bits à 18 bits)
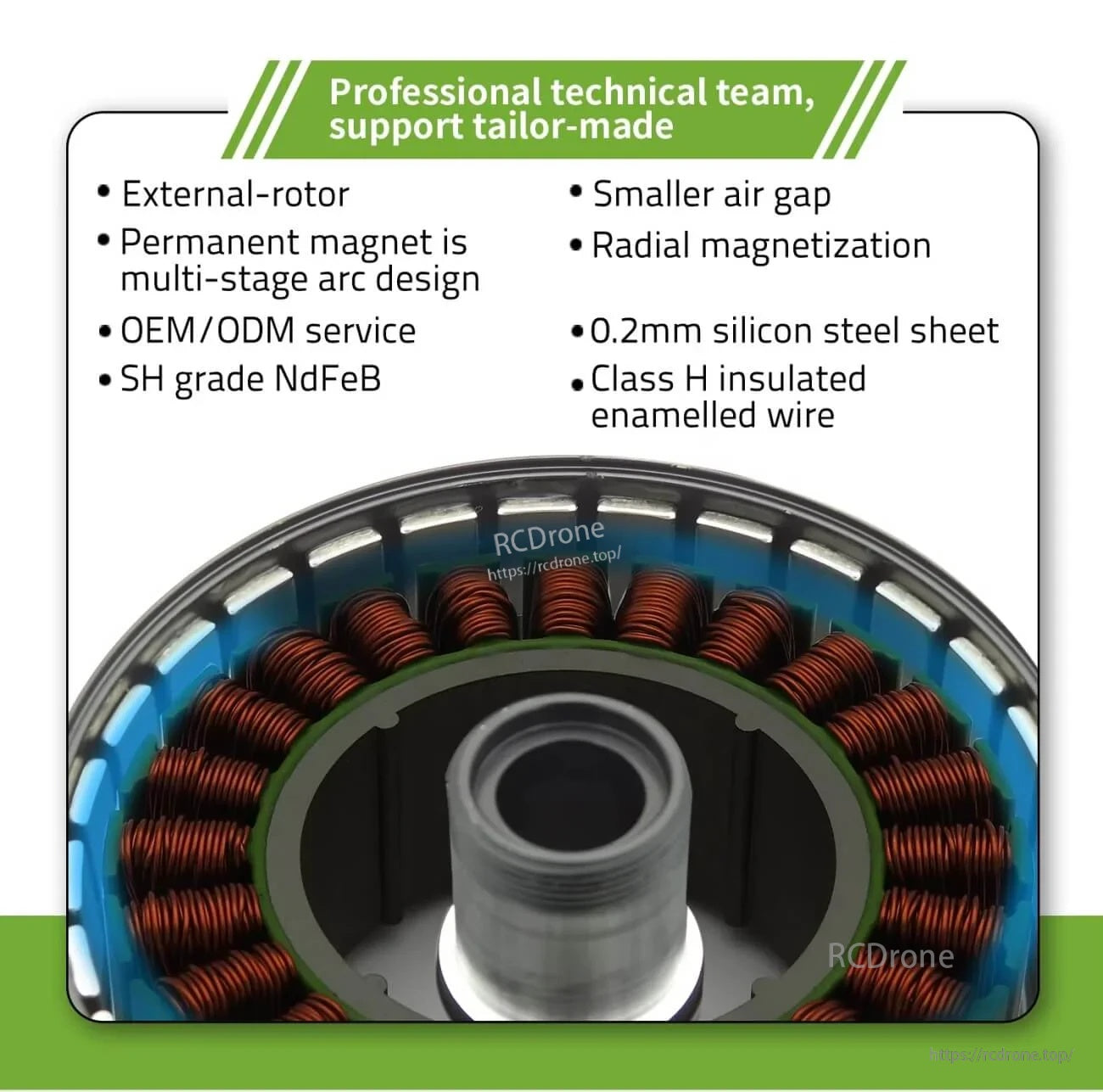
- Conception à rotor externe
- Conception d'arc multi-étages à aimant permanent
- Classe SH NdFeB
- Écart d'air plus petit ; magnétisation radiale
- 0.Feuille d'acier au silicium de 2 mm
- Fil émaillé isolé de classe H
- Prend en charge l'entrée PWM
- Le support de communication CAN et RS485 varie selon les débits en bauds
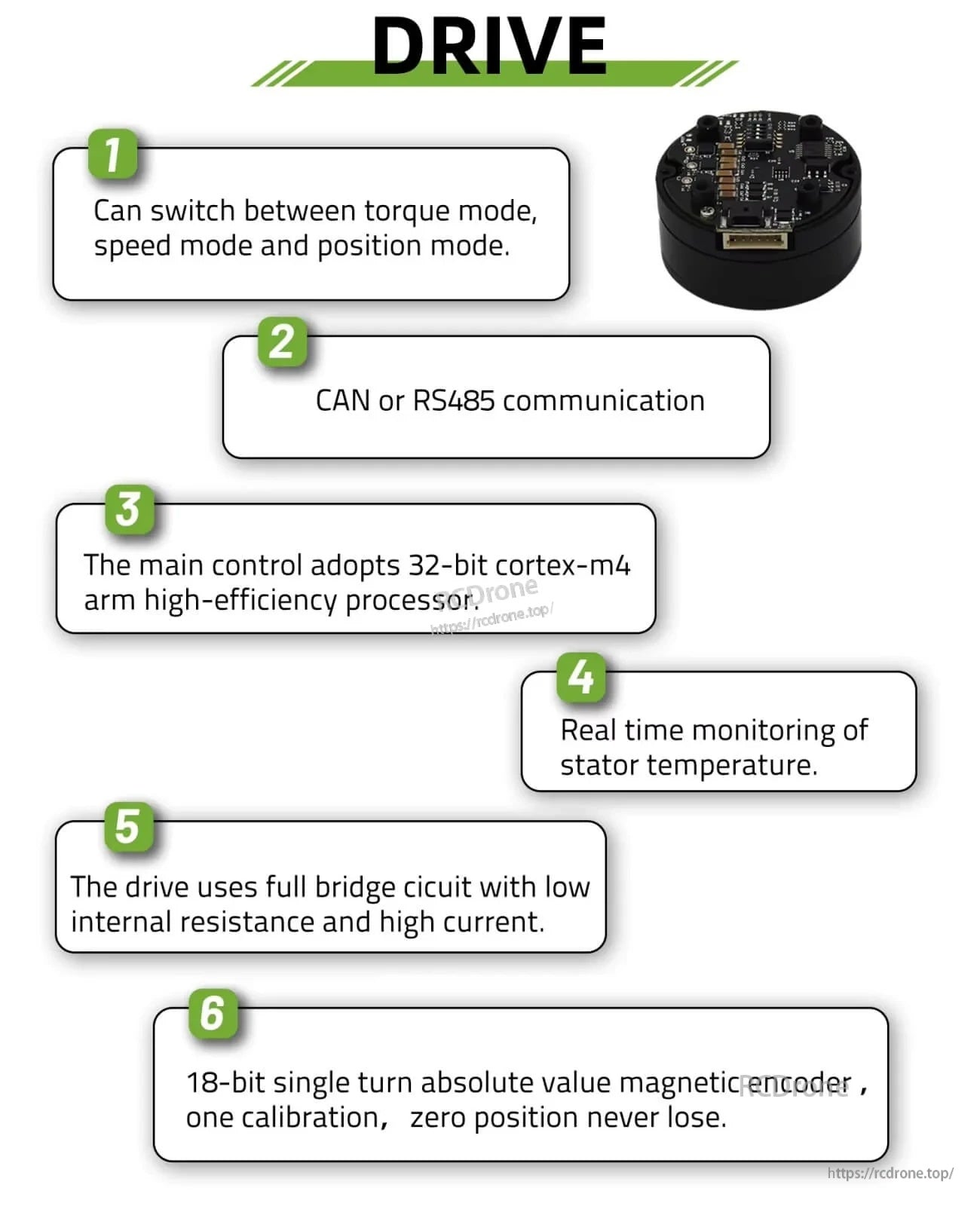
- Fonctions de conduite (comme présenté) : commutation du mode couple/vitesse/position ; processeur ARM Cortex-M4 32 bits à haute efficacité ; surveillance en temps réel de la température du stator ; circuit en pont complet avec faible résistance interne et courant élevé ; encodeur magnétique absolu à valeur unique de 18 bits (une calibration, position zéro jamais perdue)
- Logiciel de programme fourni pour ajuster les paramètres, tester et mettre à jour ; prend en charge le développement open source tel que PC, MCU, PLC, ICP et RPi
Pour des questions d'intégration (câblage, sélection de l'entraînement ou configuration de l'interface), contactez [email protected] or visitez https://rcdrone.top/.
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Caméra PTZ
- Laser Lidar
- Robot d'inspection de station d'énergie
- Inspection industrielle
Spécifications
| Paramètre | Valeur (15 tours) | Valeur (25 tours) |
|---|---|---|
| Nom de l'article | MF6010v2 | MF6010v2 |
| Tours | 15 | 25 |
| Tension nominale | 24V | 24V |
| Vitesse max | 2200RPM | 1280RPM |
| Couple nominal | 0.55N.m | 0.55N.m |
| Vitesse nominale | 1700RPM | 900RPM |
| Courant nominal | 5.3A | 3.1A |
| Puissance maximale | 175W | 70W |
| Couple maximal | 4N.m | 2.7N.m |
| Constante de vitesse | 71rpm/V | 37.5rpm/V |
| Constante de couple | 0.18N.m/A | 0.10N.m/A |
| Type de bobinage | Y | Y |
| Résistance de ligne | 0.65Ω | 1.59Ω |
| Inductance de phase | 0.34mH | 0.99mH |
| Poles du moteur | 28 | 28 |
| Inertie du rotor | 394gcm² | 394gcm² |
| Température du moteur | OUI | OUI |
| Charge nominale des roulements | 280N | 280N |
| Poids du moteur | 193g | 193g |
| Conduite recommandée | DF40v2 | DF40v2 |
| Tension d'entrée de la conduite | 7.4-32V | 7.4-32V |
| Communication | RS485 OU CAN | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | Encodeur magnétique 18 bits | Encodeur magnétique 18 bits |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (24KHz)/Boucle de vitesse (8KHz)/Boucle de position (8KHz) | Boucle de couple (24KHz)/Boucle de vitesse (8KHz)/Boucle de position (8KHz) |
| Courbe d'accélération | Accélération trapézoïdale | Accélération trapézoïdale |
Définition de l'interface
- ID SWITCH
| Interface | Remarque |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation négative |
| V- | Alimentation négative |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Manuels
Détails

MF6010v2 est un moteur intégré compact pour actionneurs robotiques, mis à jour avec un encodeur magnétique de 18 bits plus une entrée PWM et un contrôle CAN/RS485.
Une disposition mécanique-électrique intégrée maintient l'actionneur mince tout en conservant un retour d'information précis et un couple élevé.
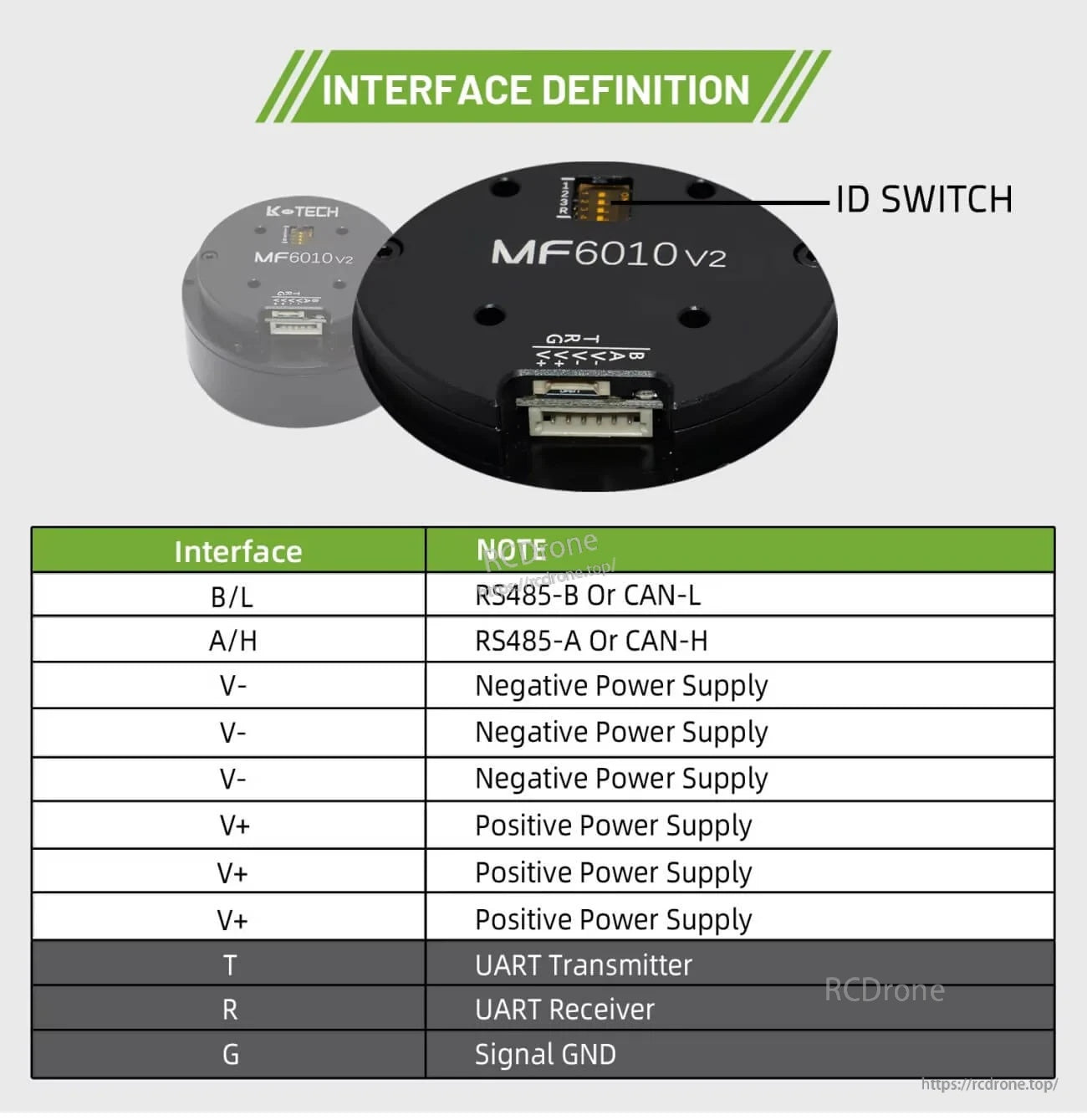
Un étiquetage clair des connecteurs et un interrupteur d'identification intégré aident à la configuration de bus multi-moteurs utilisant RS485 ou CAN.
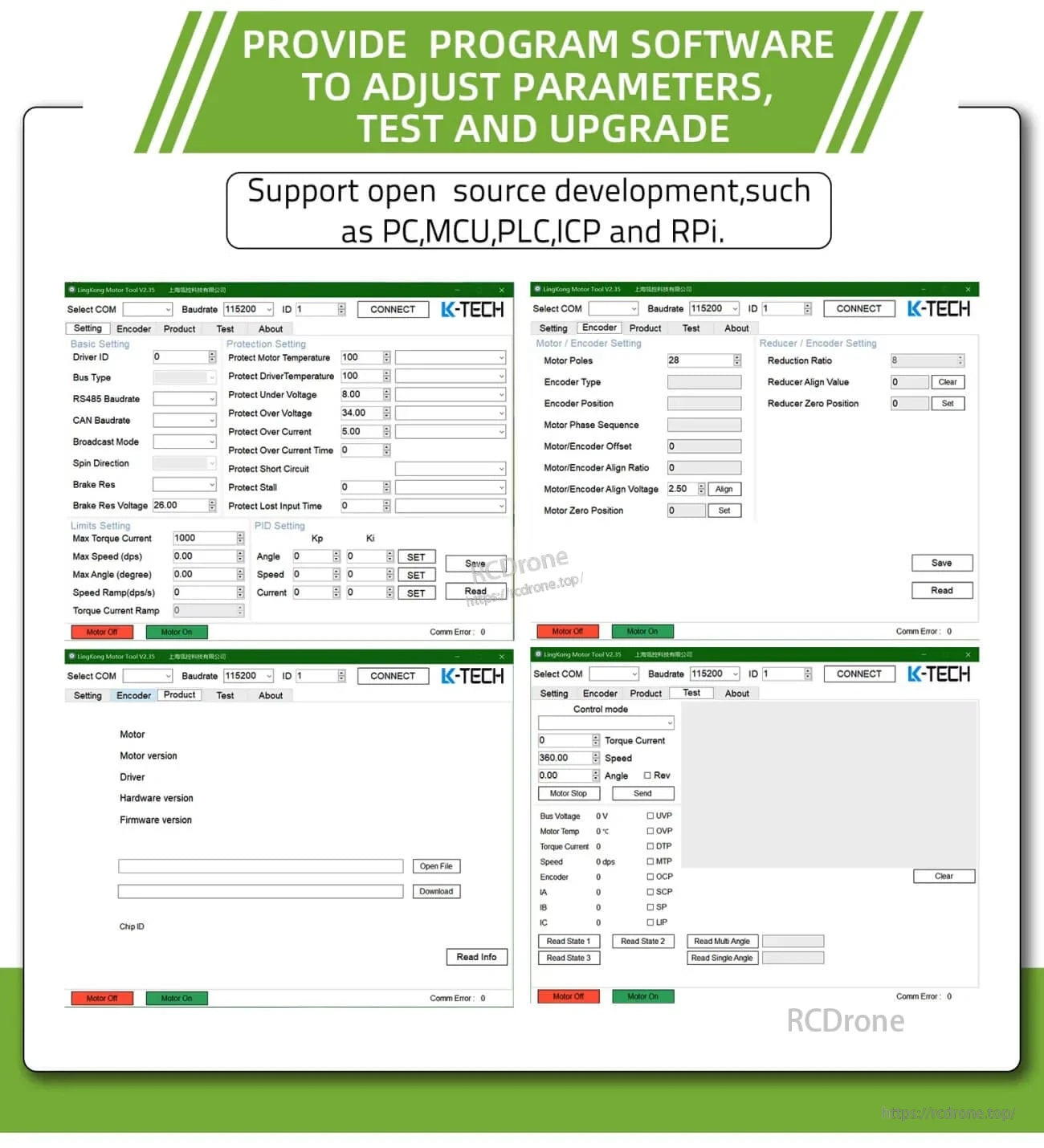
Un logiciel de configuration est fourni pour le réglage des paramètres, les tests et les mises à jour lors de l'intégration et de la mise en service.

Related Collections



